38, 35, 36, 40, 41 гидроцилиндр оказывается зафиксированным относительно основного штока 14 подпружиненными шариками 27, 28 и 32, 33. При подаче давления рабочей среды в полости 36 и 40 полый управляющий поршень 34 расклинивает шток 14 перемещением шариков 33, позволяя тем самым поршню 24 дополнительно введенного гидроцилиндра перемещаться вверх до момента выравнивания давления в полостях 35, 36, Шток 14 при этом остается заклиненным в верхней управляемой тормозной муфте. При подаче рабочей среды в полости 36 и 37 штдк 14, заклиненный шариками 32, 33, перемещается вверх при перемещении вверх поршня 24, Варьируя подачей давления в различные полости, осуществляют перемещение основного штока 14 относительно неподвижного корпуса гидроцилиндра либо перемещение самого корпуса гидроцилиндра относительно штока 14, 1 з.п. ф-лы, 4 ил.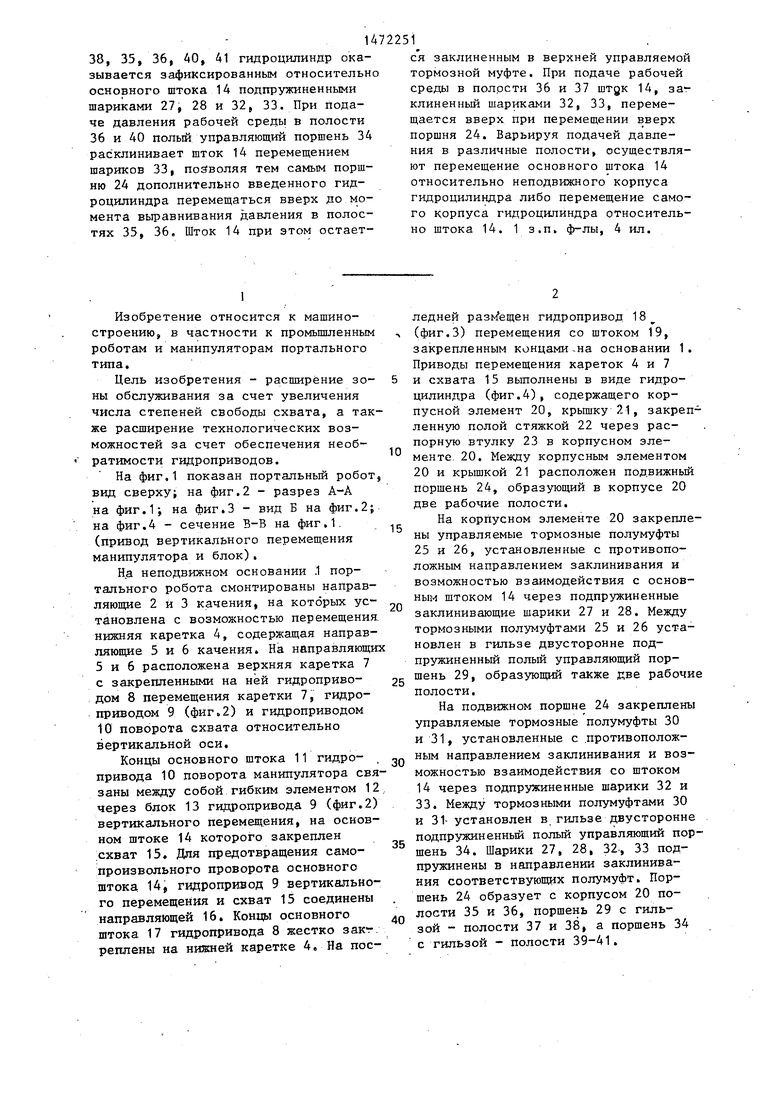
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический стояночный тормоз | 1989 |
|
SU1664623A1 |
| Манипулятор | 1980 |
|
SU1166877A1 |
| Система гидропривода регулирующей арматуры эксплуатационной линии | 2022 |
|
RU2788273C1 |
| НАСОС ПОРШНЕВОЙ ГИДРОПРИВОДНОЙ | 2019 |
|
RU2703856C1 |
| Устройство для дорнования отверстий труб | 1990 |
|
SU1738616A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| НАСОС ПОРШНЕВОЙ ГИДРОПРИВОДНОЙ | 2019 |
|
RU2719754C1 |
| Устройство для передачи деталей между прессами | 1980 |
|
SU897351A1 |
Изобретение относится к машиностроению и ,в частности к промышленным роботам и манипуляторам портального типа. Целью изобретения является расширение зоны обслуживания за счет увеличения числа степеней свободны схвата, а также расширение технологических возможностей за счет обеспечения необратимости гидроприводов. Каждый гидропривод перемещения подвижных элементов портального робота состоит из трех корпусных элементов, внутри которых расположен основной шток 14. При отсутствии давления рабочей среды в полостях 37, 38, 35, 36, 40, 41 гидроцилиндр оказывается зафиксированным относительно основного штока 14 подпружиненными шариками 27,28 и 32, 33. При подаче давления рабочей среды в полости 36 и 40 полый управляющий поршень 34 расклинивает шток 14 перемещением шариков 33, позволяя тем самым поршню 24 дополнительно введенного гидроцилиндра перемещаться вверх до момента выравнивания давления в полостях 35, 36. Шток 14 при этом остается заклиненным в верхней управляемой тормозной муфте. При подаче рабочей среды в полости 36 и 37 шток 14, заклиненный шариками 32, 33, перемещается вверх при перемещении вверх поршня 24. Варьируя подачей давления в различные полости, осуществляют перемещение основного штока 14 относительно неподвижного корпуса гидроцилиндра либо перемещение самого корпуса гидроцилиндра относительно штока 14. 1 з.п. ф-лы, 4 ил.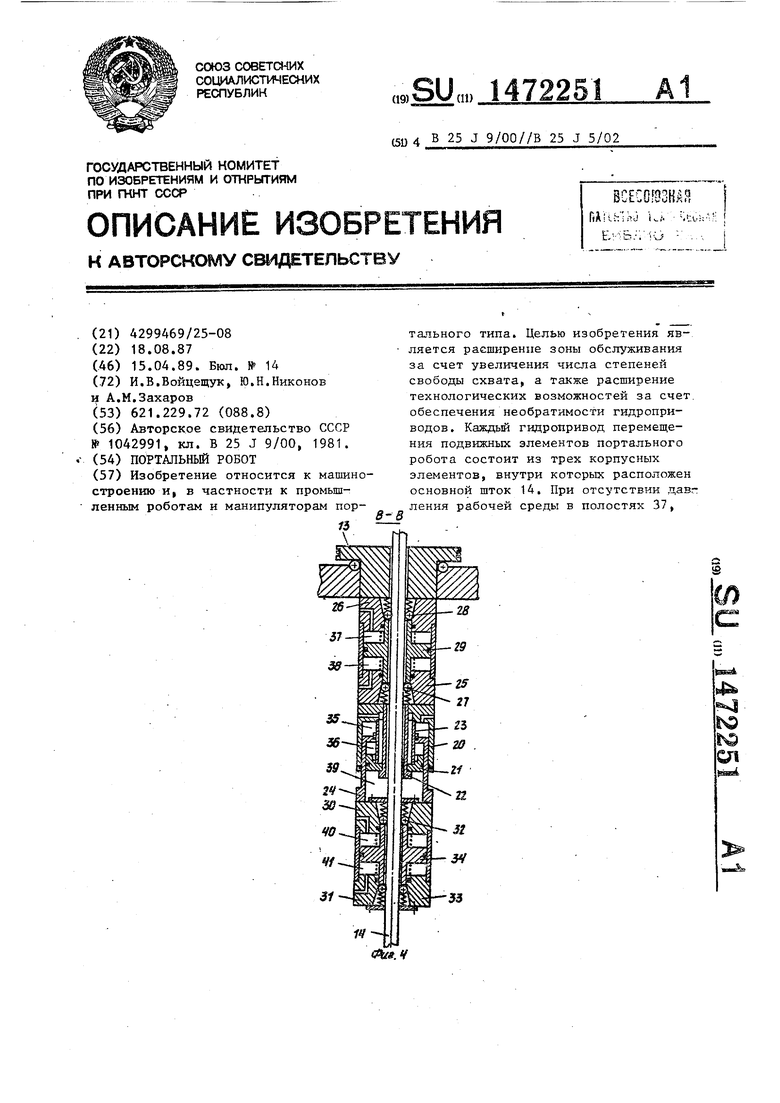
1
Изобретение относится к машиностроению, в частности к промьшшенным роботам и манипуляторам портального типа.
Цель изобретения - расширение во- ны обслуживания за счет увеличения числа степеней свободы схвата, а также расширение технологических возможностей за счет обеспечения необратимости гидроприводов.
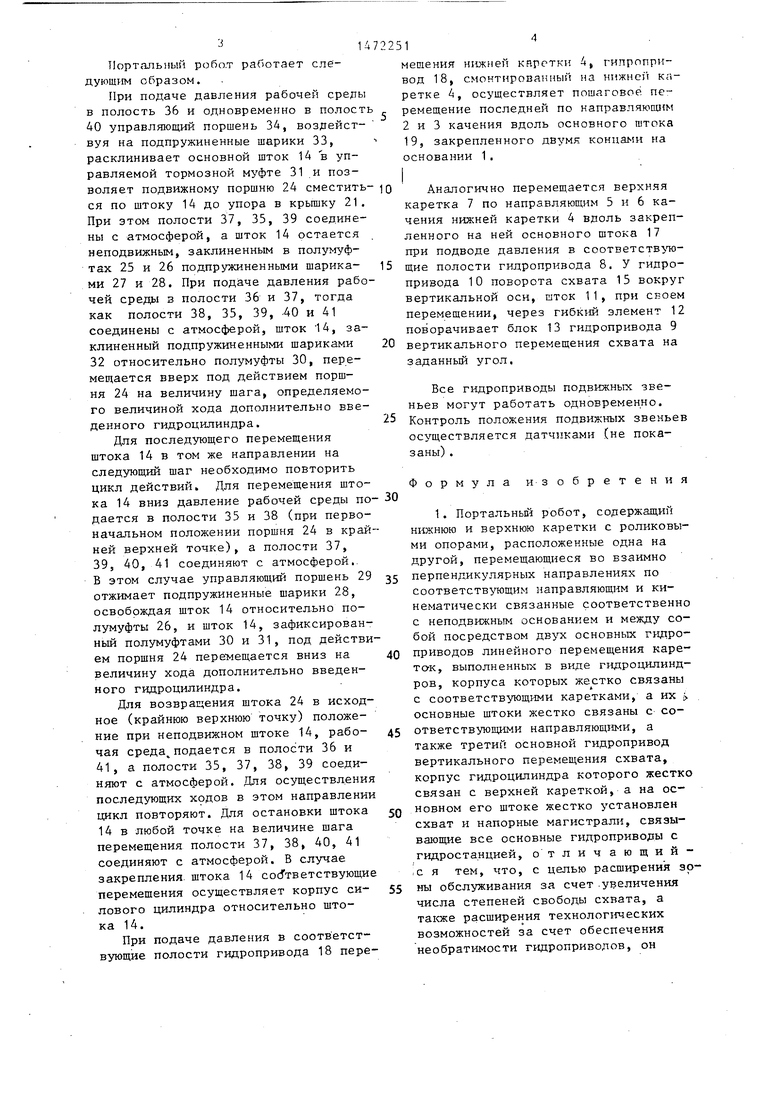
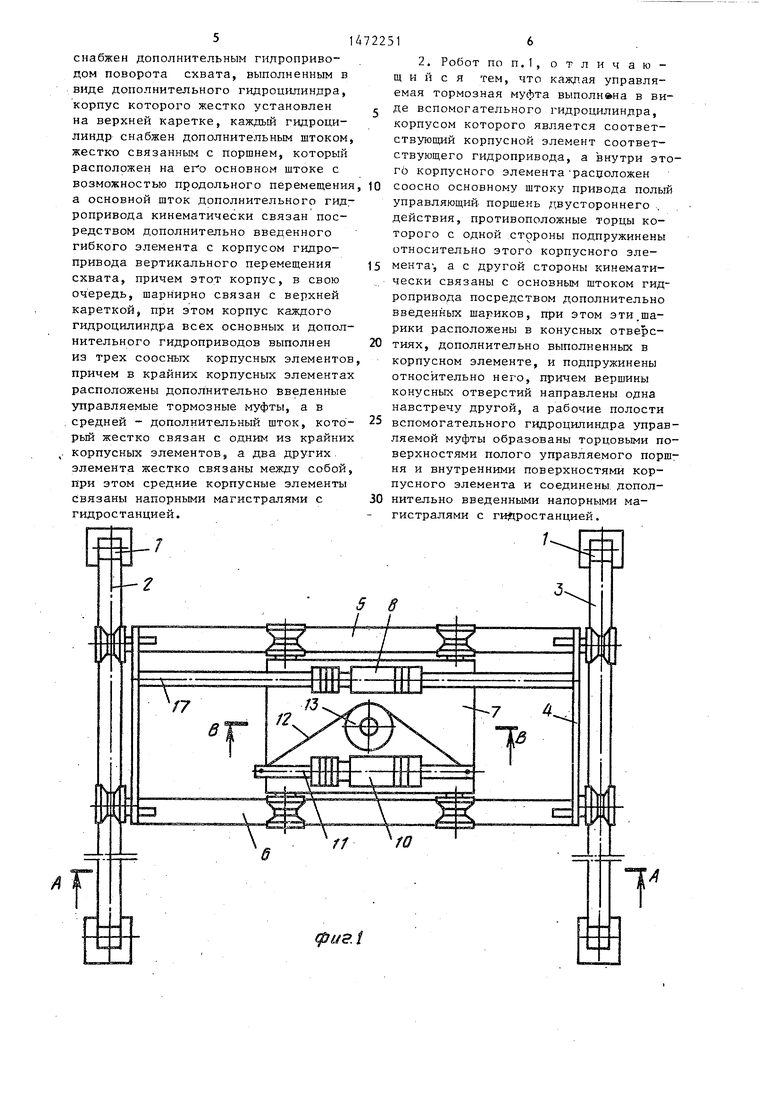
На фиг,1 показан портальный робот, вид сверху; на фиг,2 - разрез А-А на фиг,1-, на фиг,3 - вид Б на фиг,2| на фиг.4 - сечение В-В на фиг,1. (привод вертикального перемещения манипулятора и блок).
На неподвижном основании .1 портального робота смонтированы направляющие 2 и 3 качения, на которых ус- тановлена с возможностью перемещения, нижняя каретка 4, содержащая направляющие 5 и 6 качения. На направляющих 5 и 6 расположена верхняя каретка 7 с закрепленными на ней гидроприво- дом 8 перемещения каретки 7, гидро- . приводом 9 (фиг.2) и гидроприводом 10 поворота схвата относительно вертикальной оси.
Концы основного штока 11 гидро- , привода 10 поворота манипулятора связаны между собой гибким элементом 12 через блок 13 гидропривода 9 (фиг.2) вертикального перемещения, на основном штоке 14 которого закреплен схват 15. Для предотвращения самопроизвольного проворота основного штока 14, гидропривод 9 вертикального перемещен Ш1 и схват 15 соединены направляющей 16. Концы основного штока 17 гидропривода 8 жестко закг. реплены на нижней каретке 4. На пос0
,
5
g
Q 25
Q Q
ледней гидропривод 18 (фиг,3) перемещения со штоком 19, закрепленным концами-на основании 1, Приводы перемещения кареток 4 и 7 и схвата 15 вьшолнены в виде гидроцилиндра (фиг,4), содержащего корпусной элемент 20, крьш1ку 21, закрепленную полой стяжкой 22 через распорную втулку 23 в корпусном элементе. 20, Между корпусным элементом 20 и крышкой 21 расположен подвижньш поршень 24, образующий в корпусе 20 две рабочие полости.
На корпусном элементе 20 закреплены управляемые тормозные полумуфты 25 и 26, установленные с противоположным направлением заклинивания и возможностью взаимодействия с основным штоком 14 через подпружиненные заклинивающие шарики 27 и 28, Между тормозными полумуфтами 25 и 26 установлен в гильзе двусторонне подпружиненный полый управляющий поршень 29, образующий также две рабочие полости.
На подвижном поршне 24 закреплены управляемые тормозные полумуфты 30 и 31, установленные с .противоположным направлением заклинивания и возможностью взаимодействия со штоком 14 через подпружиненные шарики 32 и 33, Между тормозными полумуфтами 30 и 31- установлен в гильзе двусторонне подпружиненный полый управляющий поршень 34, Шарики 27, 28, 32-, 33 подпружинены в направлении заклинивания соответствующих полумуфт. Поршень 24 образует с корпусом 20 полости 35 и 36, поршень 29 с гильзой - полости 37 и 38, а поршень 34 с гильзой - полости 39-41.
Портальный робот работает следующим образом.
При подаче давления рабочей среды в полость 36 и одновременно в полость 40 управляющий поршень ЗА, воздействуя на подпружиненные шарики 33, расклинивает основной шток 14 в управляемой тормозной муфте 31 и позволяет подвижному поршню 24 сместить- ся по штоку 14 до упора в крышку 21. При этом полости 37, 35, 39 соединены с атмосферой, а шток 14 остается неподвижным, заклиненным в полумуфтах 25 и 26 подпружиненными шариками 27 и 28. При подаче давления рабочей среды 3 полости 36 и 37, тогда как полости 38, 35, 39, -40 и 41 соединены с атмосферой, шток 14, заклиненный подпружиненными шариками 32 относительно полумуфты 30, перемещается вверх под действием поршня 24 на величину шага, определяемого величиной хода дополнительно введенного гидроцилиндра.
Для последующего перемещения штока 14 в том же направлении на следующий шаг необходимо повторить цикл действий. Для перемещения штока 14 вниз давление рабочей среды по дается в полости 35 и 38 (при первоначальном положении поршня 24 в крайней верхней точке), а полости 37, 39, 40, 41 соединяют с атмосферой. В этом случае управляющий поршень 29 отжимает подпружиненные шарики 28, освобождая шток 14 относительно полумуфты 26, и шток 14, зафиксированный полумуфтами 30 и 31, под действием порщня 24 пере-мещается вниз на величину хода дополнительно введенного гидроцилиндра.
Для возвращения штока 24 в исходное (крайнюю верхнюю точку) положение при неподвижном штоке 14, рабочая среда подается в полости 36 и 41, а полости 35, 37, 38, 39 соединяют с атмосферой. Для осуществлени последующих Х9дов в этом направлени цикл повторяют. Для остановки штока 14 в любой точке на величине шага перемещения полости 37, 38, 40, 41 соединяют с атмосферой. В случае закрепления, штока 14 сосГтветствующи перемещения осуществляет корпус силового цилиндра относительно штока 14.
При подаче давления в соответствующие полости гидропривода 18 пере
5
0
5
30
35
40
45
50
55
мещения Н1шией каретки 4, гипропрк- вод 18, смонтированный на нижней каретке 4, осуществляет пошаговое перемещение последней по направляющим 2 и 3 качения вдоль основного штока 19, закрепленного двумя концами на основании 1.
Аналогично перемещается верхняя каретка 7 по направляющим 5 и 6 качения нижней каретки 4 вдоль закрепленного на ней основного штока 17 при подводе давления в соответств то- щие полости гидропривода 8. У гидропривода 10 поворота схвата 15 вокруг вертикальной оси, шток 11, при своем перемещении, через гибкий элемент 12 поворачивает блок 13 гидропривода 9 вертикального перемещения схвата на заданньш угол.
Все гидроприводы подвижных звеньев могут работать одновременно. Контроль положения подвижных звеньев осуществляется датчиками (не показаны) .
Формула изобретения
51
снабжен дополнительным гидроприводом поворота схвата, выполненным в виде дополнительного гидроцилиндра, корпус которого жестко установлен на верхней каретке, каждый гидроцилиндр снабжен дополнительным штоком, жестко связанным с поршнем, который расположен на ег о основном штоке с возможностью продольного перемещения а основной шток дополнительного гидропривода кинематически связан посредством дополнительно введенного гибкого элемента с корпусом гидропривода вертикального перемещения схвата, причем этот корпус, в свою очередь, шарнирно связан с верхней кареткой, при этом корпус каждого гидроцилиндра всех основных и дополнительного гидроприводов выполнен из трех соосных корпусных элементов причем в крайних корпусных элементах расположены дополнительно введенные управляемые тормозные муфты, а в средней - дополнительный шток, кото - рый жестко связан с одним из крайних корпусных элементов, а два других, элемента жестко связаны между собой, при этом средние корпусные элементы связаны напорными магистралями с гидростанцией.
722516
10 соосно основному штоку привода полый управляющий поршень двустороннего действия, противоположные торцы которого с одной стороны подпружинены относительно этого корпусного эле15 мента-, а с другой стороны кинемати- ., чески связаны с основным штоком гидропривода посредством дополнительно введенных шариков, при этом эти,шарики расположены в конусных отверстиях, дополнительно выполненных в корпусном элементе, и подпружинены относительно него, причем вершины конусных отверстий направлены одна навстречу другой, а рабочие полости
25 вспомогательного гидроцилиндра управляемой муфты образованы торцовыми поверхностями полого управляемого поршня и внутренними поверхностями корпусного элемента и соединены допол30 нительно введенными напорными магистралями с гидростанцией.
/.
20
| Робот-укладчик | 1981 |
|
SU1042991A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
