1
Изобретение относится к промышленному транспорту, в частности к устройствам для внутрицеховых перевозок, например транспортным тележкам в автоматизированных безлвдных производствах, .
Цель изобретения обеспечение разгрузки и погрузки тары на две стороны рольганга.
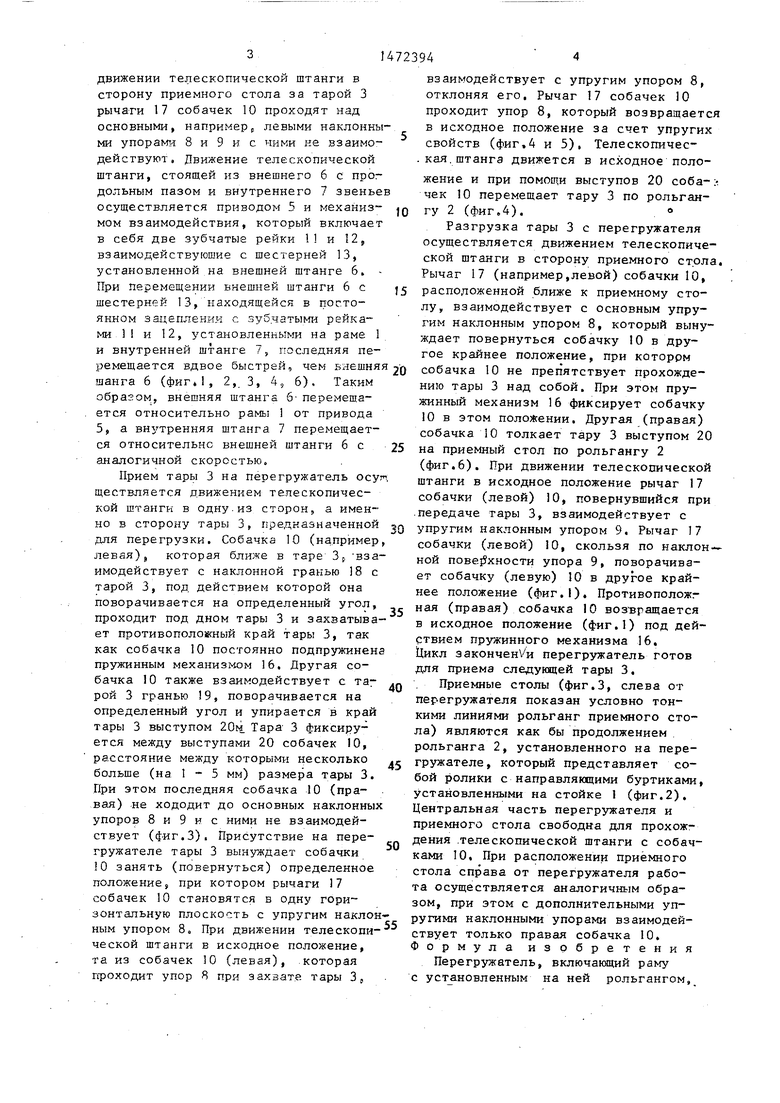
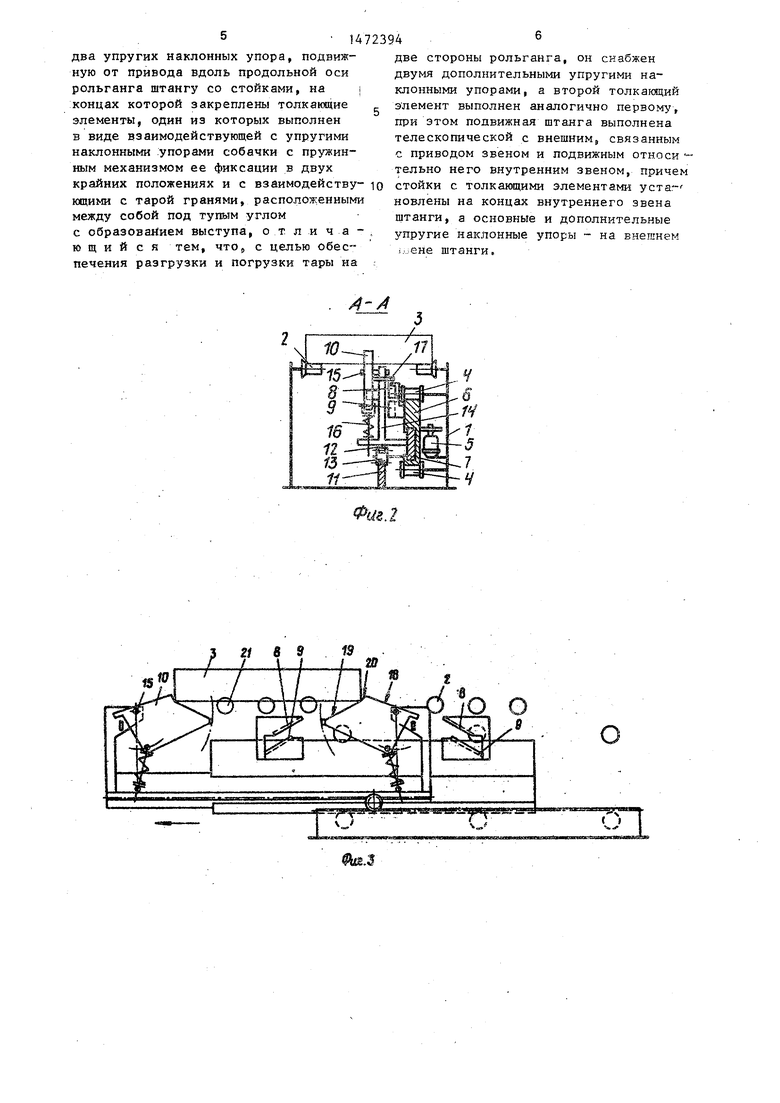
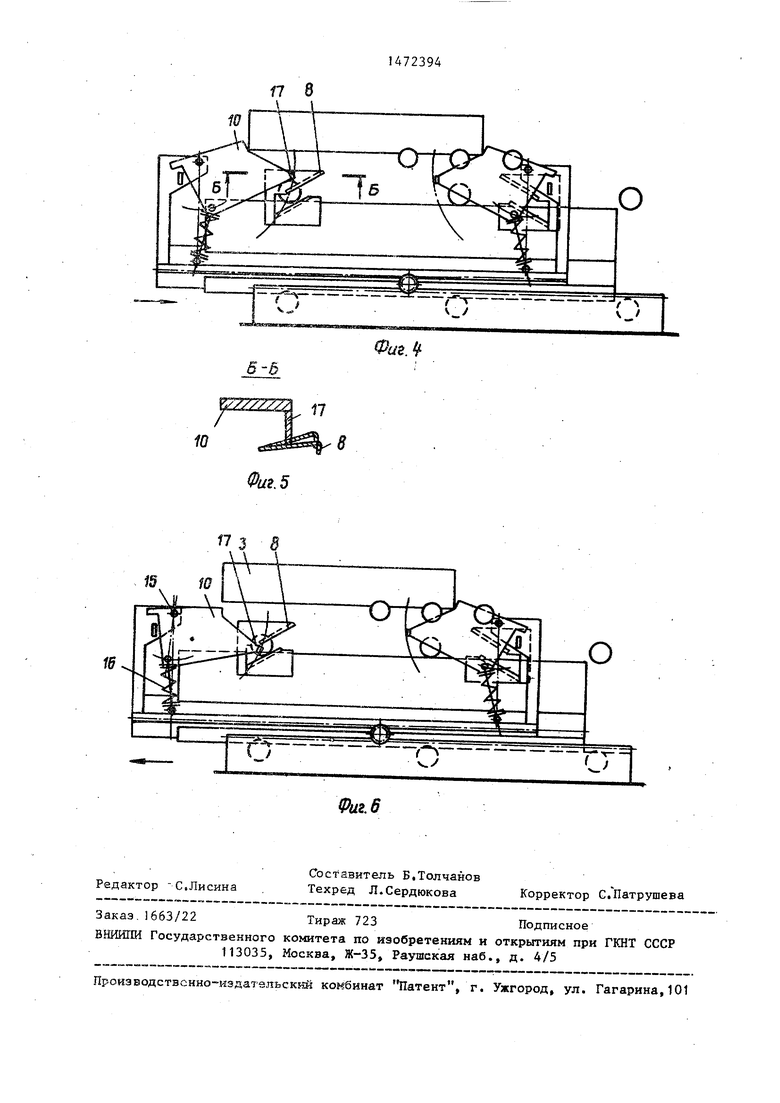
На фиГб1 схематически изображен предлагаемый перегружатель;на фиг.2 разрез А-А на фиг.1; на фиг.З - пере гружатель при захвате тары с приемного стола; на фиг,4 - то же, в момент захвата тары и возвращения его в исходное положение; на фиг.З - сечение Б-Б на фиг.4; на фиг, 6 - перегружатель в момент передачи тары на приемный стол (стрелками показано направление движения телескопической штанги),
Перегружатель содержит раму 1, на которой смонтирован рольганг 2 для тары 3, установленную на роликах 4 подвижную вдоль продольной оси рольганга 2 от привода 5 телескопическую штангу, состоящую из внешнего соединенного с приводом 5 и выполнен-- ного с продольным пазом звена 6 и подвижного относительно него внутренне го звена 7, На штанге смонтированы основные и дополнительные упругие наклонные упоры 8 и 9, управляющие собачками 10 толкающих элементов.
2
взаимодействующих с тарой 3 Штанга имеет механизм взаимодействия ее звеньев 6 и 7, который состоит из
зубчатых реек П и 12, установленных на раме 1 и внутреннем 7 звене штак- ги, и шестерни 13,, Остановленной меж ду рейками П и 12 и закрепленной на внешнем 6 звене штанги. На внутреннем
0 7 звене, на ее концах, установлены стойки 14 с закрепленными на них собачками 10 при помощи осей 15 и пру- жинными механизмами 16, фиксирующими собачки 10 в двух крайних положениях,
5 Собачки 10 имеют рычаги 17, взаимодействующие с основными и дополнительными наклонными упорами 8 и 9, которые установлены на внешнем 6 звене штанги. Грани 18 и 19 собачек 10,
0 взаимодействующие с т йр;ой 3; обрйзу- ют между собой тупой угол с выступом 20 между ними (фиг.З). Рольганг приемного стола 21 показан условно, тонкими линиями (фиг.З). Для удобства
5 чтения с чертежей рольганг 2 перегру - жателя показан условно в виде трех роликов 2 на фиг.1, 3, 4, 6. Б действительности рольганг 2 состоит из множества роликов 2 для перемещения
0 по ним тары 3,
Перегружатель работает следующим образом.
В исходном положении, без тары 3, собачки 10 Нс)ходятся в верхнем фикси- рованком положении (фиг.1 и 2) и при
движении телескопической штанги в сторону приемного стола за тарой 3 рычаги 17 собачек 10 проходят над основными, например левыми наклонными упорами 8 и 9 и с ними ке взаимодействуют. Движение телескопической штанги, стоящей из внешнего 6 с прог- дольным пазом и внутреннего 7 звенье осуществляется приводом 5 и механизмом взаимодействия, который включает в себя две зубчатые рейки 1 и 12, взаимодейству ошие с шестерней 13, установленной на внешней штанге 6. - При перемещении внешней штанги 6 с шестерней 13, находящейся в постоянном за1;еплении с зуб.чатыми рейками 1 и 12, установленными на раме 1 и внутренней штанге 7, последняя перемещается вдвое быстрей, чем внешня шанга 6 (фиг«1, 2, 3, 4, 6). Таким образом, внешняя штанга б- перемешается относительно рамы 1 от привода 5, а внутренняя штанга 7 перемещается относительно внешней штанги 6с аналогичной скоростью.
Прием тары 3 на перегружатель осуп ществляется движением телескопической штангк в одну.из сторон, а именно в сторону тары 3, предназначенной для перегрузки. Собачка 10 (например левая), которая ближе в таре 3f взаимодействует с наклонной гранью 18 с тарой 3, под действием которой она поворачивается на определенный угол, проходит под дном тары 3 и захватывает противоположный край тары 3, так как собачка 10 постоянно подпружинена пружинным механизмом 16. Другая собачка 10 также взаимодействует с тарой 3 гранью 9, поворачивается на определенный угол и упирается в край тары 3 выступом 20м Тара 3 фиксируется между выступами 20 собачек 10, расстояние между которыми несколько больше (на 1 - 5 мм) размера тары 3. При этом последняя собачка 10 (правая) ,не хододит до основных наклонных упоров 8 и 9 и с ними не взаимодействует (фиг.З). Присутствие на перегружателе тары 3 вынуждает собачки 0 занять (повернуться) определенное положение, при котором рычаги 17 собачек 10 становятся в одну гори зонтальную плоскость с упругим наклонным упором 8. При движении телескопической штанги в исходное положение, та из собачек 10 (левая), .которая гфоходит упор 8 при захвата тары 3,
10
2п 25
Q
472394 4
взаимодействует с упругим упором 8, отклоняя его. Рычаг 17 собачек 10 проходит упор 8, который возвращается в исходное положение за счет упругих свойств (фиг,4 и 5), Телескопическая, штанга движется в исходное положение и при помощи выступов 20 соба- : чек 10 перемещает тару 3 по рольгангу 2 (фиг.4).о
Разгрузка тары 3 с перегружателя осуществляется движением телескопической штанги в сторону приемного стола. Рычаг 17 (например,левой) собачки 10, 15 расположенной ближе к приемному столу, взаимодействует с основным упругим наклонным упором 8, который вынуждает повернуться собачку 10 в другое крайнее положение, при которрм собачка 10 не препятствует прохождению тары 3 над собой. При этом пружинный механизм 16 фиксирует собачку 10 в этом положении. Другая (правая) собачка 10 толкает тару 3 выступом 20 на приемный стол по рольгангу 2 (фиг.6). При движении телескопической штанги в исходное положение рычаг 17 собачки (левой) 10, повернувшийся при передаче тары 3, взаимодействует с упругим наклонным упором 9. Рычаг 17 собачки (левой) 10, скользя по наклонной повег хности упора 9, поворачивает собачку (левую) 10 в другое крайнее положение (фиг.I). Противоположг 25 ная (правая) собачка 10 воз-вращается в исходное положение (фиг.1) под действием пружинного механизма 16. Цикл 3aKOH4eHVH перегружатель готов для приема следующей тары 3.
Приемные столы (фиг.З, слева от перегружателя показан условно тонкими линиями рольганг приемного стола) являются как бы продолжением рольганга 2, установленного на перегружателе, который представляет собой ролики с направляющими буртиками, установленными на стойке 1 (фиг.2). Центральная часть перегружателя и приемного стола свободна для прохождения .телескопической штанги с собачками 10. При расположении приёмного стола справа от перегружателя работа осуществляется аналогичным образом, при этом с дополнительными упругими наклонными упорами взаимодействует только правая собачка 10. Формула изобретения
Перегружатель, включающий раму с уст ановленкым на ней рольгангом.
40
45
50
два упругих наклонных упора, подвижную от привода вдоль продольной оси рольганга штангу со стойками, на концах которой закреплены толканяцие элементы, один из которых выполнен в виде взаимодействующей с упругими наклонными .упорами собачки с пружинным механизмом ее фиксации в двух
крайних положениях и с взаимодейству- ю стойки с толкающими элементами устающими с тарой гранями, расположенными между собой под тупым углом с образованием выступа, отличающийся тем, 4TOj с целью обеспечения разгрузки и погрузки тары на
новлены на концах внутреннего звена щтанги, а основные и дополнительные упругие наклонные упоры на внешнем .,.ене штанги.
две стороны рольганга, он снабжен двумя дополнительными упругими наклонными упорами, а второй толкакнций элемент выполнен аналогично первому, при этом подвижная штанга выполнена телескопической с внешним, связанным с приводом звеном и подвижным относи - тельно него внутренним звеном, причем
стойки с толкающими элементами установлены на концах внутреннего звена щтанги, а основные и дополнительные упругие наклонные упоры на внешнем .,.ене штанги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегружатель | 1989 |
|
SU1623927A2 |
| Перегружатель | 1986 |
|
SU1407890A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Устройство для базирования листов | 1978 |
|
SU791474A1 |
| Сталкивающее перегрузочное устройство для обслуживания транспортного средства | 1987 |
|
SU1465402A1 |
| Устройство для базирования листов | 1976 |
|
SU577102A1 |
| Автоматическое загрузочное устройство | 1973 |
|
SU500021A1 |
| Устройство для базирования листов | 1980 |
|
SU904844A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Сталкиватель обрези к гильотинным ножницам | 1980 |
|
SU912416A1 |
Изобретение относится к промышленному транспорту и позволяет обеспечить разгрузку и погрузку тары на две стороны. Перегружатель включает раму 1 со смонтированным на ней рольгангом 2, два упругих наклонных основных и два упругих дополнительных упора /У/ 8,9 и подвижную телескопическую штангу. Внешнее звено в последней связано с приводом, а внутреннее звено 7 установлено подвижно относительно звена 6. При этом звенья 6,7 связаны через смонтированные на них зубчатые рейки 11, 12 и размещенную между ними шестерню 13. На концах звена 7 установлены стойки 14 с аналогичными толкающими элементами в виде собачек /С/ 10 с взаимодействующими с тарой /Т/ 3 гранями, расположенными между собой под тупым углом с образованием выступа. При этом С 10 имеют пружинные механизмы 16 их фиксации в двух крайних положениях, а У 8,9 установлены на звене 6. При движении штанги в сторону приемного стола за Т 3 находящиеся в верхнем фиксированном положении С 10 проходят над У 8,9, не взаимодействуя с ними. Звено 7 перемещается на двойное перемещение звена 6. Первая в направлении перемещения С 10 утапливается Т 3 и захватывает ее за противоположный край при выходе из взаимодействия с ней. Другая С 10 взаимодействует с Т 3, поворачивается на некоторый угол и упирается в край Т 3 выступом. При возврате штанги С 10, прошедшая У 8,9, взаимодействует с У 8, отклоняя его. При разгрузке Т 3 ближняя к приемному столу С 10 взаимодействует с основным У 8, переводится в другое крайнее положение и не препятствует прохождению через нее Т 3 при возврате штанги. При этом С 10 возвращается У 9 в исходное положение. 6 ил.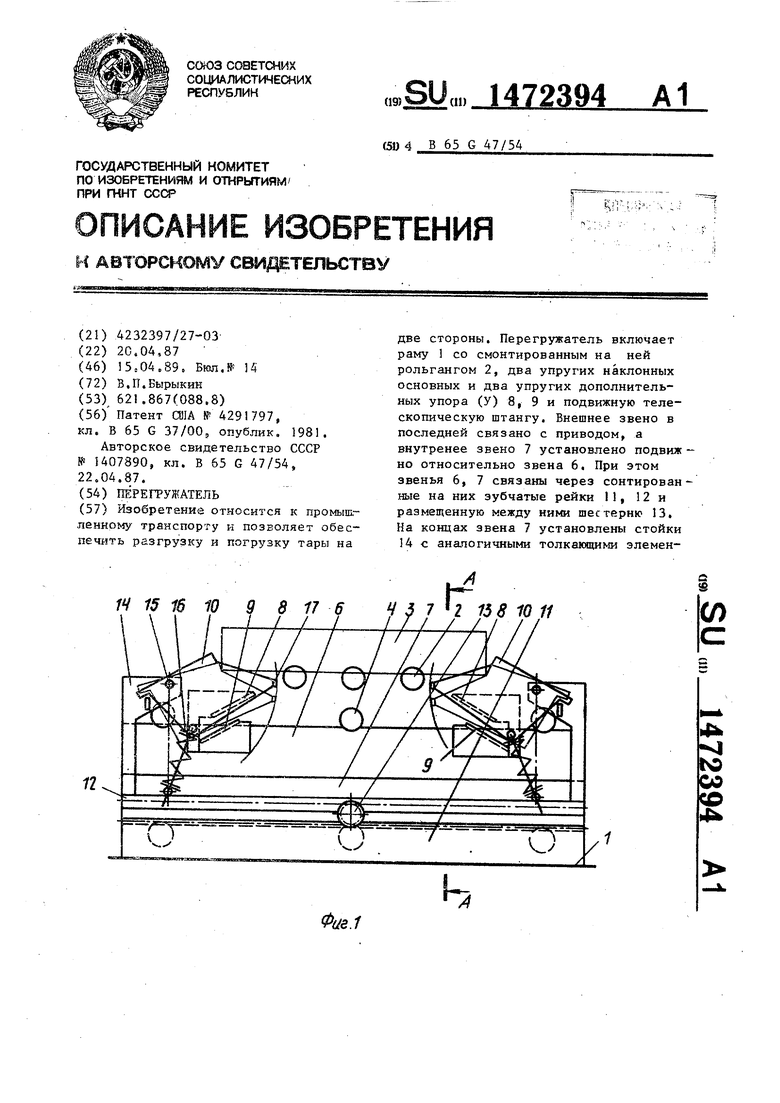
-/
fS
Фа.2
&
dlo о
Фи2.5
IS
О
Фа.
о
| Патент ША fP 4291797, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Перегружатель | 1986 |
|
SU1407890A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
