фиг. 2
Изобретение относится к перегрузочным У . 1-р)Й1:твам, используемым в транспортных распределительных системах для передачи тарных грузов, и может быть применено для выполнения перегрузочных операций в условиях разветвленных транспортных систем с применением мобильных транспортных средств, при автоматизации данных операций в различных производствах.
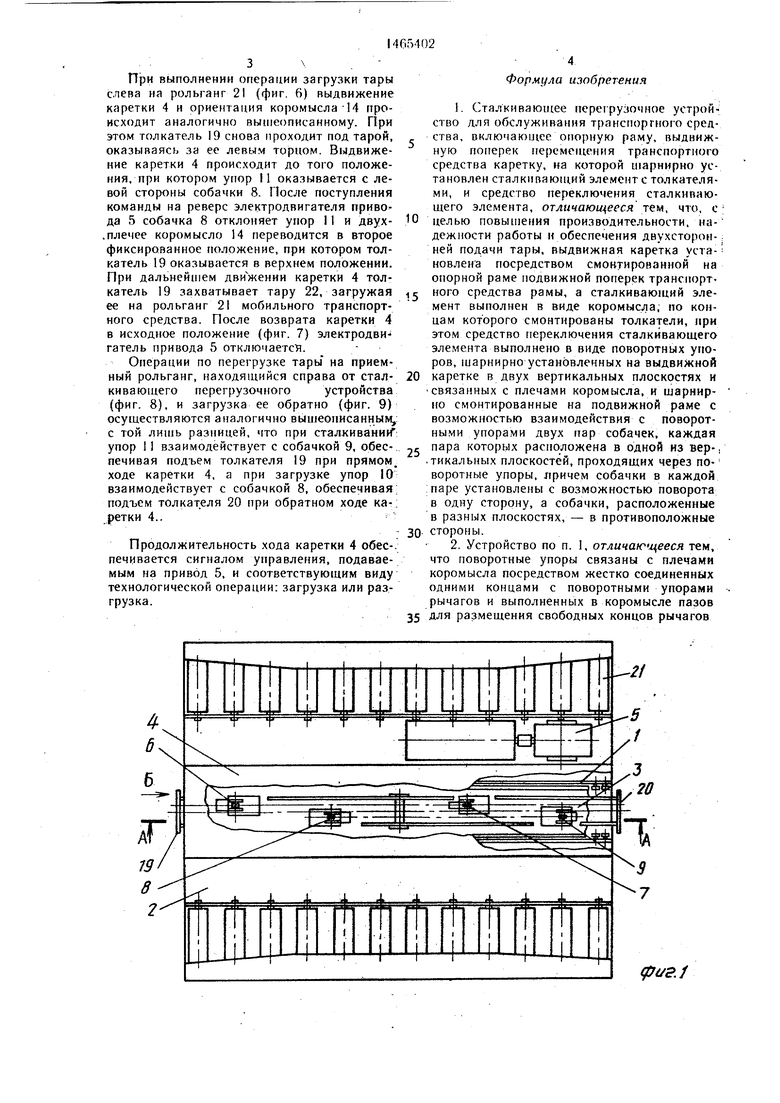
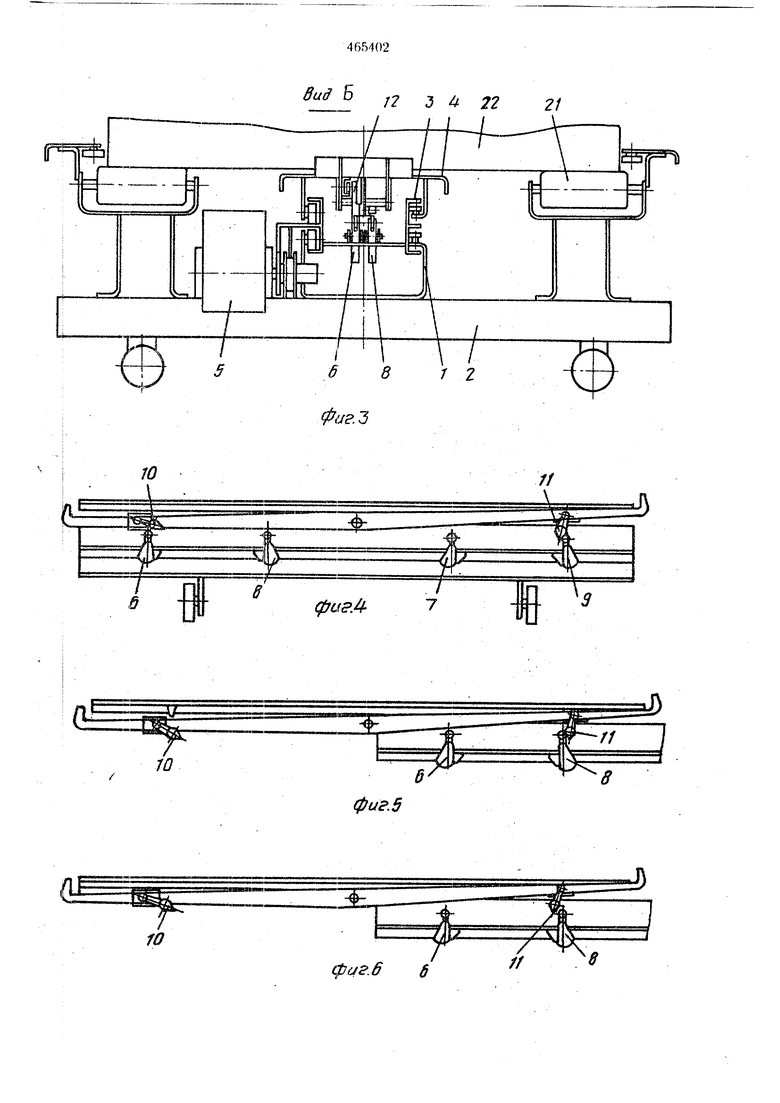
Цель изобретения - повышение произ- i водительности, надежности работы и обеспе- чение двухсторонней подачи тары. I На фиг. 1 изображено предлагаемое уст- I ройство и исходном положении, план; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - устройство в ис- I ходном положении сталкивающего элемента ;для сталкивания груза влево или для за- ; грузки тары слева; на фиг. 5 - взаимное I положение подвижной рамы и каретки со ; сталкивающим элементом в конце рабочего хода сталкивания тары влево; на фиг. 6 - взаимное положение подвижной рамы и каретки в их крайнем левом положении перед I загрузкой тары слева; на фиг. 7 - устройство j в исходном положении сталкивающего эле- 1 мента для сталкивания тары вправо или для I загрузки тары справа; на фиг. 8 -- взаимное i положение подвижной рамы и каретки с I толкателями в конце рабочего хода сталки- i вания тары вправо; на фиг. 9 - взаимное I положение подвижной рамы и каретки в их i крайнем положении при загрузке тары справа.
Ста,;1кивающее перегрузочное устройство включает опорную раму 1, установленную на платформе 2 мобильного транспортного средства поперек его перемещения. ; На раме 1 с возможностью телескопи- ческого продольного выдвижения относитель- I но ее установлены подвижная направляю- 1 щая рама 3, на которой в свою очередь установлена телескопически выдвигаемая также в продольном направлении каретка 4. На платформе 2 также установлен реверсивный привод 5 выдвижения рамы 3 и каретки 4.
Кинематическая связь между приводом 5, подвижной рамой 3 и кареткой 4 может осущестЕ,ляться с помощью одной из известных передач, например, цепной.
На раме 3, вдоль нее, установлены в двух плоскостях поворачивающиеся вокруг горизонтальной оси две пары собачек 6 и 7, 8 и 9, а на каретке 4, по торцам ее, установ- лен1,1 ,оротные упоры 10 и 11. жестко соединенные соответственно с рычагами 12 и л. Упор 10 расположен в плоскости г; .-;чек 6 и 7, а упор 11 - в плоскости собачек 8 и 9.
Собачки 6 и 8 предназначены для взаимодействия соответственно с упорами 10 и 11 в начальном и конечном положениях каретки 4 при ее выдвижении влево от исходного (среднего) положения. Собачки 7 и 9
предназначены для взаимодействия соответственно с упорами 11 и 10 в начальном и конечном положениях каретки при ее выдвижении вправо от исходного положения.
Собачки 6 и 7, 8 и 9 поворачиваются соответственно по и против часовой стрелки. На каретке 4 симметрично установлено с возможностью фиксации в двух крайних положениях двухплечее коромысло 14, плечи
15 и 16 которого имеют пазы 17 и 18 для подвижной связи с рычагами 12 и 13. На концах коромысла 14 жестко закреплены толкатели 19 и 20. Коромысло 14 с толкателями является сталкивающим элементом, а поворотные упоры 10 и 11 и пары
5 собачек 6, 7 и 8, 9 являются средством переключения сталкивающего элемента.
Передача движения от поворотных упоров 10 и 11 к двухплечему коромыслу 14 осуществляется двумя кулисно-коромысловьь
Q ми механизмами, каждый из которых состоит из одного рычага (соответственно 12 или 13) и одной кулисы. Кулисами в данной конструкции служат плечи 15 и 16 коромысла 14.
5Рассмотренная кинематическая схема
передачи движения к двухплечему коромыслу является одним из возможных вариантов ее выполнения.
Сущность изобретения не изменится, если механизм передачи движения будет иным, 0 например, рычажным или зубчатым.
На платформе 2 по обе стороны от рамы 1 размещены грузонесущие -элементы рольганга 21, на который устанавливается тара 22 с грузом.
Устройство работает следующим образом.
После остановки мобильного транспортного средства у адреса разгрузки включением электродвигателя привода 5 обеспечи40 вается выдвижение, например, влево (фиг. 5) направляющей рамы 3 относительно опорной рамы 1. Одновременно происходит синхронное выдвижение влево каретки 4 относительно направляющей рамы 3.
В результате взаимодействия упора 10 с собачкой 6 обеспечивается ориентирование двухплечего коромысла 14 в положение, при котором толкатель 19 оказывается в нижнем положении, а толкатель 20 в верхнем положении. При дальнейшем выдвижении каретки 4 толкатель 20 сталкивает тару 22 BjieBO - на приемный рольганг. Операция сталкивания заканчивается при подходе упора 11 к правой стороне собачки 8. После этого дается команда на реверс электро55 двигателя привода 5 и каретка 4 возвращается в исходное положение. При этом толкатель 19, находящийся в нижнем положении, проходит под тарой, оставляя ее на приемном рольганге.
При выполнении операции загрузки тары слева на рольганг 21 (фиг. 6) выдвижение каретки 4 и ориентация коромысла-14 происходит аналогично вы1пеописанному. При этом толкатель 9 снова проходит под тарой, оказываясь за ее левым торном. Выдвижение каретки 4 происходит до того положения, при котором упор II оказывается с левой стороны собачки 8. После поступления команды на реверс электродвигателя приво да 5 собачка 8 отклоняет упор I1 и двух- .плечее коромысло 14 переводится в второе фиксированное положение, при котором толкатель 19 оказывается в верхнем положении. При дальнеЙ1пем дви жении каретки 4 толкатель 19 захватывает тару 22, загружая ее на рольганг 21 мобильного транспортного средства. После возврата каретки 4 в исходное положение (фиг. 7) электродви- гатель привода 5 отключается.
Операции по перегрузке тары на приемный рольганг, находящийся справа от сталкивающего перегрузочного устройства (фиг. 8), и загрузка ее обратно (фиг. 9) осуществляются аналогично вышеописанным,: с той лищь разницей, что при сталкивани Г: упор 11 взаимодействует с собачкой 9, обес-. печивая подъем толкателя 19 при прямом, ходе каретки 4, а при загрузке упор 10 взаимодействует с собачкой 8, обеспечивая; подъем толкателя 20 при обратном ходе ка-; ретки 4..
Продолжительность хода каретки 4 обес-. печивается сигналом управления, подаваемым на привод 5, и соответствующим виду технологической операции: загрузка или разгрузка.
0
Формула изобретения
. Сталкивающее перегрузочное устройство для обслуживания транспоргного средства, включающее опорную раму, выдвижную поггерек перемещения транспортного средства каретку, на которой щарнирно установлен сталкивающий элементе толкателями, и средство переключения сталкивающего элемента, отличающееся тем, что, с; целью повышения производительности, на- дежности работы и обеспечения двухсторон-, ней подачи тары, выдвижная каретка уста- новлена посредством смонтированной на опорной раме подвижной поперек транспорт5 кого средства рамы, а сталкивающий элемент выполнен в виде коромысла, по концам которого смонтированы толкатели, при этом средство переключения сталкивающего элемента выполнено в виде поворотных упоров, щарнирно установленных на выдвижной
0 каретке в двух вертикальных плоскостях и связанных с плечами коромысла, и шарнир- но смонтированные на подвижной раме с возможностью взаимодействия с поворотными упорами двух пар собачек, каждая
5 пара которых расположена в одной из вер-.
.тикальных плоскостей, проходящих через поворотные упоры, лричем собачки в каждой
:паре установлены с возможностью поворота
в одну сторону, а собачки, расположенные
в разных плоскостях, - в противоположные
0 стороны.
2. Устройство по п. 1, отличающееся тем, что поворотные упоры связаны с плечами коромысла посредством жестко соединенных одними концами с поворотными упорами рычагов и выполненных в коромысле пазов
5 для размещения свободных концов рычагов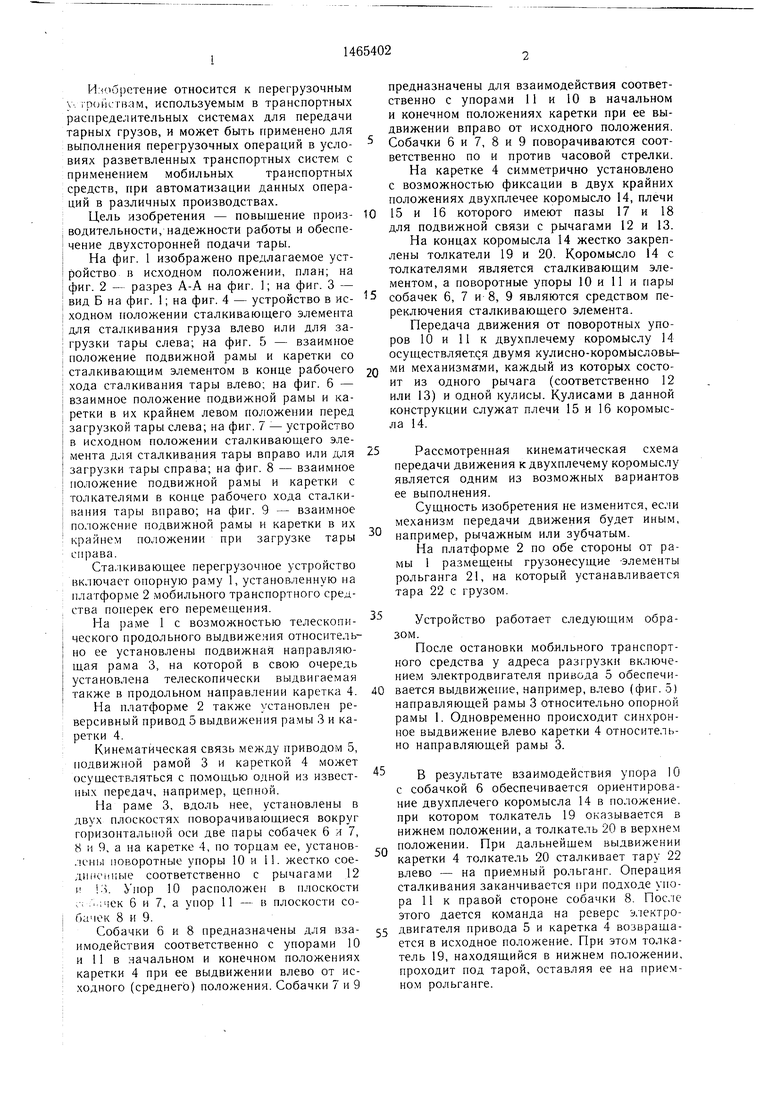
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное устройство | 1990 |
|
SU1738603A1 |
| БЛОК ДЛЯ СЪЕМА И УКЛАДКИ ГРУЗОВ ЛИТЕЙНЫХ ФОРМ | 1990 |
|
RU2014950C1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для поштучной выдачи грузов с гравитационного рольганга | 1982 |
|
SU1084213A1 |
| Устройство для выдачи штучных изделий из штабеля | 1974 |
|
SU512145A1 |
| Устройство для подачи штучных грузов на конвейер | 1976 |
|
SU621629A1 |
| Линия для сборки узлов | 1989 |
|
SU1722771A1 |
| Установка для сушки табачных листьев | 1985 |
|
SU1294338A1 |
Изобретение относится к перегрузочным устр-вам, используемым в транспортных распределительных системах для передачи тарных грузов, и позволяет повысить произв-сть, надежность работы и обеспечить двухстороннюю подачу тары. Опорная рама (Р) I установлена на платформе 2 транспортного средства поперек его перемещения. На Р I с возможностью телескопического продольного выдвижения относительно нее установлена подвижная направляющая Р 3. В,:1.оль Р 3 установлены в двух плоскостях поворачивающиеся вокруг горизонтальной оси две пары собачек (С) 6 и 7, 8 и 9. В каждой паре С установлены с возможностью поворота в одну сторону, а С, расположенные в разных плоскостях, - в противоположные стороны. На Р 3 размещена телескопически выдвигаемая в продольно.ч направлении каретка4. На ней щарнирно установлен сталкивающий элемент в виде коромысла (К) 14, плечи 15, 16 которого имеют пазы 17 и 18 для подвижной связи с рычагами 12 и 13. На концах К 14 смонтированы толкатели 19, 20. Средство переключения К 14 выполнено в виде поворотных упоров 10, 11, жестко связанных с рычагами 12 и 13. Упор 10 расположен в плоскости С 6, 7, упор 11 - в плоскости С 8, 9. Движение от упоров 10 и 11 к К 14 осуществляется двумя кулисно-коромысловыми .механизмами, состоящими из рычагов 12, 13 и кулисы. В качестве последних служат плечи 15, 16 К 14 Одновременно с выдвижением Р 3 влево относительно Р 1 каретка 4 выдвигается влево относительно Р 3. При этом упор 10 взаи.модействует с С 6, толкатель 19 К 14 оказывается в нижнем положении, толкатель 20 К 14 - в верхнем. При дальнейщем выдвижении каретки 4 толкатель 20 сталкивает тару влево. При подходе упора 11 к правой стороне С 8 операция сталкивания заканчивается. 1 3. п. ф-лы, 9 ил. с (Л 4 05 ел 4;: О ю
2/
(i/ej
(S
w
фа г. 6 6
фиг. 5
7
д (fu.3
фиг.7
//
фиг.8
71
| Сталкивающее перегрузочное устройство тележечных конвейеров | 1980 |
|
SU899444A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
