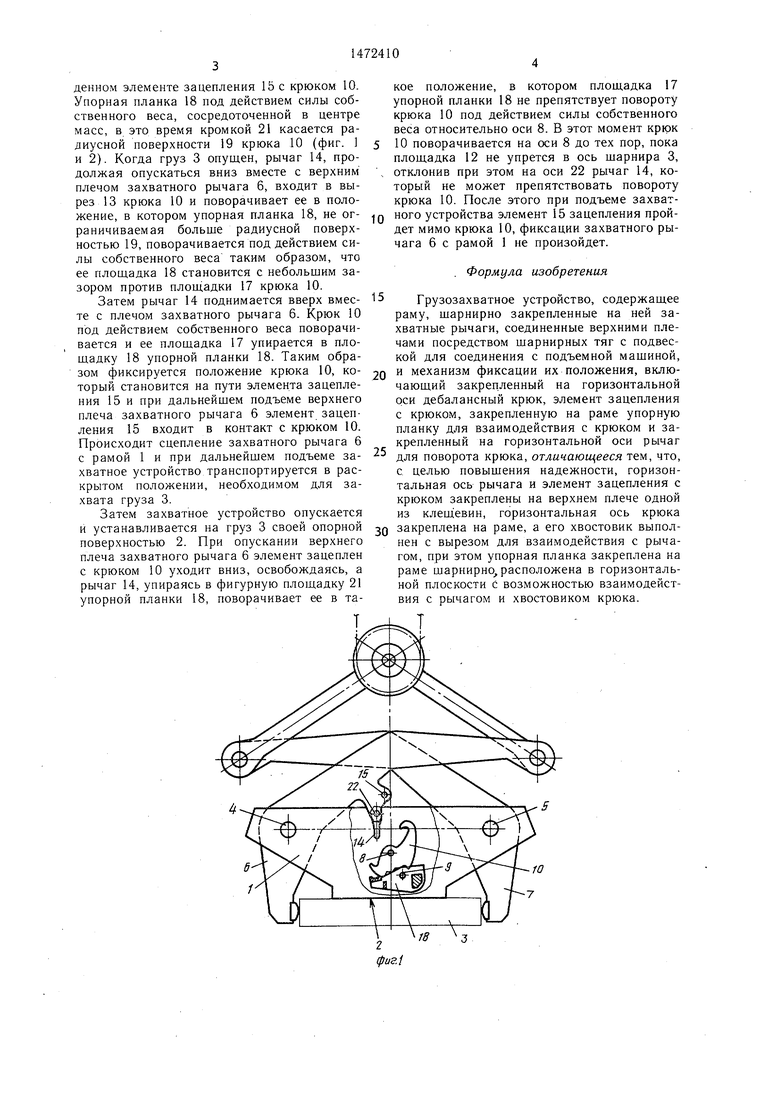
денном элементе зацепления 15 с крюком 10. Упорная планка 18 под действием силы собственного веса, сосредоточенной в центре масс, в это время кромкой 21 касается радиусной поверхности 19 крюка 10 (фиг. 1 и 2). Когда груз 3 опущен, рычаг 14, продолжая опускаться вниз вместе с верхним плечом захватного рычага 6, входит в вырез 13 крюка 10 и поворачивает ее в положение, в котором упорная планка 18, не ограничиваемая больше радиусной поверхностью 19, поворачивается под действием силы собственного веса таким образом, что ее площадка 18 становится с небольщим зазором против площадки 17 крюка 10.
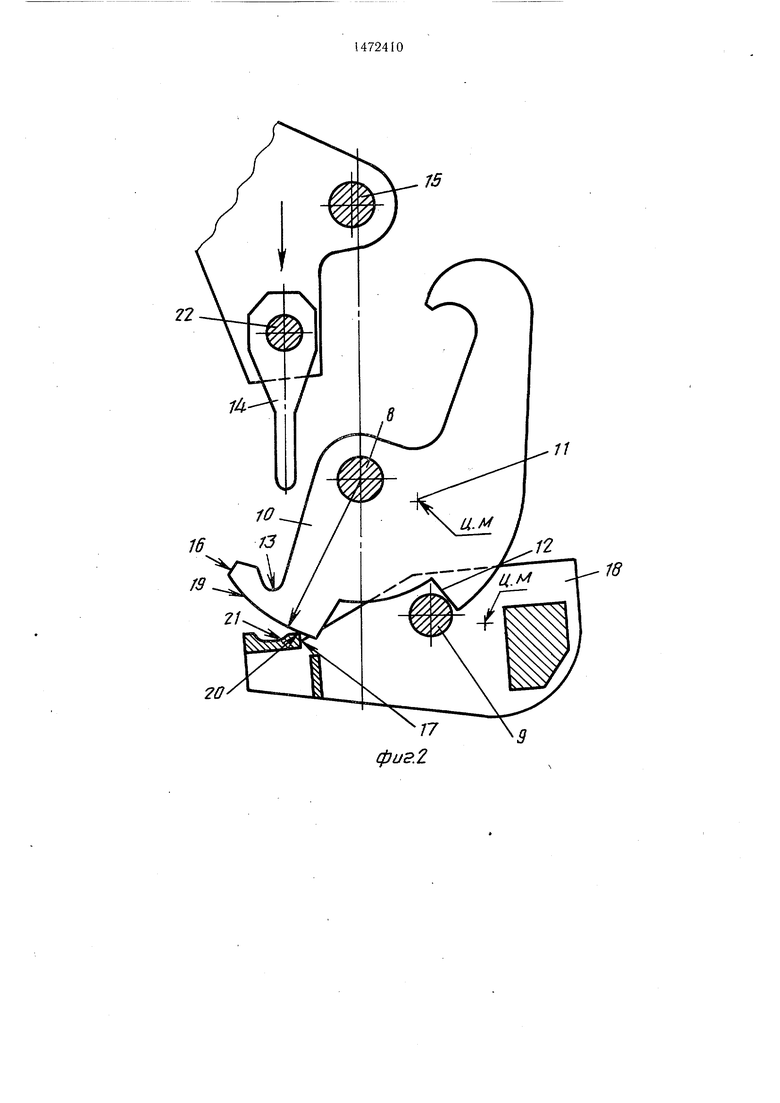
Затем рычаг 14 поднимается вверх вместе с плечо.м захватного рычага 6. Крюк 10 под действием собственного веса поворачивается и ее площадка 17 упирается в площадку 18 упорной планки 18. Таким образом фиксируется положение крюка 10, который становится на пути элемента зацепления 15 и при дальнейщем подъеме верхнего плеча захватного рычага 6 элемент зацепления 15 входит в контакт с крюком 10. Происходит сцепление захватного рычага 6 с рамой 1 и при дальнейшем подъеме захватное устройство транспортируется в раскрытом положении, необходимом для захвата груза 3.
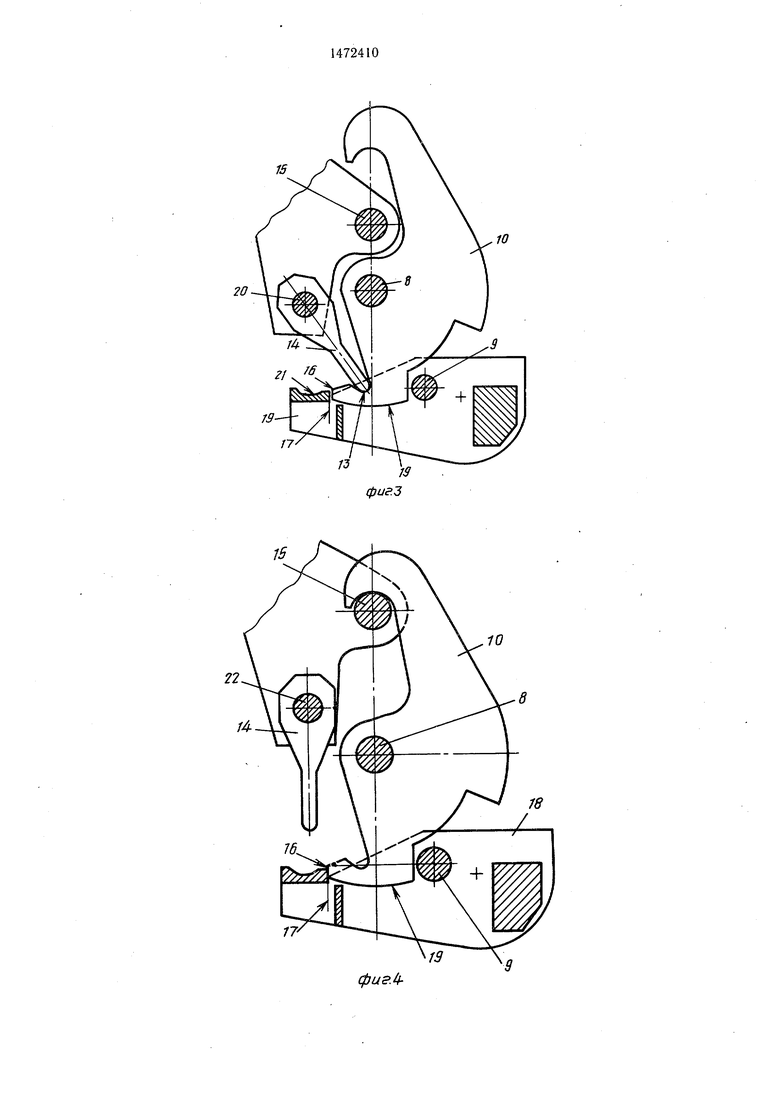
Затем захватное устройство опускается и устанавливается на груз 3 своей опорной поверхностью 2. При опускании верхнего плеча захватного рычага 6 элемент зацеплен с крюком 10 уходит вниз, освобождаясь, а рычаг 14, упираясь в фигурную площадку 21 упорной планки 18, поворачивает ее в та
5
0
5
0
кое положение, в котором площадка 17 упорной планки 18 не препятствует повороту крюка 10 под действием силы собственного веса относительно оси 8. В этот момент крюк 10 поворачивается на оси 8 до тех пор, пока площадка 12 не упрется в ось щарнира 3, отклонив при этом на оси 22 рычаг 14, который не может препятствовать повороту крюка 10. После этого при подъеме захватного устройства элемент 15 зацепления пройдет мимо крюка 10, фиксации захватного рычага 6 с рамой 1 не произойдет.
. Формула изобретения
Грузозахватное устройство, содержащее раму, щарнирно закрепленные на ней захватные рычаги, соединенные верхними плечами посредством щарнирных тяг с подвеской для соединения с подъемной мащиной, и механизм фиксации их положения, включающий закрепленный на горизонтальной оси дебалансный крюк, элемент зацепления с крюком, закрепленную на раме упорную планку для взаимодействия с крюком и закрепленный на горизонтальной оси рычаг для поворота крюка, отличающееся тем, что, с целью повыщения надежности, горизонтальная ось рычага и элемент зацепления с крюком закреплены на верхнем плече одной из , горизонтальная ось крюка закреплена на раме, а его хвостовик выполнен с вырезом для взаимодействия с рычагом, при этом упорная планка закреплена на раме шарнирнр, расположена в горизонтальной плоскости с возможностью взаимодействия с рычагом и хвостовиком крюка.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |
| Захват для грузов с отбортовкой | 1990 |
|
SU1766820A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Устройство для подъема длинномерной конструкции в вертикальное положение | 1985 |
|
SU1291542A1 |
| Грузозахватное устройство | 1990 |
|
SU1801921A1 |
| Контейнер для сыпучих грузов | 1980 |
|
SU982986A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1986 |
|
SU1384520A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
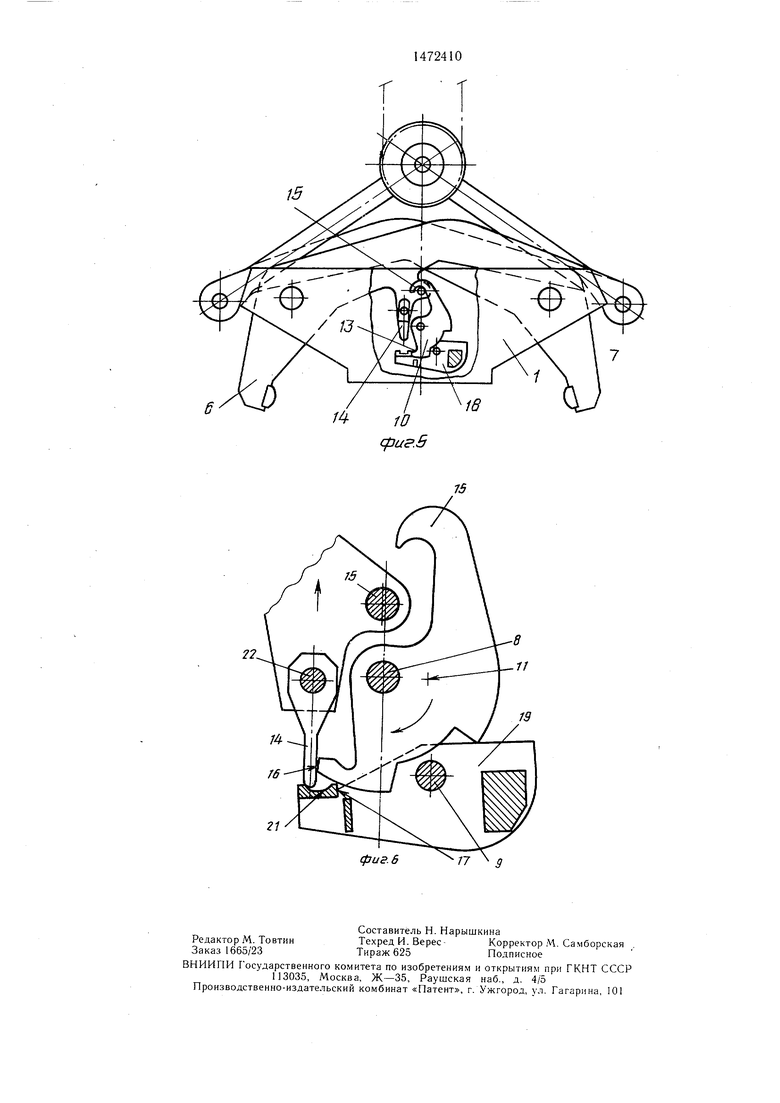
Изобретение относится к подъемно-транспортному оборудованию ,в частности к грузозахватным устройствам. Целью изобретения является повышение надежности. Грузозахватное устройство содержит механизм фиксации положения захватных рычагов 6 и 7, включающий дебалансный крюк 10 с вырезом 13, рычаг 14 и упорную планку 18 для взаимодействия с рычагом 14 и хвостовиком дебалансного крюка 10. 6 ил.
20
75
77
фиа2
15
79
П
15
10
10
8
фигЛ
21
8 11
фив.6
