Изобретение относится к автоматике и вычислительной технике в частности к устройствам, предназначенным для испытаний и исследования динамики аналого-цифрового следящего привода, работающего в реальных условиях с электронной цифровой вычислительной машиной (ЭЦВМ),
Цель изобретения - расширение зоны линейности имитируемого сигнала и повышение надежности -работы устрой ства.
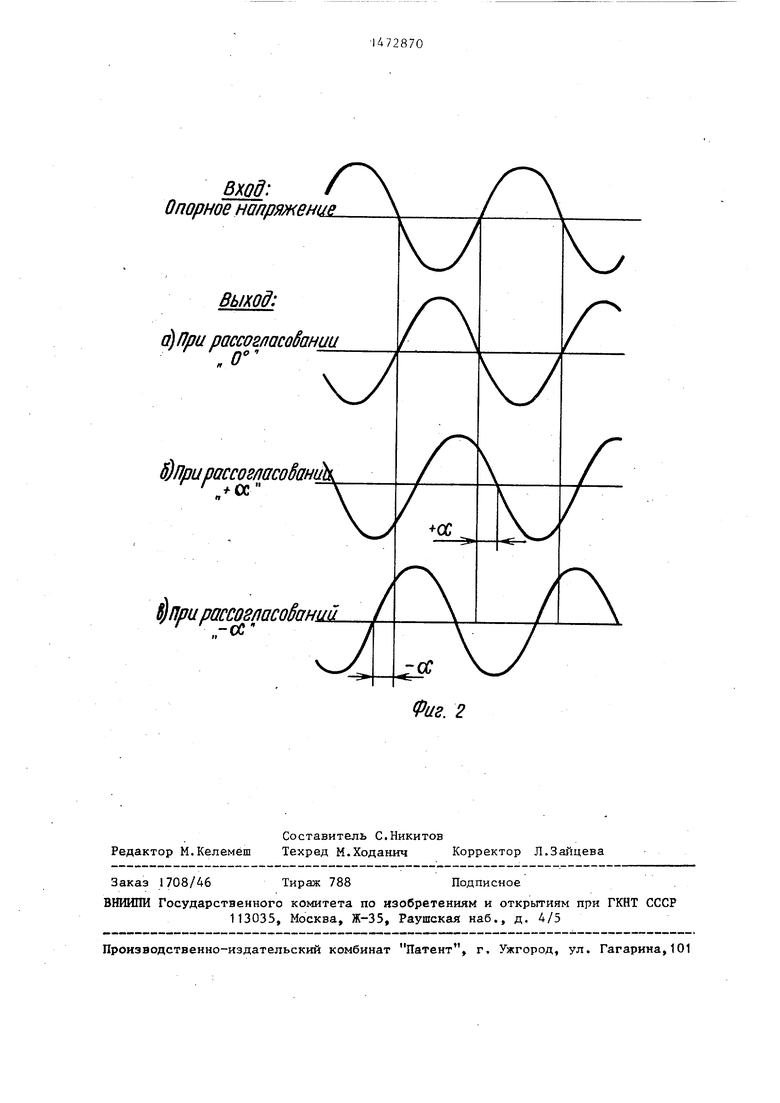
На фиг.1 представлена блок- схема устройства; на - диаграмма его работы.
Устройство содержит аналоговый программный механизм 5 дифференциал 2, фазовращатель 3, блок 4 квантования 5 блок 5 памяти следящий привод 69 датчик 7 угла повороте (вращающий ся трансформатор)з редуктор 8.
При этом блок i квантования состоит из Фазоимпульсного преобразова- зователя 9S цифроаналогового преобразователя 10S генератора 11 опорных напряжений, который содержит генератор 12 высокочастотных колебаний (напримерs мультивибратор), дифференциатор 13з делитель 14 частоты, усилитель 15 мощности, второй делитель б частоты, элементы НЕ 17 и 18, элементы И 19 (на 3 входа) и 20 (на 5 входов).
Блок,5 памяти содержит ключ 219 масштабирующий элемент (резистор) 22 и ключ 23, операционный усилитель 24 с запоминающим элементом (конденсатором) 25 и резистором 26 обратной связи, ключ 27 с масштабирующим элементом (резистором) 28 s компаратор 29 с делителем 30 напряжения, блок 31 односторонней проводимости (диод) и интегратор 32.
Блок 4 квантования функционально предназначен для преобразования ве
15
личины угла сдвига фазы напряжения, поступающего на вход с фазовращателя 3 (величины ошибки), в напряжение -постоянного тока, пропорциональное 5 величине ошибки и квантованное по ,амплитуде и времени.
s
Блок 5 памяти предназначен для запоминания информации о величине Ю ошибки на время ее обновления с тактовой частотой, а также для отключения сигнала ошибки, поступающего от 1 бло-ка 4 квантования, и подключения вместо него сигнала ошибки от датчи-. ка 7 угла поворота (вращающегося трансформатора) при углах поворота ротора фазовращателя 3 более 180 .
Устройство работает следующим образом.
Программа работы вырабатывается в аналоговом программном механизме 1 и вводится в устройство путем поворота первого входного вала дифференциала 2, в результате чего вращение его выходного вала передается на ротор фазовращателя 3, что вызывает сдвиг фазы его выходного напряжения относительно опорного напряжения (фиг.2). Выходное напряжение фазовращателя поступает на вход блока 4 квантования, в котором это напряжение подается на вход Фазоимпульсного преобразователя 9, в котором выделя35 ется прямоугольный импульс с длительностью, пропорциональной углу сдвига фазы (заполняется импульсами высокой частоты, поступающими с генератора 11 опорных напряжений на дру40 гой вход преобразователя). Далее сигнал .ошибки в виде определенного количества импульсов подается на цифроаналоговый преобразователь 10, в котором число импульсов преобра- зуется в цифровой код, а затем - в
20
25
30
J
напряжение постоянного тока, и в таком виде подается на выход блока 4 квантования.
В генераторе- 1 I опорных напряжений, входящем и блок 4 квантования, высокочастотные колебания вырабатываются в генераторе 12 и подаются через дифференциатор 13 на вход фа- зоимпульсного преобразователя 9. С целью увеличения помехоустойчивости всего устройства частота необходимого опорного напряжения получается путем деления высокочастотных колеба ний в делителе 14 частоты и последую щего усиления до необходимого уровня в усилителе 15 мощности, с выхода ко торого это напряжение подается на вход фазоимпульсного преобразователя 9 и выход блока квантования для возбуждения фазовращателя, в блок памяти 5 и датчик 7 угла поворота (вращающийся трансформатор). Кроме того, с выхода первого делителя 14 частоты сигнал подается на второй делитель 16 частоты (для получения тактовой частоты ЭЦВМ) и на вход логического элемента НЕ 17, с делителя 16 частоты сигналь поступают на вход элемента НЕ 18 и элементов И 19 и 20, в результате чего на выходе элемента И 19 получается прямоугольный импульс для управления запоминанием информации на время ее обновления, который подается через выход блока 4 квантования а вход блока 5 памяти, а на выходе элемента 20 получаются прямоугольные импульсы тактовой частоты реальной ЭЦВМ, которые выдаются на вход фазоимпульсного преобразователя 9 и вход цифроаналогового преобразователя 10 для их периодического облу чения (установки в исходное положение) .
Напряжение постоянного тока, пропорциональное ошибке привода, с выхо да блока 4 квантования подается на вход блока 5 памяти, в котором оно поступает через нормально закрытые контакты ключа 21, масштабирующий элемент (резистор) 22, нормально закрытые контакты ключа 23 на инвертирующий вход операционного усилителя 24 с запоминающим элементом (конденсатором) 25 и резистором 26 обратной связи.
С выхода операционного усилителя это напряжение (в виде управляющего напряжения постоянного тока) поступа728704
ет на выход блока памяти и соответственно на вход следящего привода 6, приводя его в движение. движение направлено в сторону уменьшения угла рассогласования, что вызывает уменъ- шение сдвига фаз выходного напряжения фазовращателя 3 относительно его напряжения питания, и в динамике
10 на выходе дифференциала 2 все время происходит вычитание движения привода из движения аналогового программного механизме, а рачность вызывает поворот ротора фазовращателя на угол, 15 соответствующий величине ошибки в замкнутой системе регулирования.
При этом в диапазоне углов поворота ротора фазовращателя 3 в пределах +180° амплитуда сигнала, снимаемого
20 с датчика 7 угла поворота вращающегося трансформатора и поступающего на вход блока памяти, меньше порога срабатывания ключа 27 и не оказывает действия на величину его выходного
25 напряжения.
При углах поворота ротора фазовращателя 3 более +180° амплитуда сигнала датчика 7 угла поворота (вращающегося трансформатора) возрастает и
30 становится больше порога срабатывания ключа 27 в блоке памяти, т.е. сигнал с датчика угла поворота поступает на компаратор 29, порог срабатывания которого устанавливается
35 .с помощью делителя 30 напряжения и |Через блок 31 односторонней проводимости (диод) подается на управляющий вход ключа 27,- осуществляющего фаэо- чувствительное выпрямление опорного
40 напряжения, и с его выхода через масштабирующий элемент 28 подается на инвертирующий вход операционного усилителя 24. Одновременно этот сигнал через интегратор 32 подается на
45 управляющий вход ключа 21, который, срабатывая, обрывает входной сигнал от блока 4 квантования, при этом сохраняется полярность выходного напряжения на выходе операционного усили-50 теля 24, предшествующая моменту включения , и выдается максимальное выходное напряжение в диапазоне углов поворота датчика (вращающегося трансформатора) в пределах +180°, рас- L
55 ширяя зону линейности характеристик устройства в i раз, где i - передаточное число редуктора 8.
Предлагаемое устройство позволяет расширить зону линейности сигнала
на выходе имитатора и повысить надежность работы устройства за счет применения бесконтактных датчиков и электронной схемы с бесконтактным преобразованием сигнала ошибки в цифровой сигнал, квантованный по уровню и по времени.
Формула иэобратения
I. Устройство для имитации цифрового сигнала ошибки следящего привода, содержащее аналоговый программный механизм, следящий привод и дифференциал, который кинематически связан входами соответственно с аналоговым программным механизмом и следящим приводом, а также блок квантования и блок памяти, от личаю- щ е е с я тем, что, с целью расширения зоны линейности имитируемого сигнала и повышения надежности работы устройства, в него введены редуктор,
второго дел. - ча ы, выход генератора высокочастотных колебаний соединен с управляющим входом первого делителя частоты, вход установки которого соединен с шиной нулевого потенциала, первый, второй и третий входы первого элемента И соединены соответственно с первым, вторым и третьим входами второго элемента И и , третьим и четвертым выходами разрядов второго делителя частоты; первый и второй входы установки которого соединены с шиной нулевого по5 тенциала, выход второго элемента И связан с тактовыми входами фазоим- пульсного и цифроаналогового преобразователей, выход усилителя мощности подключен к входу опорного напря0 жения фазоимпульсного преобразователя и второму выход пока квантования, первый выход кс, орого связан с выходом цифроаналогового преобразователя, выход первого элемента И под
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| ФАЗОИМПУЛЬСНЫЙ ДЕМОДУЛЯТОР | 1992 |
|
RU2047269C1 |
| Следящая система с ограниченным углом поворота выходного вала | 1989 |
|
SU1783469A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| Следящий привод | 1982 |
|
SU1012198A1 |
| Система связи с относительной фазовой и фазоимпульсной модуляцией | 1987 |
|
SU1559421A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЦИФРОВОЙ КОД | 1971 |
|
SU436438A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Устройство для регистрации одиночных ударов | 1987 |
|
SU1479878A1 |
Изобретение относится к области автоматики и вычислительной техники ,в частности, к устройствам для испытаний и исследования динамики следящих приводов. Цель изобретения состоит в упрощении конструкции, повышении точности и надежности устройства за счет применения бесконтактных датчиков и электронной схемы с бесконтактным преобразованием выходного сигнала ошибки в цифровой сигнал, квантованный по уровню и по времени, а также расширение зоны линейности за счет введения электронной схемы с двухсчетной системой управления. Устройство содержит аналоговый программный механизм 1, дифференциал 2, фазовращатель 3, блок квантования 4, блок памяти 5 и следящий привод 6, а также датчик угла поворота (вращающийся трансформатор) 7, кинематически связанный с фазовращателем с помощью редуктора 8. 2 з.п.ф-лы, 2 ил.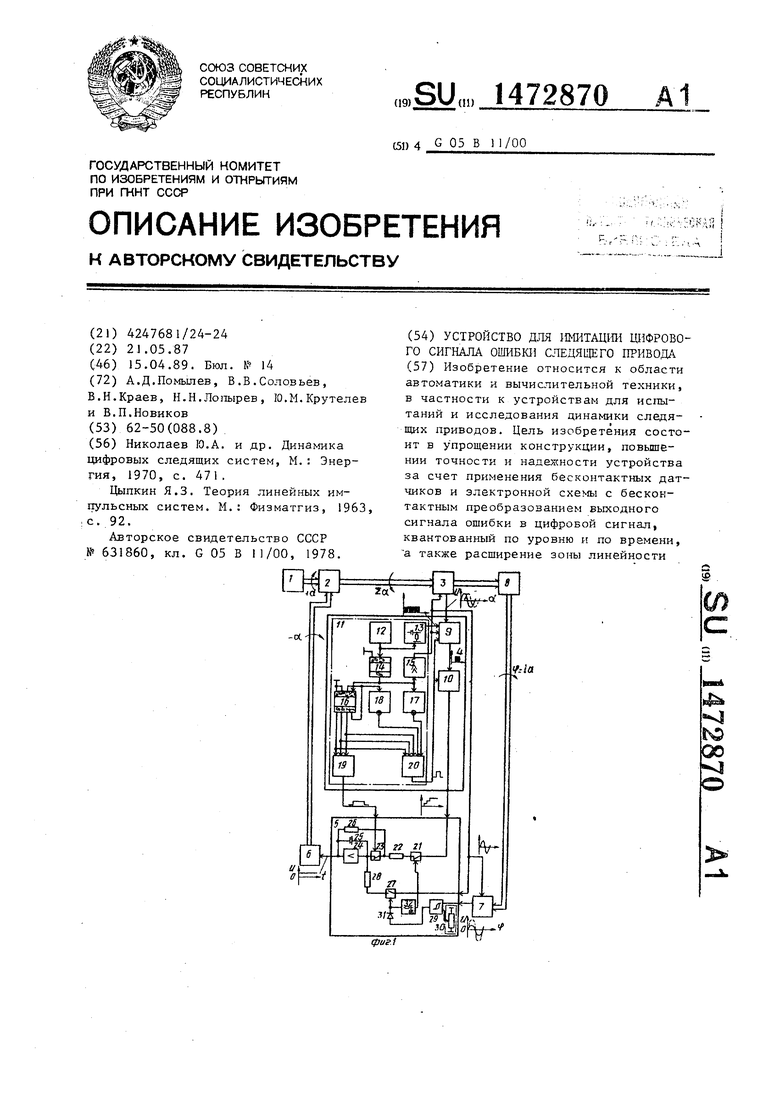
фазовращатель и датчик угла поворота, 25 соединен к третьему выходу блоха квантокинематически соединенный через редуктор с выходным валом дифференциала, на котором размещен фазовращатель, выход которого подключен к информационному входу блока квантования, первый выход блока квантования соединен с информационным входом блока памяти, подключенного управляющим входом к выходу датчика угла поворота, второй выход блока квантования соединен с входами опорного напряжения фазовращателя, датчика угла поворота и блока памяти третий выход блока квантования подключен к тактовому входу блока памяти, выход которого соединен с входом следящего привода,
НЕ, выходом первого делителя частоты 55 Усилителя, тактовый вход блока памя- и первым управляющим входом второго ти подключен к управляющему входу делителя частоты, первый выход кото-- второго ключа, выход блока односто- рого соединен с входом второго эле- ронней проводимости соединен с уп- мента НЕ и вторым управляющим входом равляющим входом третьего ключа.
вания, информационный вход фазоимпульсного преобразователя связан с информационным входом блока квантования.
ключ, первый масштабирующий элемент, второй ключ и операционный усилитель, выход которого через запоминающий конденсатор подключен к выходу второго ключа, выход операционного
усилителя связан с выходом блока памяти и через резистор обратной связи - с входом второго ключа, информационный вход блока памяти соединен с информационным входом первого ключа, управляющий вход которого подключен к выходу интегратора, управляющий вход блока памяти подсоединен к первому входу компаратора, второй вход которого связан с выхоного напряжения блока памяти через последовательно соединенные третий ключ и второй масштабирующий элемент подсоединен к входу операционного
Вход: Опорное напряжение.
Выход: а) При рассогласовании
б)Лрирассомасобвни
т Д,
§При рассогласований.
Фиг. 2
| Николаев Ю.А | |||
| и др | |||
| Динамика цифровых следящих систем, М.: Энергия, 1970, с | |||
| КОЛЕНЧАТО-РЫЧАЖНЫЙ ПРЕСС ДЛЯ ЦЕМЕНТНЫХ ЧЕРЕПИЦ, ПЛИТОК И Т.П. С МНОГОКРАТНЫМ НАЖАТИЕМ НА ФОРМУЕМУЮ МАССУ | 1922 |
|
SU471A1 |
| Цыпкин Я.З | |||
| Теория линейных импульсных систем | |||
| М.: Физматгиз, 1963, с | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Устройство для имитации цифрового сигнала ошибки следящего привода | 1976 |
|
SU631860A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
