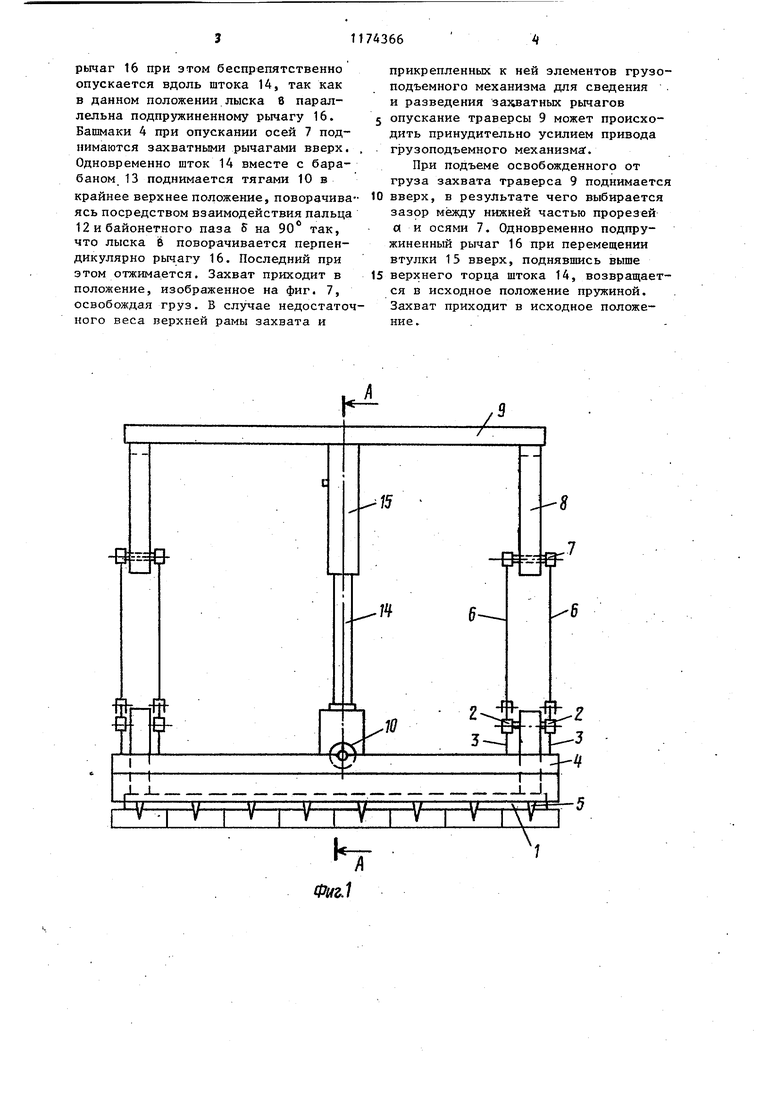
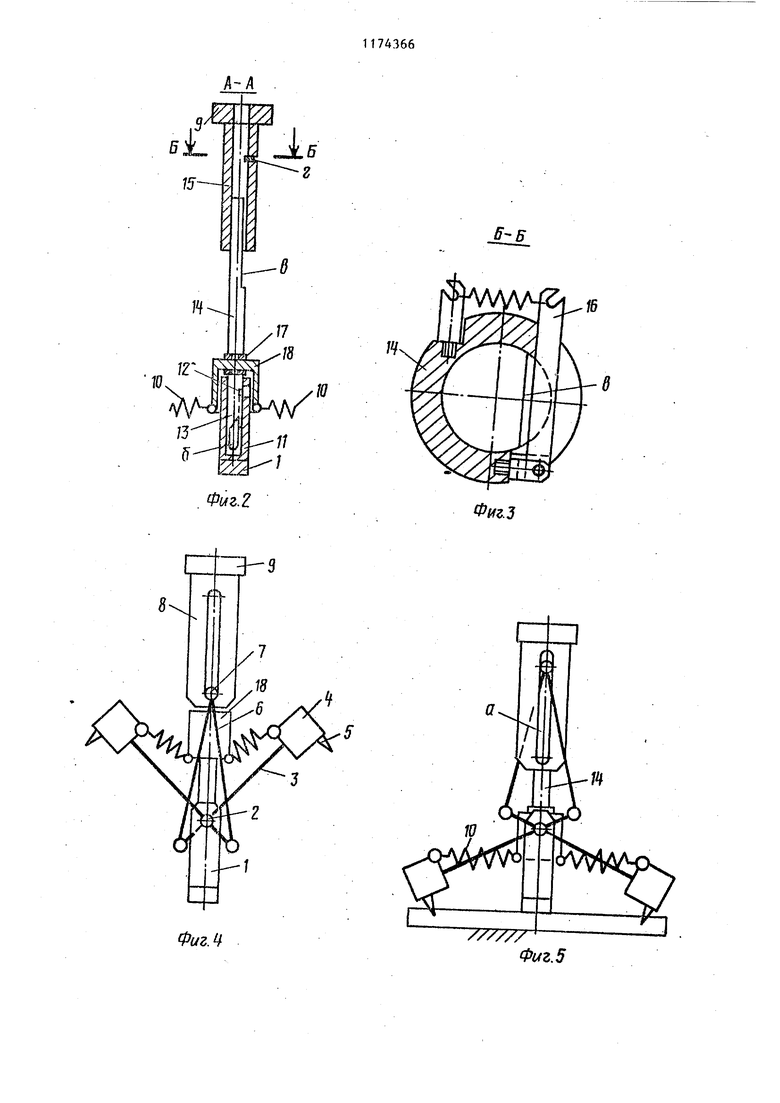
Изобретение относится к подъемн транспортному оборудованию, в частности к грузозахватным устройствам клещевого типа, и может быть исполь зовано для захвата грузов во всех отраслях народного хозяйства с врезанием или без врезания захватных органов в материал груза Цель изобретения - повышение производительности. На фиг, 1 изображен захват в момент захвата груза, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2} на фиг. 4 - захват в исходном положении (при переносе освобожденного от гру за) , вид сбоку; на фиг. 5 - захват в момент установки на груз; на фиг. 6 - захват в момент, подъема груза; на фиг. 7 - захват в момент освобождения от груза. Автоматический захват содержит раму 1, на которой шарнирно устано лены на осях захватные рычаги 3. Захватные рычаги 3 попарно соедине ны башмаками 4, снабженными захват ными элементами - штырями 5, и шар нирно связаны с тягами 6, оси 7 которых размещены с возможностью свободного перемещения в прорезях а , выполненных в коочштейнах 8 тр весы 9. Башмаки 4 посредством прикрепленных к ним подпружиненных тяг 10 связаны с механизмом фиксац захватных рычагов в раскрытом поло жении. Последний содержит направляющую втулку 11, закрепленную в средней части рамы 1 и снабженную на внутренней поверхности паль цем 12 для взаимодействия с профилированной поверхностью в виде байонетного паза б барабана 13, которьй расположен на нижнем конце штока 14. Верхний конец штока 14 выполнен с лыской В , представляющей собой упор, и расположен в направляющей втулке 15, укрепленно на траверсе 9. Направляющая втулка 15.выполнена с горизонтальной прорезью г J в которо установлен фи сатор, представляющий собой подпру жиненный рычаг 16, В средней части штока 14 между упорными кольцами 17 свободно посажен стакан 18, к которому шарнирно прикреплены подпружиненные тяги 10, Автоматический захват работает следующим образом. К грузоподъемной машине захват подвешивается на траверсу 9. В исходном положении (фиг. 4) башмаки 4 подняты захватными рычагами 3 вверх и удерживаются в таком положении усилия ми подпружиненных тяг 10. При этом шток 14 механизма фиксации находится в своем крайнем верхнем положении так, что точки закрепления тяг 10 на стакане 18 подняты выше уровня осей 2, палец 12 упирается в нижний конец байонетного паза С , а лыска В развернута перпендикулярно подпружиненному рычагу 16, находящемуся с гарантированным зазором над верхним торцом штока 14. При опускании захвата на груз рама 1 в момент касания с грузом останавливается., а траверса 9 продолжает свое движение. Вместе с траверсой 9 перемещается вниз направляющая в.тулка 15, подпружиненный рычаг 16 которой нажимает на верхний торец штока 14 и опускает его вниз вместе со стаканом 18. Как только точки закреппения подцружиненных тяг 10 на стакане 18 опускаются ниже уровня осей 2, башмаки 4 под действием собственного веса и усилия растяну-тых тяг 10 ускоряются вниз и штыри 5 врезаются в материал груза. При этом шток 14 вместе с барабаном 13 перемещается в свое крайнее нижнее положение, повернувшись за счет взаимодействия байонетного паза 5 с.пальцем 12 направляющей втулки 11 на 90 так, что лыска В разворачивается параллельно ры-. чагу 16.. Грузоподъемный механизм останавливается и захват приходит в . положение, изображенное на фиг. 5. При подъеме груза траверса 9 (фиг. 6) грузоподъемным механизмом поднимается вверх. При этом.движении выбирается зазор между осями 7 и нижней частью прорезей о, кронштейнов 8, происходит надежный захват груза, отрыв от его площадки ипереме1Цение. При освобождении захвата от груза траверса 9 под действием собственного веса и веса прикрепленлых к ней элементов грузоподъемного механизма опускается вниз до соприкосновения верхних частей прорезей . а с осями,7, которые также начинают; перемещаться вниз. Подпружиненный
рычаг 16 при этом беспрепятственно опускается вдоль штока 14, так как в данном положении лыска 8 параллельна подпружиненному рычагу 16. Башмаки 4 при опускании осей 7 поднимаются захватными рычагами вверх. Одновременно шток 14 вместе с барабаном 13 поднимается тягами 10 в крайнее верхнее положение, поворачиваясь посредством взаимодействия пальца 12 ибайонетного паза 5 на 90 так, что лыска 6 поворачивается перпендикулярно рычагу 16. Последний при этом отжимается. Захват приходит в положение, изображенное на фиг. 7, освобождая груз. В случае недостаточного веса верхней рамы захвата и
прикрепленных к ней элементов грузоподъемного механизма для сведения и разведения захватных рычагов
5 опускание траверсы 9 может происходить принудительно усилием привода грузоподъемного механизма:.
При подъеме освобожденного от груза захвата траверса 9 поднимается
10 вверх, в результате чего выбирается зазор между нижней частью прорезей а и осями 7. Одновременно подпружиненный рычаг 16 при перемещении втулки 15 вверх, поднявшись выше
15 верхнего торца штока 14, возвращается в исходное положение пружиной. Захват приходит в исходное положение , .
Фиг.г
Б-Б
Фиг.З
Фиг. Ч
Фиг. 5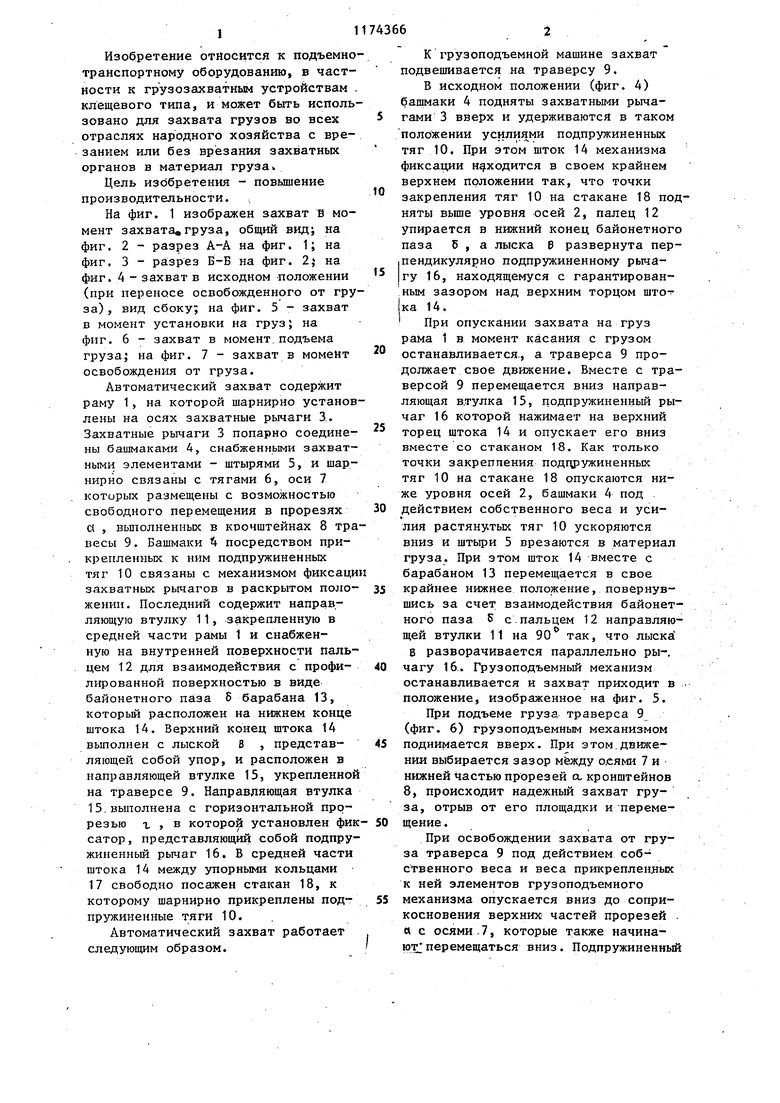
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
| Захватное устройство для раскрывающихся емкостей | 1983 |
|
SU1129168A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
АВТОМАТИЧЕСКИЙ ЗАХВАТ, содержащий раму с шарнирно закрепленными на ней захватными рычагами, нижние плечи которых снабжены за- . хватными элементами, а верхние кинематически связаны с траверсой, навешиваемой на грузоподъемную машину, И механизм фиксации захватных рычагов в раскрытом положении, включающий в себя закрепленную на раме направляющую втулку с размещенным в ней с возможностью возвратно- . . поступательного перемещения штоком, барабан с профилированной поверхностью, установленный с возможностью взаимодействия с пальцем, и взаимосвязанный с рамой поворотньй относительно вертикальной оси упор установленный с возможностью взаимодействия со смонтированным на траверсе фиксатором, отличающийс я .тем, что, с целью повышения производительности, механизм фиксации снабжен закрепленной на траверсе дополнительной направляющей втулкой с горизонтальной прорезью, в которой размещен фиксатор, представляющий собой подпружиненный рычаг, шток установлен в направляющих втулках с возможностью поворота, на нижнем его конце расположен барабан, а верхний выполнен с лыской, обраВ зующей упомянутый упор, при этом палец закреплен на внутренней поверхС ности ОСНОВНОЙ втулки, траверса выполнена с вертикальными прорезями, а автоматический захват снабжен размещенными в прорезях траверсы ОСЯМИ, шарнирно соединенными с осями тягами, нижние концы которых шарнир 1 но соединены с верхними плечами 4 захватных рычагов, и установленным . на штоке с возможностью вращения о: вокруг его ОСИ стаканом, соединенным CR подпружиненными .тягами с нижними плечами захватных рычагов.
| Автоматический захват для штучных грузов | 1976 |
|
SU650947A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
