Изобретение относится к автоматке и может найти применение в системах управления нестационарными объектами,подверженными воздействи неконтролируемых возмуидений.
Известна самонастраивающаяся система для регулирования объектов с запаздыванием, содержащая последовательно соединенные эталонную модель, блоки сравнения, первый умножитель, первый усилитель, первый интегратор и второй умножитель вхорой вход которого соединен с выходом объекта регулирования, вторым входом первого умножителя и вторым входом блока сравнения, а входы объекта регулирования и эталонной модели объединены, а также последовательно соединенные блок задержки, третий умножитель, второй усилитель, второй интегратор, четвертый умножитель, сумматор, выход которого соединен со вторым входом объекта регулирования, а вход - с выходом четвертого умножителя, первый вход третьего умножи.теля соединен со вторым входом четвертого умножителя, а второй вход с выходом блока сравнения 1.
Однако этой системе присущи недостаточно высокие точность и быстродействие при управлении нестционарными объектами, объясняющиеся тем, что в процессе управления не учитывается возможный дрейф параметров объекта управления.
Наиболее близкой по технической сущности к предлагаемой является система автоматического управления содержащая сумматор объекта, подключенный выходом ко входам объекта управления и модели объекта управления, первый выход которой подключен через блок задержки модели к первому входу сумматора модел выход которого соединен со вторым входом модели объекта управления, вторым выходом соединенной с первы входом сумматора ощибки идентификации, . второй вход которого подключен к выходу объекта управления а управлякхций вход сумматора ошибки идентификации соединен с первым выходом блока управления, первый вход сумматора ошибки управления соединен с выходом блока задающих воздействий и с входом блока управления, второй выход которого подключен к управляющему входу сум матора ошибки управления, вторым входом соединенного с выходом объета управления, и второй вход сумматора объекта подключен через блок задержки объекта к информационному выходу объекта управления Г2 .
Однако известной системе автоматического управления также присущи недостаточно высокие точность и быстродействие, объясняющиеся отсутствием возможности коррекции модели по мере изменения параметров объекта управления и задающего воздействия.
Целью изобретения является повыщение точности и быстродействия.
Указанная цель достигается тем, что в предлагаемое устройство введены сдвоенный блок умножения, сдвоенный блок квадратора, сдвоенный блок сумматора, сдвоенный блок деления, сдвоенный блок маштабных коэффициентов, блок умножения и блок задания стоимости управляющих воздействий, причем выход сумматор ощибки идентификации подключен к первому входу сдвоенного блока умножения, второй вход которого соедине1 с выходом сумматора объекта и первым входом сдвоенного блока квадратора, первым выходом подкл оченного к первому входу сдвоенного блока сумматора, первый выход сдвоенного блока умножения подключен к первому входу сдвоенного блока деления, второй вход которого соединен с первым выходом сдвоенного блока сумматора, а третий и четвертый входы сдвоенного блока деления подключены соответственно ко второму выходу сдвоенного блока сумматора и ко второму выходу сдвоенного блока умножения, третий вхо которого подключен к выходу сумматора модели и второму входу сдвоенного блока квадратора, четвертый вход сдвоенного блока умножения подключен к первому входу блока умножения и выходу блока задания стоимости управляющих воздействий, выход сумматора ощибки управления соединен с пятым входом сдвоенного блока умножения, второй выход сдвоного блока квадратора соединен со вторым входом блока умножения, выхдом подключенного ко второму входу сдво€;нного блока сумматора, первый и второй выходы сдвоенного блока дления соединены соответственно с пвым и вторым входами сдвоенного блока масщтабных коэффициентов, первый выход которого подключен ко второму входу сумматора модели, а второй выход сдвоенного блока масштабных коэффициентов подключен к первому входу сумматора объекта.
Такое соединение элементов позволяет в процессе управления постоянно подстраивать коэффициенты модели объекта управления и тем самыг учитывать дрейф параметров объекта управления и задающеговоздействия.
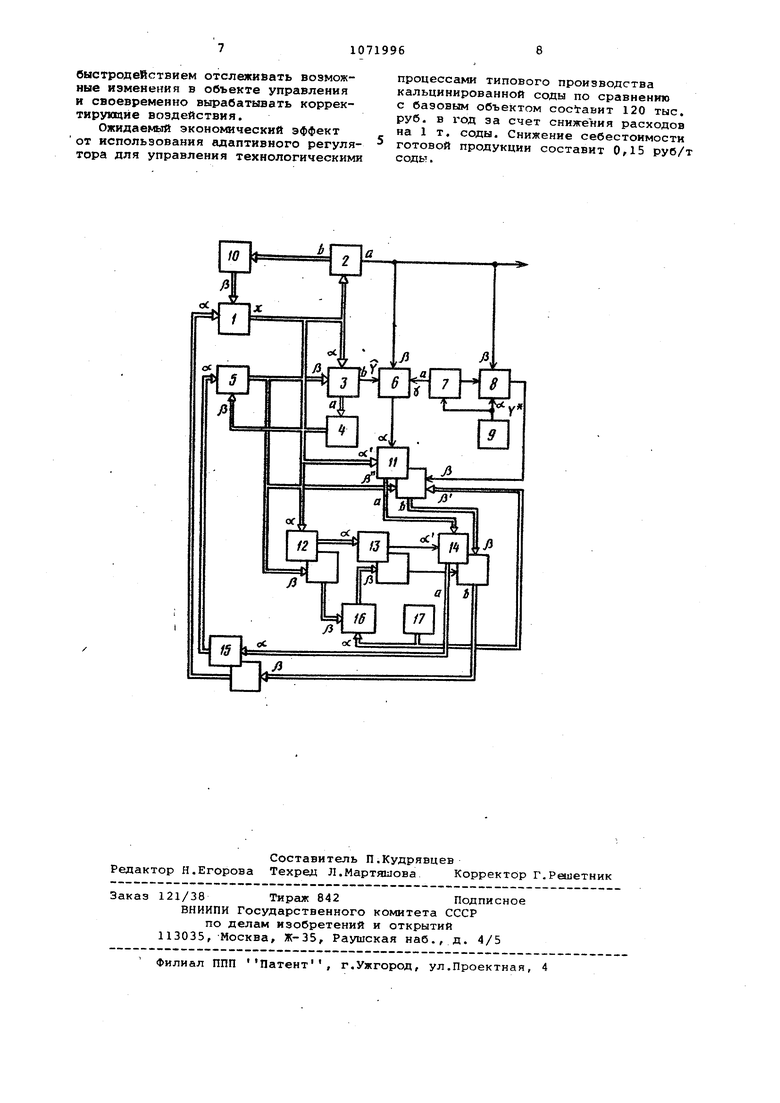
На чертеже изображена блок-схема предлагаемой адаптивной системы управления для варианта нестационарного многомерного объекта управления cm входами и одним выходом.
Адаптивная система управления содержит сумматор 1 объекта, объект 2 управления, модель 3 объекта управления, блок 4 задержки модели, сумматор 5 модели, сумматор б ошибки идентификации, блок 7 управления, сумматор 8 ошибки управления, блок 9 задаюдих воздействий, блок 10 задержки объекта, сдвоенный блок 11 умножения, сдвоенный блок 12- квадратора, сдвоенный блок 13 сумматора, сдвоенный блок 1 деления, сдвоенный блок 15 масштабных коэффициентов, блок 16 умножения, блок 17 задания стоимости управляющих воздействий. Блок 7 управления по сути представляет собой таймер, управлягадий работой блоков 6 и 8.
Адаптивная система управления работает следующим образом.
С выхода сумматора 1 объекта входное управляющее воздействие х подается на вход объекта 2 управления, вход oL модели 3 объекта управления, вход сИ- первой группы сдвоенного блока 12 квадратора и на вход ci первой группы сдвоенного блока 11 умножения. Сдвоенные блоки соответственно квадратора 12, умножения 11, сумматора 13, деления 14 и масштабных коэффициентов 15 состоят из двух параллельно и независимо работающих групп, собранных из аналогичных модулей, например операционных усилителей, причем первая группа модулей работает в контуре, решающем задачу идентификации, а вторая группа - в контуре, решающем собственно задачу управления.
Информация о входном воздействии X с выхода состояния b объекта 2 управления через блок 10 задержки объекта с запаздыванием на один такт работы регулятора подается на вход (3 сумматора 1 объекта. С выхода о объекта 2 управления снимается информация об отклике объекта у на управляющее воздействие х и подается на вторые входы /} сумматора 6 ошибки идентификации и сумматора 8 ошибки управления. По командам, поступающим с выходов а и b блока 7 управления, на вход которого подается сигнал с блока 9 задающих воздействий, сумматор 6 оитбки идентификации вычисляет рассогласование между откликом объекта 2 управления и откликом модели 3 объекта управления, поступающим с ее выхода h на первый вход сумматора 6 ошибки идентификации, а сумматор В ошибки управления, на вход d. которого также подается сигнал у с блока 9 задающих воздействий, вычисляет рассогласование между откликом объекта 2 управления и сигналом у блока 9 5 задающих воздействий.
Информация об ошибках идентификации и управления подается на входы oL и /5 первой и второй групп сдвоенного блока 11 умножения соответO ственно. Информация о последнем значении коэффициентов модели 3 объекта управления через выход коэффициентов о и через блок 4 задержки модели с задержкой на один такт ра5 боты регулятора подается на вход /s сумматора 5 модели, которазй служит для настройки коэффициентов модели 3 объекта управления. Информация с выхода сумматора 5 модели поступает также на вход / второй группы
0 сдвоенного блока 12 квадратора и на третий вход р второй группы сдвоенного блока 11 умножения. Элементы векторов входных воздействий х и коэффициентов модели С в сдвоенном
5 блоке 12 квйДраТора возводятся в квадрат, после чего элементы х (i:: 1 ,m) подаются на вход об первой группы сдвоенного блока 13 с тиматрра, а элементы С; (t l,f) подаются
на вход р блока 16 умножения, где умножаются на величины, обратно пропорциональные стоимости управляющих воздействий с,- , которые поступают на вход d блока 16 умножения от блока 17
5 задания стоимости управляющих воздействий. С выхода блока 16 умножения
d- С
величины
подаются на вход (Ь второй группы сдвоенного блока 13 сумматора.
0
В сдвоенном блоке 13 сумматора
вычисляются значения 2 у и
f
(квадраты евклидовых норм , I. - соответствующих векторов), которые подаются на входы делителя oL и ft сдвоенного блока 14 деления. На входы делимого оС и / сдвоенного блока 14 деления поступает информация с выходов а и Ъ сдвоенного блока 11 умножения, у которого первая группа на основании информации, поступакадей с выхода сумматора ошибки идентификации 6 и выхода сумматора 1 объекта, вычисляет значение { У - 9 ) / э вторая группа на основании информации, поступающей с cyNiMaTopa 8 ошибки управления, блока 17 задания стоимости
управляющих воздействий и выхода сумматора 5 модели, вычисляет значение {:(-у )D--C, Сдвоенный блок 14 деления на основании поступающей в него информации вычисляет управлянхцие воздействия, которые через
сдвоенный блок 15 масштабных коэффициентов подаются .на входной сумматора 1 объекта и с5гмматора 5 модели, а те, в свою очередь, вычисляют оптимальные значения управляющих воздействий X и коэффициентов С модели 3 объекта управления.
Пример. Пусть объект описывается уравнением
где 3 отклик ооъекта на п-м
такте; - мерный вектор входных
воздействий;
- мерный вектор неизвестны коэффициентов объекта управления .
Модель 3 объекта управления задается уравнением
vC ,1 где yfn - отклик-модели; c fn-Tjin - мерный вектор настраиваемых коэффициентов модели Необходимо в процессе управления ми;нимизировать отклонение отклика объекта 2 управления от зещакхцего воздействия У го критерию минимума суммы квадр: тов отклонений на каждом такте работы системы. Пусть объект 2 управления находится в некотором исходном состоянии о) f а в модели 3 объекта управления установлены значения коэффициентов С to. На первом такте работы системы блок 7 управления по своему выходу b Дает команду на вычисление ошибки
У; ij, а по выходу
управления -у
подается команда запрацения вычислений на вход j- сумматора 6 ошибки идентификации. При этом на выходе сумматора б ошибки идентификации появляется нуль. Сдвоенный блок 12 квадратора, блок 16 умножения и сдвоенный блок 13 сумматора вычисtTl , tV.
ляют величины IL xf о и ZZ ,:
Ь-1frf
которые подаются на входы делителя сдвоенного блока 14 деления.Вычислительные ошибки управления jffojc выхода сумматора 8 ошибки управления и нуль с выхода сумматора 6 ошибки идентификации подаются на входы и «t. сдвоенного блока 11 умножения,на входы ot,
и |9 которого подаются значения
. и CfDJ, где
/d О . ..О
D О а
г-m
матрица стоимости управляющих воздействий, после чего на выходе сдвоенного блока И умножения появляется нуль, а на выходе b появляется (V -yfOJ . в результате операции деления на выходе о( сдвоенного блока 14 деления появляется нуль, а на выходе Ь- вектор
Ф «-Vcj,
который, проходя через сдвоенный блок 15 масштабных коэффициентов, преобразуется в вектор вида
„v -vroj jH.j
CdVcfftoj
После операции суммирования в сумматорах 1 и 5 объекта и модели соответственно на их выходах появляются сигналы
.p, ,
Eld-.cCo I-t соответственно. Таким образом, на первом такте раб;угы системы происходит уточнение управляющего воздействия при неизменны. параметрах модели 3 объекта управления. На втором такте работы блок 7 управления дает кс «анду на вычисление ошибки идентификации в блоке 6 и запрет на вычисление в сумматоре 8 ошибки управления, в результате чего на его выходе
появляется нуль. В результате аналогичных операций в сумматоре 5 модели вычисляется новый вектор коэффициентов модели:
vC-fl- vf-il
c№c№P ,
HxfCi
i:-f
a на выходе сумматора 1 объекта со храняется управлякнцее воздействие
.
Таким образом, на h-м и (п+1)-м такте работы система вычисляет управляющие воздействия и скорректированные значения коэффициентов модели 3 объекта управления в виде
Hf
xf.-xfh- p д- cfn-fj ,
m
crn-fJ cW+P l W- fnilrCny xjfnj
соответственно. Можно показать, что указанные алгоритмы являются оптимальными в классе адаптивных рекуррентных процедур, минимизирующих рассогласование V - при ограничениях на энергетическую норму
от
11& 1Г-&тС - Ъ& Использование .адаптивной модели, подстраивакадейся к изменяющимся характеристикам объекта управления,
позволяет с высокой точностью и
быстродействием отслеживать возможные изменения в объекте управления и своевременно вырабатывать корректируюцйе воздействия.
Ожидаемый экономический эффект от использования адаптивного регулятора для управления технологическими
процессами типового производства кальцинированной соды по сравнению с базовым объектом составит 120 тыс. руб. в год за счет снижения расходов на 1 т. соды. Снижение себестоимости готовой продукции составит 0,15 руб/т содьт.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Устройство для индентификации линейного объекта | 1978 |
|
SU744455A1 |
| Адантивное устройство для идентификации объекта управления | 1987 |
|
SU1478190A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| Устройство для определения весовых функций | 1982 |
|
SU1140131A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство для определения экстремальных характеристик | 1981 |
|
SU1035566A1 |
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая сумматор объекта, подключенный выходом к входам объекта управления и модели объекта управления, первый выход которой подключен через блок задержки модели к первому входу сумматора модели, ВЕЛход которого соединен с вторым входом модели объекта управления, соединенной вторым выходом с первым входом суквдатора ошибки идентификации, второй вход которого подключен к выходу объекта управления, а управляющий вход сумматора ошибки идентификации соединен с. первым выходом блока управления, первый вход сумматора ошибки управления соединен с выходом блока яадагацих воздействий и с входом блока управления, второй выход которого подключен к управляющему входу сумматора ошибки управления, соединенного вторым входом с выходом объекта управления, второй вход сумматора объекта подключен через блок задержки объекта к информационному выходу объекта управления, отличающаяся тем, что, с целью повышения точности и быстродействия, в нее введены сдвоенный блок умножения, сдвоенный блок квадратора, сдвоенный блок сумматора, сдвоенный блок деления, сдвоенный блок масштабных коэффициентов, блок умножения и блок задания стоимости управляющих воздействий, причем выход сумматора ошибки идентификации подключен к первому входу сдвоенного блока умножеия, второй вход которого соединен с выходом сумматора объекта и с первым вхо-, дом сдвоенного блока квадратора, подключенного первым выходом к первому входу сдвоенного блока сумматора, первый выход сдвоенного блока умножения подключен к первому входу сдвоенного блока деления, второй вход которого соединен с первым С выходом сдвоенного блока сумматора, а третий и четвертый входы сдвоен(Л ного блока деления подключены соответственно к второму выходу сдвоенного блока сумматора и к второму выходу сдвоенного блока умножения, третий вход которого подключен к выходу сумматора модели и к второму входу сдвоен-ного блока квадратора, четвертый вход сдвоенного блока Змножения подключен к первому входу блока умножения и к выходу блока задания стоимости управляющих воздействий, выход сумматора ошибки со со управления соединен с пятым входом сдвоенного блока умножения, второй Oi выход сдвоенного блока квадратора соединен с вторым входом блока умножения, подключенного выходом к второму входу сдвоенного блока сумматора, первый и второй выходы сдвоенного блока деления соединены соответственно с первым и вторым входами сдвоенного блока масштабных коэффициентов, первый выход которого подключен к второму входу сумматора модели, а второй выход сдвоенного блока масьчтабных коэффициентов подключен к первому входу сумматора объекта.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самонастраивающаяся система для регулирования объектов с запаздыванием | 1977 |
|
SU634235A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
