Фиг.1
сдвига, равной периоду дискретизации Т, ;, передаточная функция H,(Z) цифрового фильтра равна
. Z4№
где z ejli Л
Передаточную функцию цифрового фильтра в частотной области можно получить подставляя
Jl Jj-L-в (1): (2)
Изобретение относится к вычислительной технике и может быть использовано в составе систем передачи и обработки дискретной информации, в . электросвязи, гидро- и радиолокации 5 и т.п. для цифровой фильтрации электрических сигналов.
Целью изобретения является уменьшение искажений, связанных с наложением спектров дискретизированных сигналов. JO
На фиг. 1 приведена структурная электрическая схе ма цифрового фильтра; на фиг. 2 - пример выполнения блока оценки скорости сигнала; на фиг.З временная диаграмма, поясняющая рабо- 15 гистров 5.1-5.К сдвига равна КТД ту цифрового фильтра; на фиг. 4 и 5 - (К - целое число), то оператор г примеры выполнения тактового генератора и блока задержки соответственно.
Цифровой фильтр содержит аналого- цифровой преобразователь (АЦП) 1, так-20 товый генератор 2, первый сумматор 3, первый коммутатор 4, регистр сдвига и дополнительные регистры 5.1-5.К
сдвига, блок 6 задержки, первый умно- -, п п повысив тактовую частоту работы циф- житель 7, второй коммутатор 8, блок 9 „„„„„„ „ т„„ „„„„
памяти коэффициентов, блок 10 оценки скорости изменения сигнала, второй умножитель 11 и второй сумматор 12.
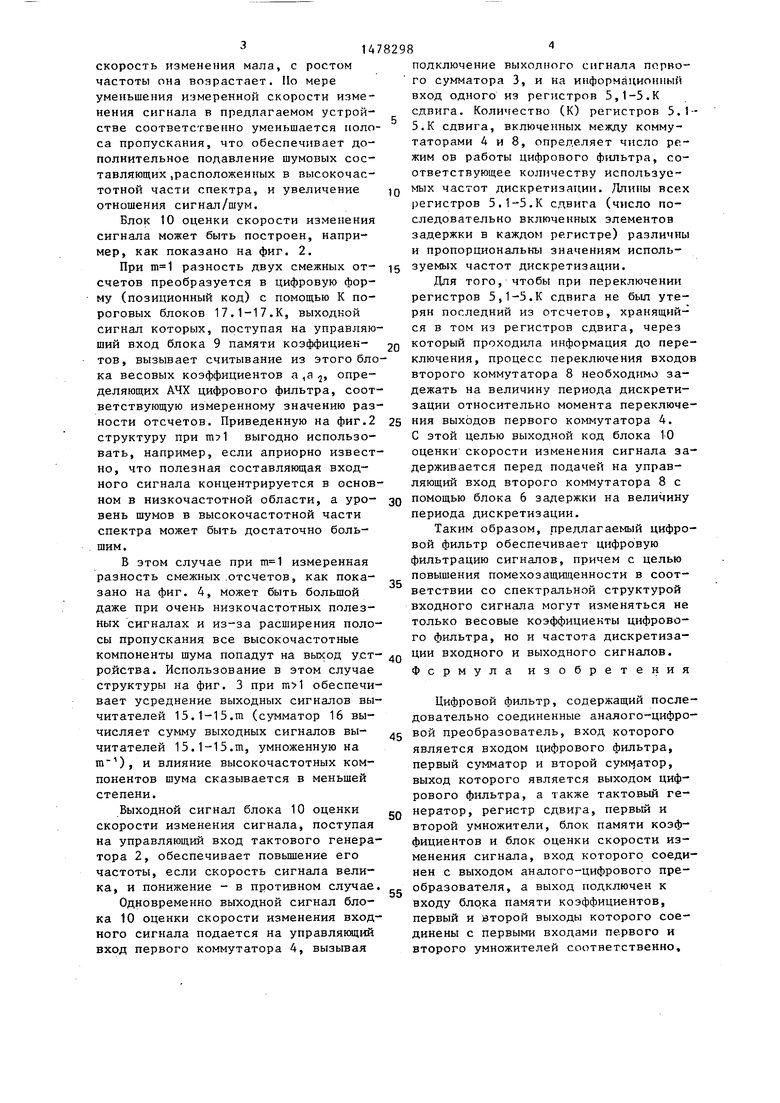
Блок 10 содержит регистр 13 сдвил . . ., эл цию одного и того же вида с той раз- га, элементы 14.1-14т задержки, вычи- JU „тгтт„„, ,„ „„„„„„„ „„ „„„
татели 15.1-15п, сумматор 16, пороговые блоки 17.1-17К.
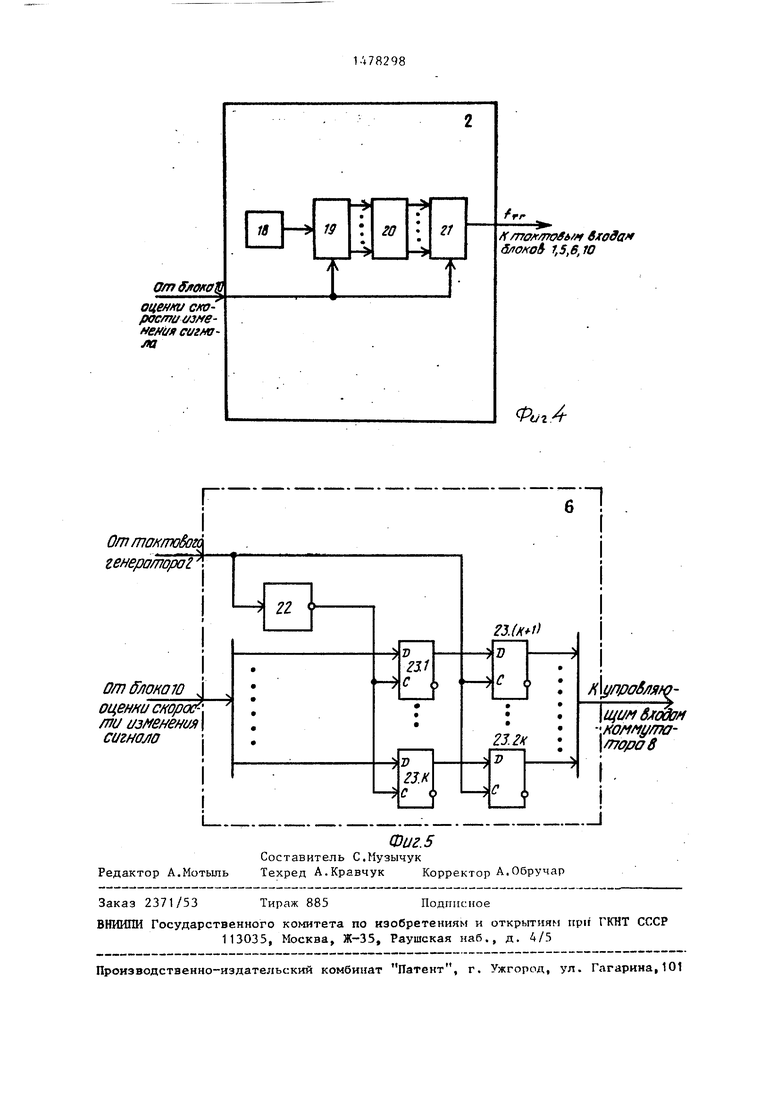
Тактовый генератор 2 содержит генератор 18, первый коммутатор 19, блок 20 делителей частоты и второй 35 коммутатор 21. Блок 6 содержит инвертор 22 и D-триггеры 23.1-23.2К.
Цифровой фильтр работает .следующим образом.
Предварительно ограниченный по 40 спектру входной сигнал преобразуется в АЦП 1 в цифровую форму, причем частота дискретизации сигнала в АЦП 1
н /иТд.
1-aie Если задержка, вносимая цепью
сдвига, состоящей из первого коммутатора 4, второго коммутатора 8 и рев (1) должен быть заменен на z-, в связи с чем новая передаточная функция Нк() равна
, . . ft «г
„) . о)
1-aie
Если в этом случае уменьшить период дискретизации (соответственно
рового фильтра и частоту тактового генератора 2) также в К раз ( хКм), то очевидно, что равенства (2) и (3) определяют передаточную функницей, что в последнем случае расстояние вдоль оси их частот между низкочастотной областью и левой боковой полосой при первой гармонике частоты дискретизации увеличивается в К раз для спектров входного и выходного сигналов за счет увеличения частоты дискретизации и тактовой частоты работы фильтра.
Описанное раздвижение вдоль частотной оси периодических составляющих спектров входного и выходного сигналов используется в предлагаемом цифровом фильтре для уменьшения искажеопределяется частотой тактового генесдвига, равной периоду дискретизаци Т, ;, передаточная функция H,(Z) цифрового фильтра равна
. Z4№
где z ejli Л
Передаточную функцию цифрового фильтра в частотной области можно получить подставляя
Jl Jj-L-в (1): (2)
н /иТд.
1-aie Если задержка, вносимая цепью
сдвига, состоящей из первого коммуттора 4, второго коммутатора 8 и регистров 5.1-5.К сдвига равна КТД (К - целое число), то оператор г
в (1) должен быть заменен на z-, в связи с чем новая передаточная функция Нк() равна
, . . ft «г
„) . о)
1-aie
Если в этом случае уменьшить период дискретизации (соответственно
повысив тактовую частоту работы циф- „„„„„„ „ т„„ „„„„
рового фильтра и частоту тактового генератора 2) также в К раз ( хКм), то очевидно, что равенства (2) и (3) определяют передаточную функцию одного и того же вида с той раз- „тгтт„„, ,„ „„„„„„„ „„ „„„
ницей, что в последнем случае расстояние вдоль оси их частот между низкочастотной областью и левой боковой полосой при первой гармонике частоты дискретизации увеличивается в К раз для спектров входного и выходного сигналов за счет увеличения частоты дискретизации и тактовой частоты работы фильтра.
Описанное раздвижение вдоль частотной оси периодических составляющих спектров входного и выходного сигналов используется в предлагаемом цифровом фильтре для уменьшения искаже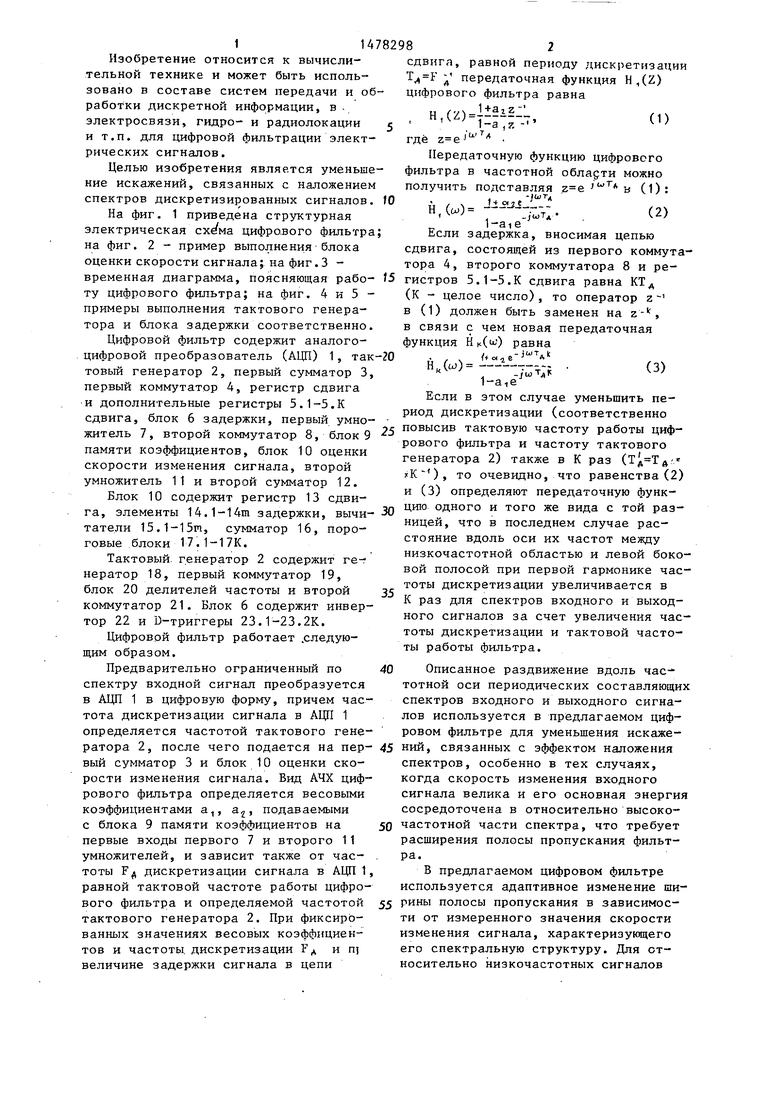
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный дискретно-аналоговый фильтр | 1988 |
|
SU1578805A1 |
| Многочастотный цифровой фильтр | 1987 |
|
SU1474827A1 |
| Адаптивный цифровой фильтр | 1988 |
|
SU1566470A1 |
| Цифровой фильтр | 1984 |
|
SU1262690A1 |
| Цифровой фильтр | 1988 |
|
SU1566471A1 |
| Цифровой фильтр | 1988 |
|
SU1569957A1 |
| Нерекурсивный цифровой фильтр-дециматор | 1989 |
|
SU1698953A2 |
| Устройство синхронизации с фазовой автоподстройкой частоты | 1988 |
|
SU1700751A1 |
| Устройство для цифровой фильтрации на основе дискретного преобразования Фурье | 1990 |
|
SU1795475A1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
Изобретение относится к вычислительной технике. Цель изобретения - уменьшение искажений, связанных с наложением спектров дискретизированных сигналов. Цифровой фильтр содержит АЦП 1, тактовый г-р 2, сумматоры 3 и 12, коммутаторы 4 и 8, регистры 5 сдвига, блок 6 задержки, умножители 7 и 11, блок 9 памяти коэффициентов и блок 10 оценки скорости изменения сигнала. Цель достигается путем раздвижения вдоль частотной оси периодических составляющих спектров входного и выходного сигналов, особенно в тех случаях, когда скорость изменения входного сигнала велика и его основная энергия сосредоточена в относительно высокочастотной части спектра, что требует расширения полосы пропускания фильтра. В данном фильтре используется адаптивное изменение ширины полосы пропускания в зависимости от измеренного значения скорости изменения сигнала, характеризующего его спектральную структуру. 5 ил.
ратора 2, после чего подается на пер- 45 ний, связанных с эффектом наложения вый сумматор 3 и блок 10 оценки ско- спектров, особенно в тех случаях, рости изменения сигнала. Вид АЧХ цифрового фильтра определяется весовыми коэффициентами а,, аг, подаваемыми
с блока 9 памяти коэффициентов на первые входы первого 7 и второго 11 умножителей, и зависит также от часкогда скорость изменения входного сигнала велика и его основная энергия сосредоточена в относительно высоко- 50 частотной части спектра, что требует расширения полосы пропускания фильтра.
тоты FA дискретизации сигнала в АЦП 1, В предлагаемом цифровом фильтре равной тактовой частоте работы цифро- используется адаптивное изменение ши- вого фильтра и определяемой частотой 55 Рины полосы пропускания в зависимос- тактового генератора 2. При фиксиро- ти от измеренного значения скорости ванных значениях весовых коэффнциен- изменения сигнала, характеризующего тов и частоты дискретизации FA и щ его спектральную структуру. Для от- величине задержки сигнала в цепи носительно низкочастотных сигналов
скорость изменения мала, с ростом частоты она возрастает. Но мере уменьшения измеренной скорости изменения сигнала в предлагаемом устройстве соответственно уменьшается полоса пропускания, что обеспечивает дополнительное подавление шумовых составляющих расположенных в высокочастотной части спектра, и увеличение отношения сигнал/шум.
Блок 10 оценки скорости изменения сигнала может быть построен, например, как показано на фиг. 2.
При разность двух смежных отсчетов преобразуется в цифровую форму (позиционный код) с помощью К пороговых блоков 17.1-17.К, выходкой сигнал которых, поступая на управляющий вход блока 9 памяти коэффициен- тов, вызывает считывание из этого блока весовых коэффициентов а,а, определяющих АЧХ цифрового фильтра, соответствующую измеренному значению разности отсчетов. Приведенную на фиг.2 структуру при m7l выгодно использовать, например, если априорно известно, что полезная составляющая входного сигнала концентрируется в основном в низкочастотной области, а уро- вень шумов в высокочастотной части спектра может быть достаточно большим.
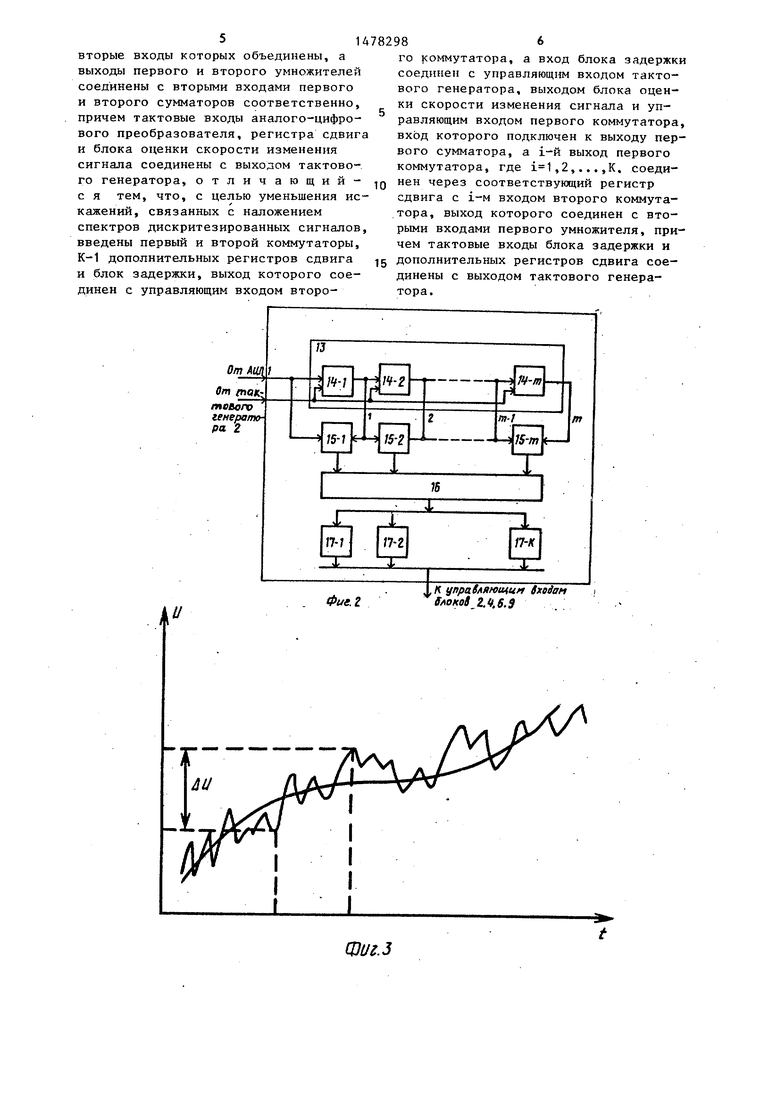
В этом случае при измеренная разность смежных отсчетов, как показано на фиг. 4, может быть большой даже при очень низкочастотных полезных сигналах и из-за расширения полосы пропускания все высокочастотные компоненты шума попадут на выход уст-
ройства. Использование в этом случае структуры на фиг. 3 при обеспечивает усреднение выходных сигналов вы- читателей 15.1-15.rn (сумматор 16 вычисляет сумму выходных сигналов вы- читателей 15.1-15.т, умноженную на га 1), и влияние высокочастотных компонентов шума сказывается в меньшей степени.
Выходной сигнал блока 10 оценки скорости изменения сигнала, поступая на управляющий вход тактового генератора 2, обеспечивает повышение его частоты, если скорость сигнала велика, и понижение - в противном случае
Одновременно выходной сигнал блока 10 оценки скорости изменения входного сигнала подается на управляющий вход первого коммутатора 4, вызывая
0
5
0
0 дни входного и
подключение выходного сигнала первого сумматора 3, и на информационный вход одного из регистров 5,1-5.К сдвига. Количество (К) регистров 5.1- 5.К сдвига, включенных между коммутаторами 4 и 8, определяет число режим ов работы цифрового фильтра, соответствующее количеству используемых частот дискретизации. Длины всех регистров 5.15.К сдвига (число последовательно включенных элементов задержки в каждом регистре) различны и пропорциональны значениям используемых частот дискретизации.
Для того, чтобы при переключении регистров 5,15.К сдвига не был утерян последний из отсчетов, хранящийся в том из регистров сдвига, через который проходила информация до переключения, процесс переключения входов второго коммутатора 8 необходимо за- дежать на величину периода дискретизации относительно момента переключе- 5 ния выходов первого коммутатора 4. С этой целью выходной код блока 10 оценки скорости изменения сигнала задерживается перед подачей на управляющий вход второго коммутатора 8 с помощью блока 6 задержки на величину периода дискретизации.
Таким образом, предлагаемый цифровой фильтр обеспечивает цифровую фильтрацию сигналов, причем с целью повышения помехозащищенности в соответствии со спектральной структурой входного сигнала могут изменяться не только весовые коэффициенты цифрового фильтра, но и частота дискретиза- выходно го с иг н алов. изобретения
5
Формула
Цифровой фильтр, содержащий последовательно соединенные аналого-цифро- вой преобразователь, вход которого является входом цифрового фильтра, первый сумматор и второй сумматор, выход которого является выходом цифрового фильтра, а также тактовый генератор, регистр сдвига, первый и второй умножители, блок памяти коэффициентов и блок оценки скорости изменения сигнала, вход которого соединен с выходом аналого-цифрового преобразователя, а выход подключен к входу блока памяти коэффициентов, первый и второй выходы которого соединены с первыми входами первого и второго умножителей соответственно.
вторые входы которых объединены, а выходы первого и второго умножителей соединены с вторыми входами первого и второго сумматоров соответственно, причем тактовые входы аналого-цифрового преобразователя, регистра сдвига и блока оценки скорости изменения сигнала соединены с выходом тактового генератора, отличающий- с я тем, что, с целью уменьшения искажений, связанных с наложением спектров дискритезированных сигналов, введены первый и второй коммутаторы, К-1 дополнительных регистров сдвига и блок задержки, выход которого соединен с управляющим входом второи
Фие.2
го коммутатора, а вход блока задержки соединен с управляющим входом тактового генератора, выходом блока оценки скорости изменения сигнала и управляющим входом первого коммутатора, вход которого подключен к выходу первого сумматора, а i-й выход первого коммутатора, где ,2,...,К, соединен через соответствующий регистр сдвига с i-м входом второго коммутатора, выход которого соединен с вторыми входами первого умножителя, причем тактовые входы блока задержки и дополнительных регистров сдвига соединены с выходом тактового генератора.
К дпрабляннцци 8xotan SAOKO 2.Ц.6.9
Фиг.З
I
Г
го
zr
Л то#/гг0Јьм входам бяокоЬ 1,5,6,10
Фиг4
П
| Цифровой фильтр | 1981 |
|
SU1053274A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
