фиг1
Изобретение относится к подъемно- транспортному оборудованию, а именно к манипуляторам, применяемым дл перемещения крупногабаритных изделий при обслуживании прессов, конвейеров
Целью изобретения является расширение технологических возможностей и повышение безопасности при увеличении угла поворота грузового блока.
На фиг.1 изображен погрузочный манипулятор; на фиг.2 - узел I на фиг.1 (фиксирующее устройство грузового блока).
Погрузочный манипулятор содержит смонтированный с возможностью поворота на основании 1 корпус 2, несущий выполненную в виде пантографа стрелку 3, уравновешенную пружинами
4,и привод 5 вертикального перемещения. Момент, создаваемый приводом
5,зависит от положения рукоятки 6 управления, связанной, например, с потенциометром, размещенным в грузовом блоке 7. Грузовой блок 7 укреплен на конце стрелы 3 с возможностью вращения вокруг вертикальной оси и несет схват 8 и штангу 9 с ограничителем 10 хода последней, при этом один конец штанги 9 с помощью шарниров 11, 12 обеспечивает поворот штанги относительно горизонтальной
и вертикальной осей соответственно. Другой конец штанги 9 жестко соедине с рукоятками 13 - 15. Рукоятка 13 связана посредством гибкого вала 16 и скобы с рукояткой 6 управления приводом. Шарнир 11 снабжен фиксирующим устройством 17, выполненным в виде закрепленного на неподвижной части шарнира 11 зубчатого элемента и смонтированного на штанге 9 фиксатора, связанного посредством гибкого вала 18 с рукояткой 14.
На втулке шарнира 12 смонтирован фиксатор 19 фиксирующего устройства 20. Зубчатый элемент 21 этого устройства закреплен на вертикальной оси грузового блока 7. Шарнир 12 снабжен винтовым стопором 22, который связан посредством гибкого вала 23 с рукояткой 15.
Манипулятор работает следующим образом.
До начала перемещения грузового блока 7 вращением рукояток 14, 15
0
Фиксаторы выводят из взаимодействия с зубчатыми элементами фиксирующих устройств, обеспечивая подвижность шарниров 11, 12. Оператор разворачивает штангу 9 в удобное для работы положение, после чего с помощью рукояток 14, 15 обеспечивается фиксация шарниров 11, 12.
В случае радиального перемещения грузового блока 7 вращением рукоятки 15 обеспечивается стопорение механизма 20, а вращением рукоятки 14 - жесткая фиксация штанги 9 относительно грузового блока 7.
При необходимости поворота грузового блока 7 вокруг его вертикальной оси вращением рукоятки 15 стопор 22 выводится из взаимодействия с фиксатором 19, после чего поворот грузового блока 7 осуществляется качатель- °ным движением штанги 9. При этом в направлении вращения грузового блока 7 фиксатор 19 постоянно прижат под 5 действием пружины к зубьям элемента 21, обеспечивая жесткое сцепление штанги 9 с грузовым блоком 7. При обратном перемещении штанги 9 фиксатор 19 проскальзывает по зубцам элемента 21.
0
0
5
0
5
0
5
Формула изобретения
Погрузочный манипулятор по авт. св. № 1073087, отличающий- с я тем, что, с целью расширения
технологических возможностей и повыI
шения безопасности при увеличении угла поворота грузового блока, он снабжен двумя дополнительными рукоятками с гибкими валами и фиксирующими устройствами, размещенными соответственно в шарнирах, соединяющих штангу с грузовым блоком и грузовой блок со стрелой, при этом каждое фиксирующее устройство выполнено в виде зубчатого элемента и фиксатора, подпружиненного относительно него, при этом зубчатые элементы фиксирующих устройств закреплены соответственно на грузовом блоке и вертикальной оси стрелы, а фиксаторы размещены с возможностью относительного перемещения соответственно на штанге и грузовом блоке и связаны с соответствующими указанными гибкими валами.
Г9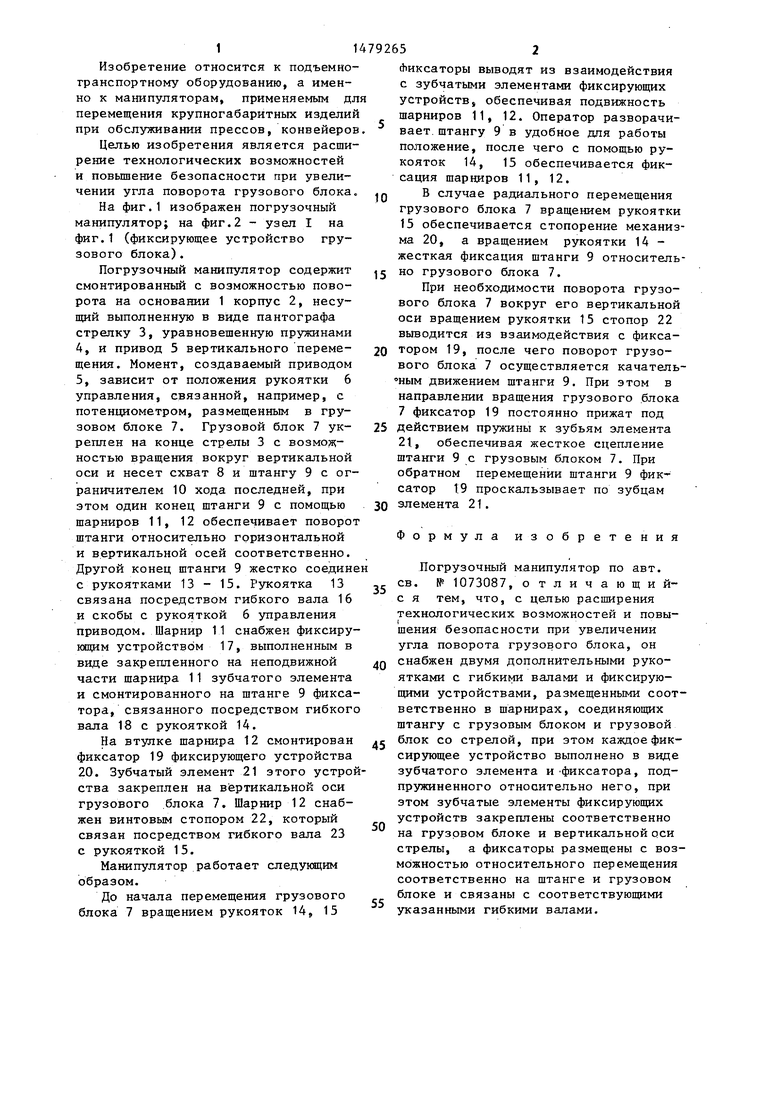
| название | год | авторы | номер документа |
|---|---|---|---|
| Подгрузочный манипулятор | 1979 |
|
SU823113A1 |
| Способ монтажа крано-манипуляторной установки на шасси грузового автомобиля | 2021 |
|
RU2754370C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
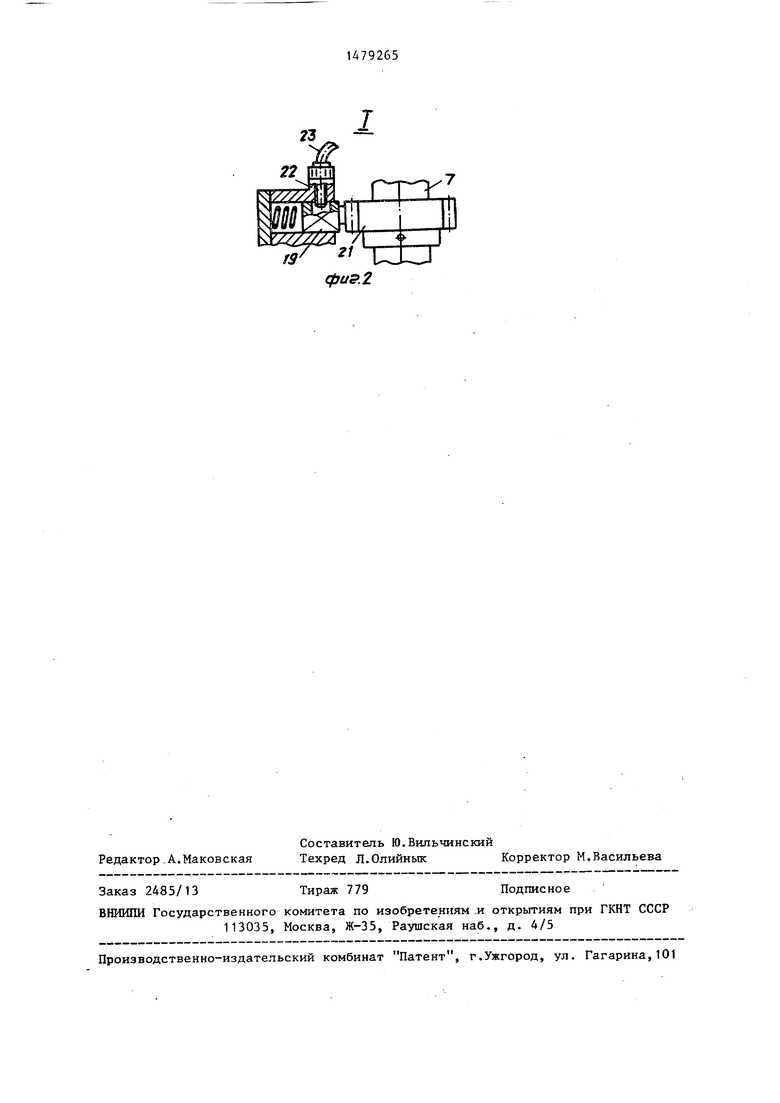
Изобретение относится к подъемно-транспортному оборудованию, а именно к манипуляторам, применяемым для перемещения крупногабаритных изделий при обслуживании прессов, конвейров. Целью изобретения является расширение технологических возможностей и повышение безопасности при увелечении угла поворота грузового блока. При вращении рукояток 14 и 15 через гибкие валы 18 и 23 осуществляется управление фиксирующими устройствами 17 и 20, первое из которых фиксирует штангу 9 относительно грузового блока 7 со схватом 8,а второе фиксирует грузовой блок 7 относительно вертикальной оси стрелы 3,размещенной с возможностью поворота на основании 1. 2 ил.
фиэ.2
Редактор.А.Маковская
Составитель Ю.Вильчинский
Техред Л.Олийнык Корректор М.Васильева
Заказ 2485/13
Тираж 779
ВНИИПИ Государственного комитета по изобретениям .и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Подписное
| Погрузочный манипулятор | 1982 |
|
SU1073087A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
