Фиг.1
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
Целью изобретения является расширение технологических возможностей за счет уве- личения зоны перемещений рабочих органов относительно обрабатываемой детали.
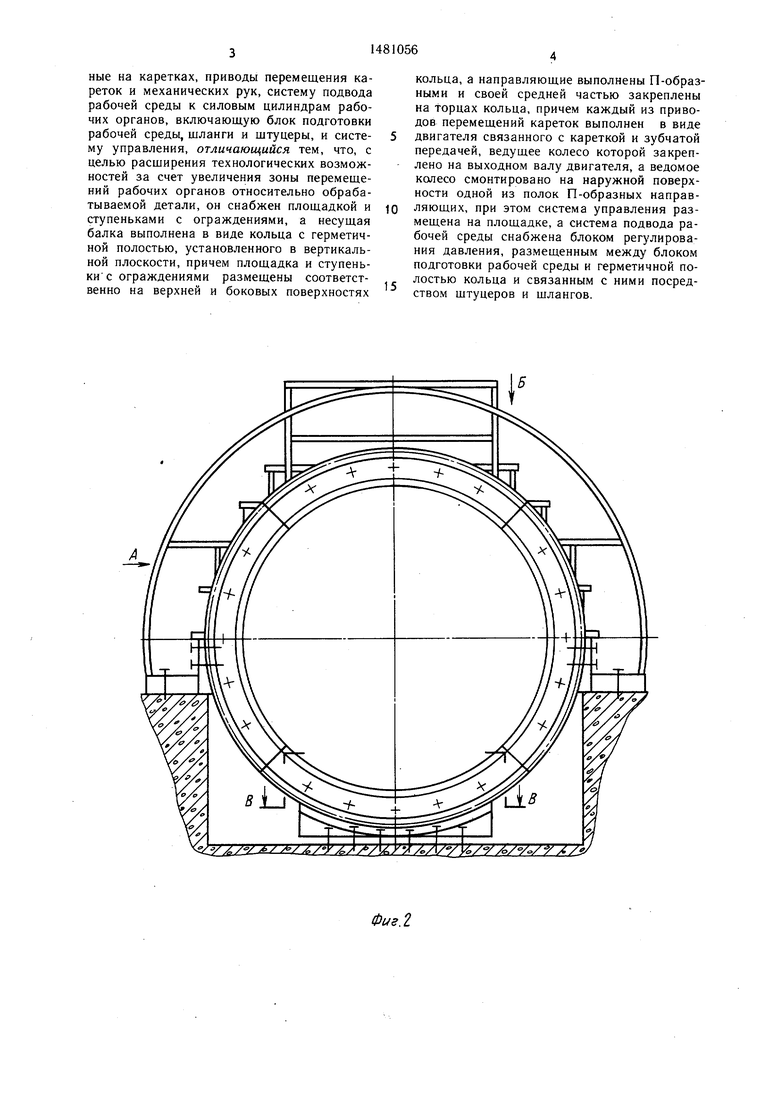
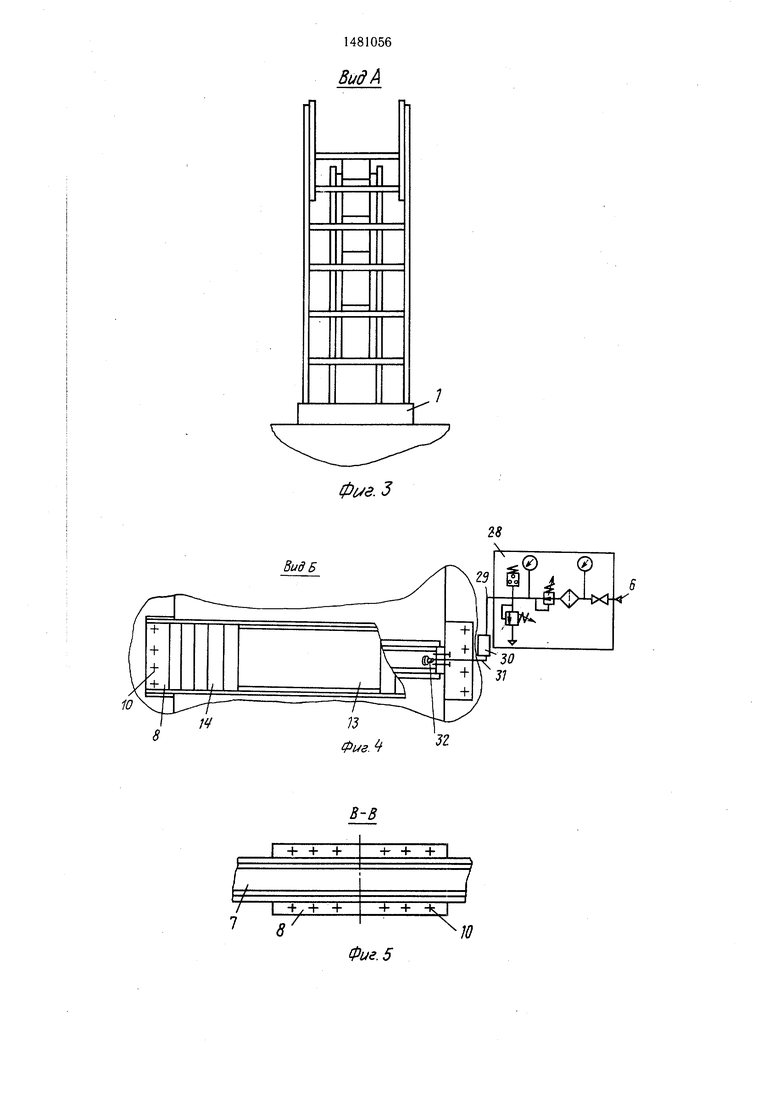
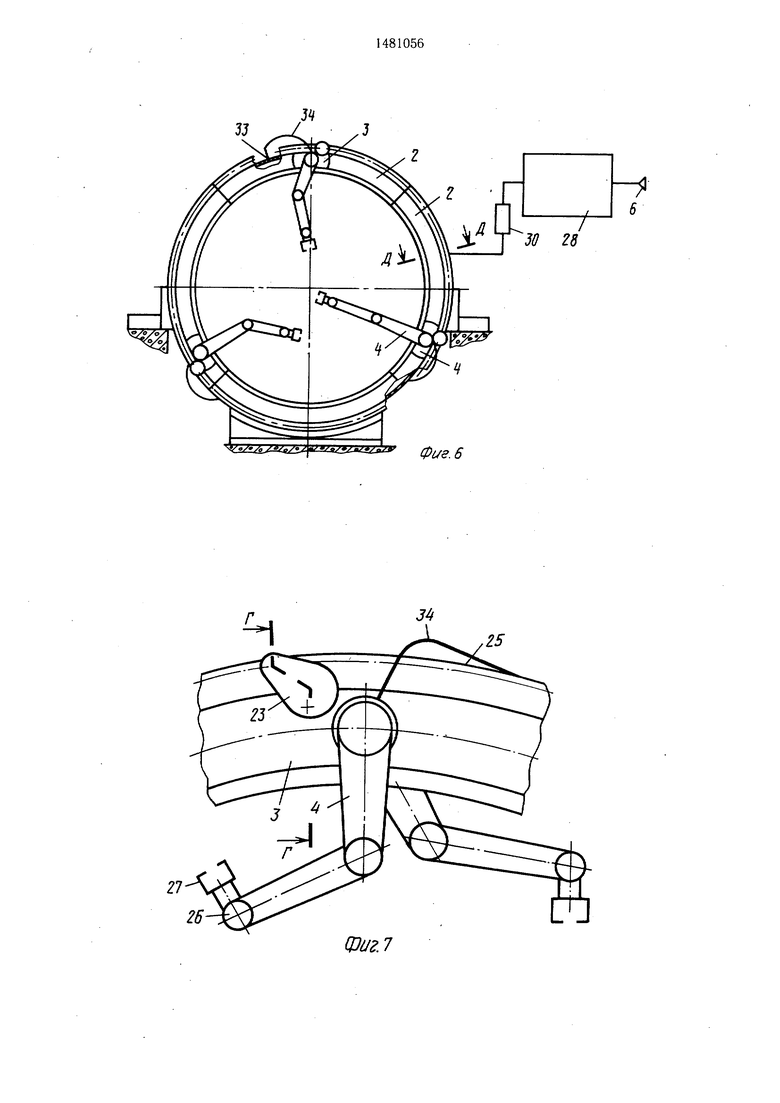
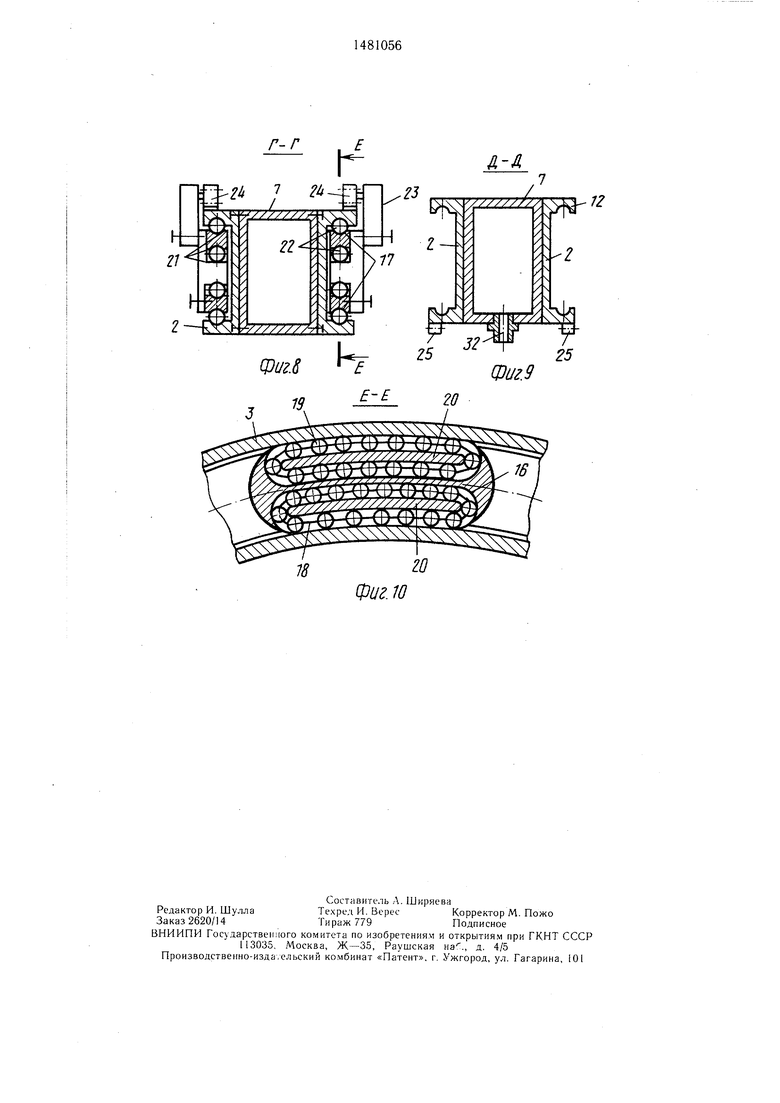
На фиг. 1 представлен промышленный робот, внутри которого на позиционере установлен кузов, общий вид; на фиг. 2 - промышленный робот без кареток, механических рук и системы подвода рабочей среды, общий вид; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2 (с системой подвода рабочей среды); на фиг. 5 - разрез В--В на фиг. 2; на фиг. 6 - промышленный робот без ограждений, ступенек, площадки, общий вид; на фиг. 7 - промышленный робот, фрагмент; на фш 8 ра фез Г-Г на фиг. 7; на фиг. 9 - разрез Д- Д на фиг. 6; на фиг. 10 - разрез Е II на фиг. 8.
Промышленный робот содержит несущую балку 1 с направляющими 2, в которых установлены каретки 3, несущие механические руки 4, приводы перемещения кареток и механических рук, системы управления 5 и подвода рабочей среды 6.
Несущая балка 1 выполнена в виде кольца 7 с герметичной полостью, установленного в вертикальной плоскости на опорах 8, которые крепятся к фундаменту 9 посредством болтов 10. В фундаменте 9 выполнена траншея 11. Направляющие 2 выполнены П- образными и своей средней частью закреплены на обоих торцах кольца 7, а на внутренних поверхностях рамок П-образных направляющих выполнены радиусные канавки 12. На верхней и боковых поверхностях коль ца 7 установлены соответственно площадка 13 и ступеньки 14 с ограждением 15, например, арочным. На площадке 13 расположена система 5 управления.
Каждая из кареток 3 состоит из корпуса 16 с двумя пазами 17, в которых размещены сепараторы 18 с шариками 19 и вкладыши 20, установленные внутри сепараторов 18 и жестко связанные с корпусами 16 кареток 3. При этом по периметру вкладышей 20 и на боковых поверхностях пазов 17 выполнены радиусные канавки 21 и 22 под шарики 19.
Каждый из приводов перемещения каре- гок включает двшатсль 23, установленный на корпусе 16 кареток 3. и зубчатую передачу, ведущее колесо 24 которой жестко связано с выходным валом двигателя 23, а ведомое колесо 25 установлено на наружной поверхности одной из полок П-образной направляющей 2. Каждая из механических рук 4 имеет кисть 26 с рабочим органом 27, например сварочными клещами, и как минимум две степени подвижности.
Система 6 подвода рабочей среды включает блок 28 подготовки рабочей среды,
шланг 29, блок 30 регулирования давления, который посредством шланга 29 соединен с блоком 28 подготовки рабочей среды и посредством шланга 31 и штуцера 32 с герметичной полостью кольца 7. Далее рабочая среда поступает через штуцеры 33, шланги 34 и каналы, выполненные в корпусах механических рук 4, к силовым цилиндрам рабочих органов 27. Внутри несущей балки 1 размещена свариваемая деталь, например кузов 35, установленный на позиционере 36, который размещен в траншее 11.
Промышленный робот работает следующим образом.
На позиционере 36 установлен кузов 35, элементы которого подлежат сварке. Система 5 управления приводит в движение приводы перемещения кареток 3 и механических рук 4. У приводов перемещения кареток 3 начинает вращаться ведущее зубчатое колесо 24, которое обкатывается по зубьям ведомого зубчатого колеса 25 и перемешает каретки 3 вместе с механическими руками 4 относительно направляющих 2 через шарики 19. Шарики 19 вместе с сепаратором 18 перемещаются в радиусных канавках 12, 21 и 22. После прихода кареток 3 в трипемое положение привода перемещения механических рук 4 перемещают кисть 26 со сварочными клещами 27 в положение, при котором сварочные клещи 27 сваривают элементы кузова 35. Подвод рабочей среды к сварочным клещам 27 кисти 26 для работы силовых цилиндров сварочных клещей 27 осуществляется от источника рабочей среды через блок 28 подготовки рабочей среды, шланг 29, блок 30 регулирования давления, шланг 31, герметичную полость кольца 7, штуцер 33, шланги 34 и каналы, выполненные в механических руках 4.
В зависимости от массы объектов, которыми приходится манипулировать, изменяются характеристики промышленного робота, в частности прогиб несущей балки 1 с направляющими 2. Для получения стабильных характеристик промышленного робота вне зависимости от массы объекта манипулирования служит блок 30 регулирования давления, который автоматически по командам от системы управления регулирует давление рабочей среды (газа) в герметичной полости кольца 7. С изменением жесткости кольца 7 изменяются характеристики промышленного робота.
Формула изобретения
Промышленный робот, содержащий несущую балку с направляющими, установленную на опорах, каретки, размещенные на направляющих несущей балки, механические руки с рабочими органами, установленные на каретках, приводы перемещения кареток и механических рук, систему подвода рабочей среды к силовым цилиндрам рабочих органов, включающую блок подготовки рабочей среды, шланги и штуцеры, и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения зоны перемещений рабочих органов относительно обрабатываемой детали, он снабжен площадкой и ступеньками с ограждениями, а несущая балка выполнена в виде кольца с герметичной полостью, установленного в вертикальной плоскости, причем площадка и ступеньки с ограждениями размещены соответственно на верхней и боковых поверхностях
0
кольца, а направляющие выполнены П-образ- ными и своей средней частью закреплены на торцах кольца, причем каждый из приводов перемещений кареток выполнен в виде двигателя связанного с кареткой и зубчатой передачей, ведущее колесо которой закреплено на выходном валу двигателя, а ведомое колесо смонтировано на наружной поверхности одной из полок П-образных направляющих, при этом система управления размещена на площадке, а система подвода рабочей среды снабжена блоком регулирования давления, размещенным между блоком подготовки рабочей среды и герметичной полостью кольца и связанным с ними посредством штуцеров и шлангов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| Портал промышленного робота | 1983 |
|
SU1135637A1 |
| Манипулятор | 1977 |
|
SU738866A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Механизм перемещения рабочих органов к устройству для переноса заготовок | 1982 |
|
SU1060284A1 |
| Автоматизированный комплекс для штамповки | 1981 |
|
SU997924A1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| УСТАНОВКА ДЛЯ СВАРКИ СЕКТОРОВ ОТВОДОВ ТРУБ | 2021 |
|
RU2780860C1 |
Изобретение относится к области машиностроения и может быть использовано при создании промышленных роботов. Целью изобретения является расширение технологических возможностей робота за счет увеличения зоны перемещений рабочих органов относительно обрабатываемой детали. Механические руки 4 с рабочими органами, установленные в П-образных направляющих 2 несущей балки 1, выполненной в виде кольца 7 с герметичной полостью, установленного в вертикальной плоскости, могут перемещаться по кругу, обеспечивая подвод рабочего органа с различных сторон обрабатываемой детали 35. Размещение площадки 13 с системой управления 5 на верхней поверхности кольца 7 позволяет освободить рабочую зону промышленного робота, так же как и использование герметичной полости кольца 7 для подвода рабочей среды к силовым цилиндрам рабочих органов механических рук 4. 10 ил.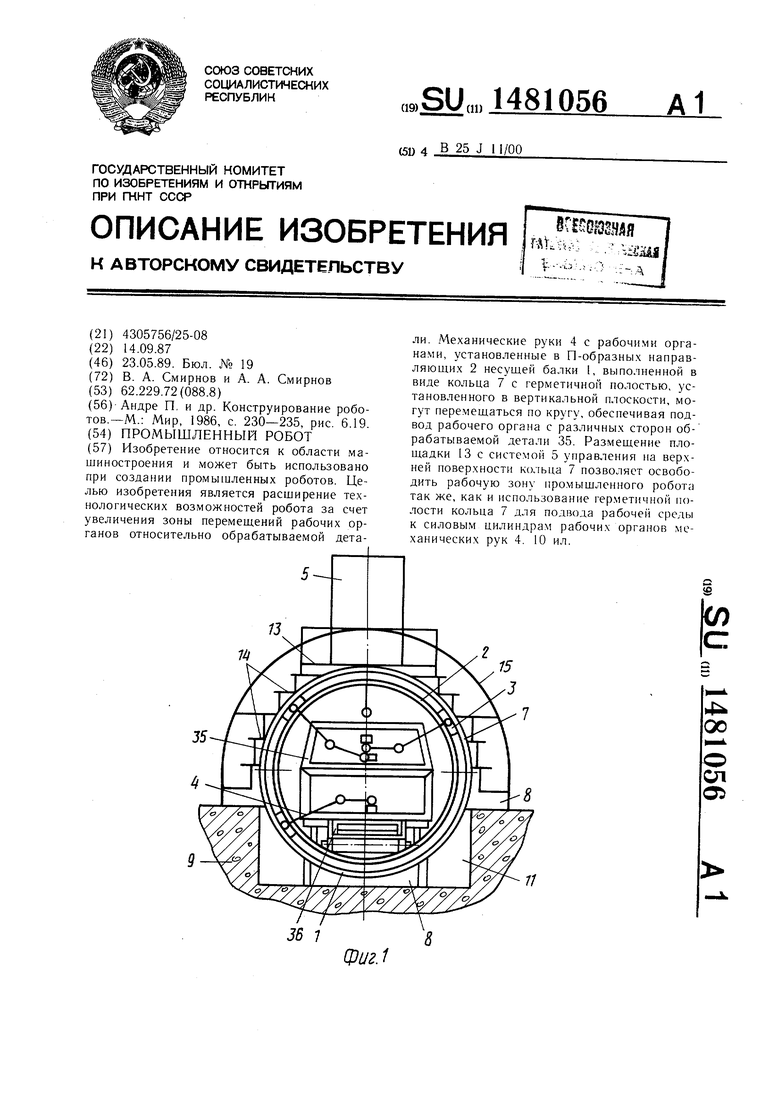
MA
фиг.З
8
Фиг. 4
Фиг. 5
3J
ztatzsvtefv 01/в 6
26
25
Фиг.7
Г-Г
Фиг.8
Д-Л
/
12
25
32Фиг.9
25
Е-Е
Фиг. w
| Андре П и др | |||
| Конструирование роботов -М.: Мир, 1986, с 230-235, рис 6.19. |
