4
ЭО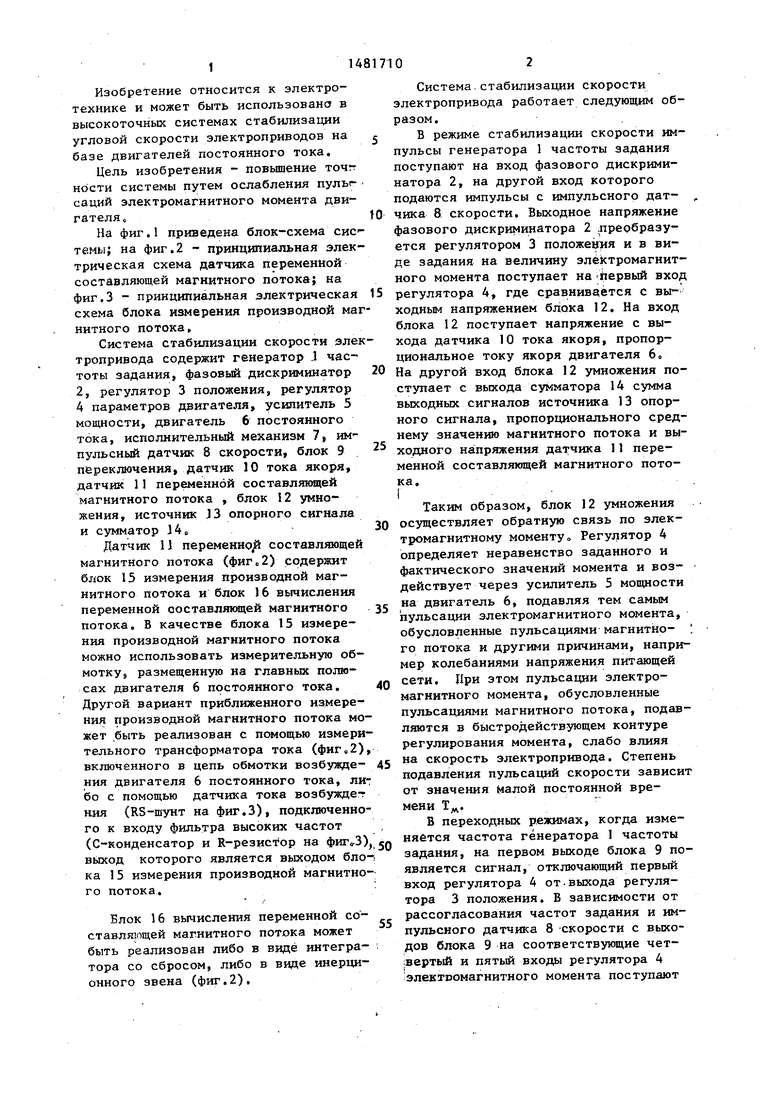
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока и его варианты | 1981 |
|
SU991570A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство регулирования частоты вращения магнитных дисков | 1980 |
|
SU930372A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
Изобретение относится к электротехнике и может быть использовано в высокоточных системах стабилизации угловой скорости электроприводов на базе двигателей постоянного тока. Целью изобретения является повышение точности системы. Система содержит блок 9 переключения, генератор 1 частоты задания, фазовый дискриминатор 2, регулятор 3 положения, регулятор 4 параметров двигателя, усилитель 5 мощности, двигатель 6 с датчиком 10 тока якоря, исполнительный механизм 7, импульсный датчик 8 скорости, датчик 11 переменной составляющей магнитного потока, источник 13 опорного сигнала, сумматор 14, блок 12 умножения. В системе снижаются пульсации электромагнитного момента двигателя, обусловленные якорными и зубцовыми пульсациями магнитного потока. 3 ил.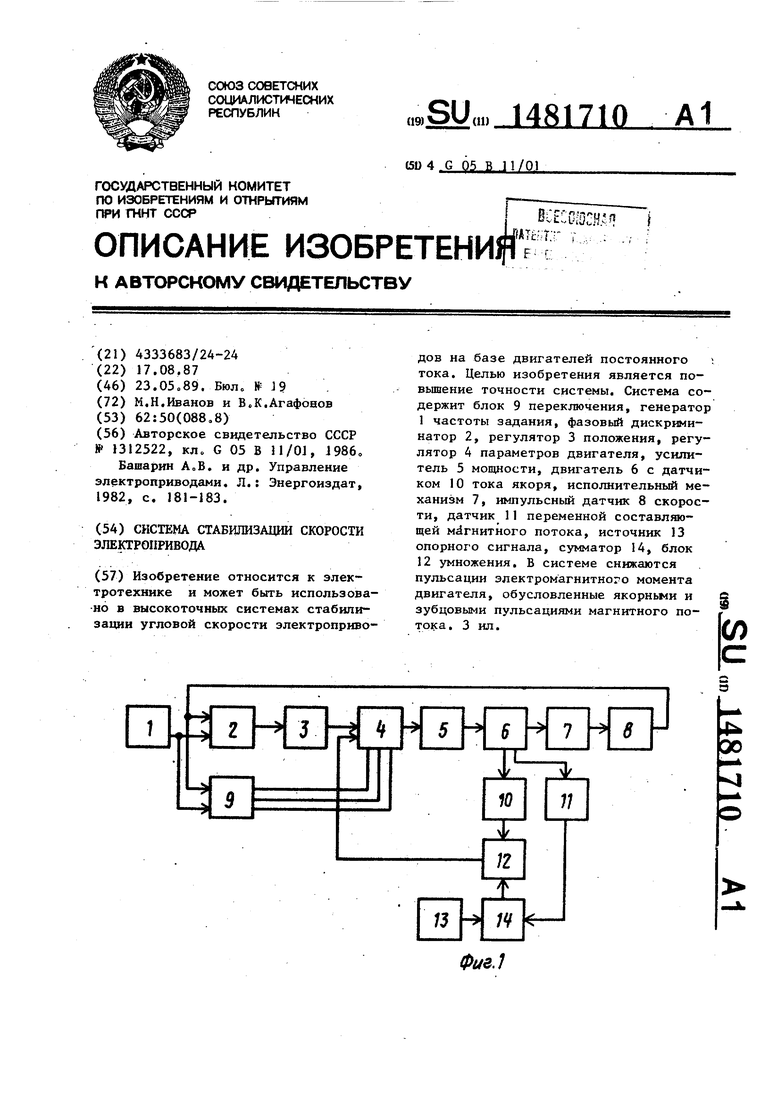
Фиг.1
Изобретение относится к электротехнике и может быть использовано в высокоточных системах стабилизации угловой скорости электроприводов на базе двигателей постоянного тока.
Цель изобретения - повышение точг ности системы путем ослабления пулы- саций электромагнитного момента двигателя
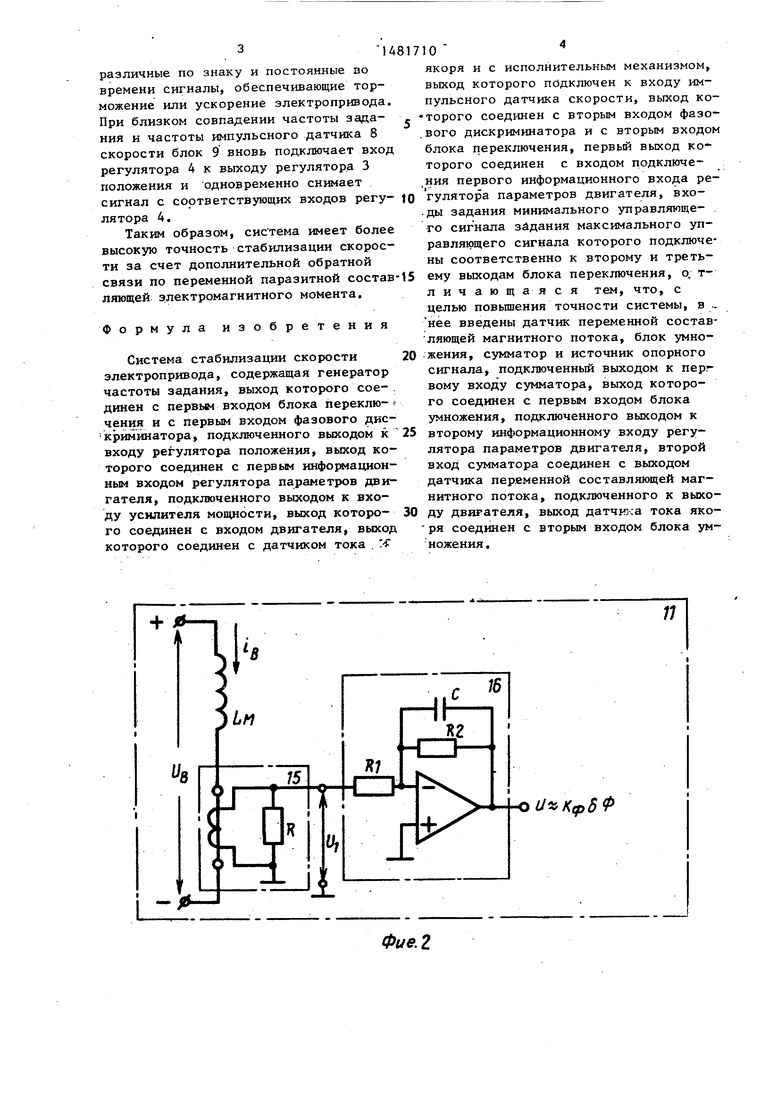
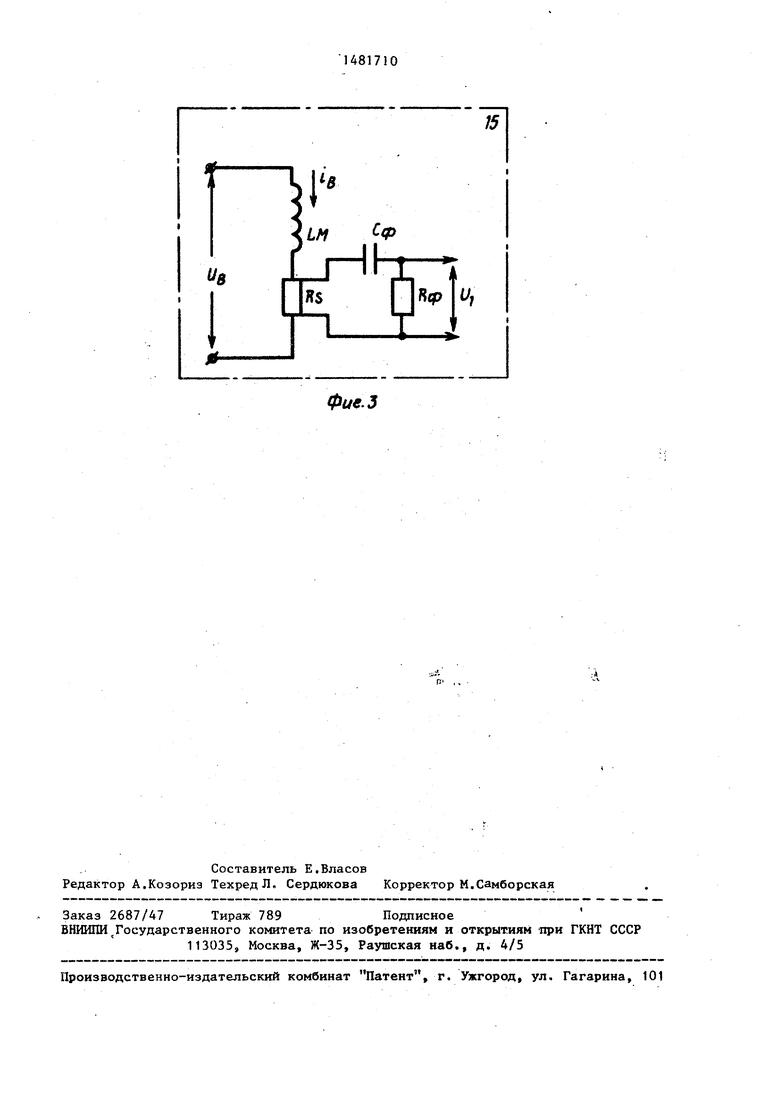
На фиг.1 приведена блок-схема сис1- темы} на фиг.2 - принципиальная электрическая схема датчика переменной составляющей магнитного потока; на фиг.З - принципиальная электрическая схема блока измерения производной магнитного потока,
Система стабилизации скорости электропривода содержит генератор .1 час тоты задания, фазовый дискриминатор 2, регулятор 3 положения, регулятор 4 параметров двигателя, усилитель 5 мощности, двигатель 6 постоянного тока, исполнительный механизм 7, импульсный датчик 8 скорости, блок 9 переключения, датчик 10 тока якоря, датчик 11 переменной составляющей магнитного потока , блок 12 умножения, источник J3 опорного сигнала и сумматор )4„
Датчик И переменно составляющей магнитного потока (фиг„2) содержит блок 15 измерения производной магнитного потока и блок 16 вычисления переменной составляющей магнитного потока, В качестве блока 15 измерения производной магнитного потока можно использовать измерительную обмотку, размещенную на главных полюсах двигателя 6 постоянного тока. Другой вариант приближенного измерения производной магнитного потока может быть реализован с помощью измерительного трансформатора тока (), включенного в цепь обмотки возбужде- ния двигателя 6 постоянного тока, либо с помощью датчика тока возбуждения (RS-шунт на фиг.З), подключенного к входу фильтра высоких частот (С-конденсатор и R-резистор на ), выход которого является выходом блока 15 измерения производной магнитного потока.
Блок 16 вычисления переменной составляющей магнитного потока может быть реализован либо в виде интегратора со сбросом, либо в виде инерционного звена (фиг.2).
o
5
0 5 0
5 0 5 л
5
Система стабилизации скорости электропривода работает следующим образом.
В режиме стабилизации скорости импульсы генератора 1 частоты задания поступают на вход фазового дискриминатора 2, на другой вход которого подаются импульсы с импульсного датчика 8 скорости. Выходное напряжение фазового дискриминатора 2 .преобразуется регулятором 3 положения и в виде задания на величину электромагнитного момента поступает на первый вход регулятора 4, где сравнивается с выходным напряжением блока 12. На вход блока 12 поступает напряжение с выхода датчика 10 тока якоря, пропорциональное току якоря двигателя 6„ На другой вход блока 12 умножения поступает с выхода сумматора 14 сумма выходных сигналов источника 13 опорного сигнала, пропорционального среднему значению магнитного потока и выходного напряжения датчика 11 переменной составляющей магнитного потока. I
Таким образом, блок 12 умножения осуществляет обратную связь по электромагнитному моменту Регулятор 4 определяет неравенство заданного и фактического значений момента и воздействует через усилитель 5 мощности на двигатель 6, подавляя тем самым пульсации электромагнитного момента, обусловленные пульсациями магнитно- го потока и другими причинами, например колебаниями напряжения питающей сети. При этом пульсации электромагнитного момента, обусловленные пульсациями магнитного потока, подавляются в быстродействующем контуре регулирования момента, слабо влияя на скорость электропривода. Степень подавления пульсаций скорости зависит от значения малой постоянной времени Тм.
В переходных режимах, когда изменяется частота генератора 1 частоты задания, на первом выходе блока 9 появляется сигнал, отключающий первый вход регулятора 4 от-выхода регулятора 3 положения. В зависимости от рассогласования частот задания и импульсного датчика 8 скорости с выходов блока 9 на соответствующие четвертый и пятый входы регулятора 4 электромагнитного момента поступают
различные по знаку и постоянные во времени сигналы, обеспечивающие торможение или ускорение электропривода
При близком совпадении частоты зада- s -торого соединен с вторым входом фазония и частоты импульсного датчика 8 скорости блок 9 вновь подключает вход регулятора 4 к выходу регулятора 3 положения и одновременно снимает
вого дискриминатора и с вторым входом блока переключения, первый выход которого соединен с входом подключе- ,ния первого информационного входа ресигнал с соответствующих входов регу- tO гулятора параметров двигателя, вхолятора 4.
Таким образом, система имеет более высокую точность стабилизации скорости за счет дополнительной обратной
связи по переменной паразитной состав-15 ему выходам блока переключения, о. т- ляющей электромагнитного момента.
Формула
изобретения
личающаяся тем, что, с целью повышения точности системы, в .. нее введены датчик переменной составляющей магнитного потока, блок умно- 20 жения, сумматор и источник опорного сигнала, подключенный выходом к первому входу сумматора, выход которого соединен с первым входом блока умножения, подключенного выходом к
личающаяся тем, что, с целью повышения точности системы, в .. нее введены датчик переменной составляющей магнитного потока, блок умно- 20 жения, сумматор и источник опорного сигнала, подключенный выходом к первому входу сумматора, выход которого соединен с первым входом блока умножения, подключенного выходом к
Система стабилизации скорости электропривода, содержащая генератор частоты задания, выход которого соединен с первым входом блока переклю- чения и с первым входом фазового дискриминатора, подключенного выходом к 25 второму информационному входу регу- входу регулятора положения, выход ко- лятора параметров двигателя, второй торого соединен с первым информационным входом регулятора параметров двигателя, подключенного выходом к входу усилителя мощности, выход которо- 30 ду двигателя, выход датчика тока яко- го соединен с входом двигателя, выход - ря соединен с вторым входом блока ум- которого соединен с датчиком тока .- ножения.
вход сумматора соединен с выходом датчика переменной составляющей магнитного потока, подключенного к выхо1481710 4
якоря и с исполнительным механизмом, выход которого подключен к входу импульсного датчика скорости, выход кового дискриминатора и с вторым входом блока переключения, первый выход которого соединен с входом подключе- ,ния первого информационного входа ре.ды задания минимального управляющего сигнала задания максимального управляющего сигнала которого подключены соответственно к второму и третьему выходам блока переключения, о. т-
личающаяся тем, что, с целью повышения точности системы, в .. нее введены датчик переменной составляющей магнитного потока, блок умно- жения, сумматор и источник опорного сигнала, подключенный выходом к первому входу сумматора, выход которого соединен с первым входом блока умножения, подключенного выходом к
второму информационному входу регу- лятора параметров двигателя, второй ду двигателя, выход датчика тока яко- ря соединен с вторым входом блока ум- ножения.
второму информационному входу регу- лятора параметров двигателя, второй ду двигателя, выход датчика тока яко- ря соединен с вторым входом блока ум- ножения.
вход сумматора соединен с выходом датчика переменной составляющей магнитного потока, подключенного к выхоФие.2
фие.З
| Следящий привод | 1986 |
|
SU1312522A1 |
| Башарин А„В | |||
| и др | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с | |||
| Водяные лыжи | 1919 |
|
SU181A1 |
