I
Изобретение относится к автоматике и может быть использовано в системах автоматического управления технологическими процессами.
Цель изобретения - увеличение полноты контроля,
I
На фиг Л приведена функциональная схема устройства на фиг.2 - схема электропривода; на фиг,3 - схемы таймеров; на фиг.4 - диаграмма работы привода,
Устройство содержит электропри- вод 1, первый и второй регистры 2 и 3 сдвига, первый и второй компараторы 4 и 5, первый и второй таймеры 6 и 7, первый и второй вычитатели 8 и 9, сумматор-вычнтатель 10, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 11, триггер 12, пер- вый, третий., второй, четвертый и пятый элементы И 13-17, элемент 2И-2ИЛИ 18, элемент 4Ш1И-НЕ 19. Входы 20-26 устройства, выходы 27 и 28 устройства, входы и выходы блоков устройст- ва 29-72.
На функциональной схеме линии передачи кода отмечены символом /. Функциональная схема (фиг.2) возможного варианта реализации электропри- вода 1 содержит преобразователь код - аналог 73, усилитель 74, двигатель 75, редуктор 76, преобразователь угол - код 77. На вход 39 поступает код управляющего воздействия, преобразуемый в аналоговый сигнал, который
управляет двигателем 75, вращающим через редуктор 76 преобразователь угол - код 77. По сигналу опроса на входе 40 на выходе преобразователя угол - код 77 формируется код, пропорциональный положению выходного вала привода.«
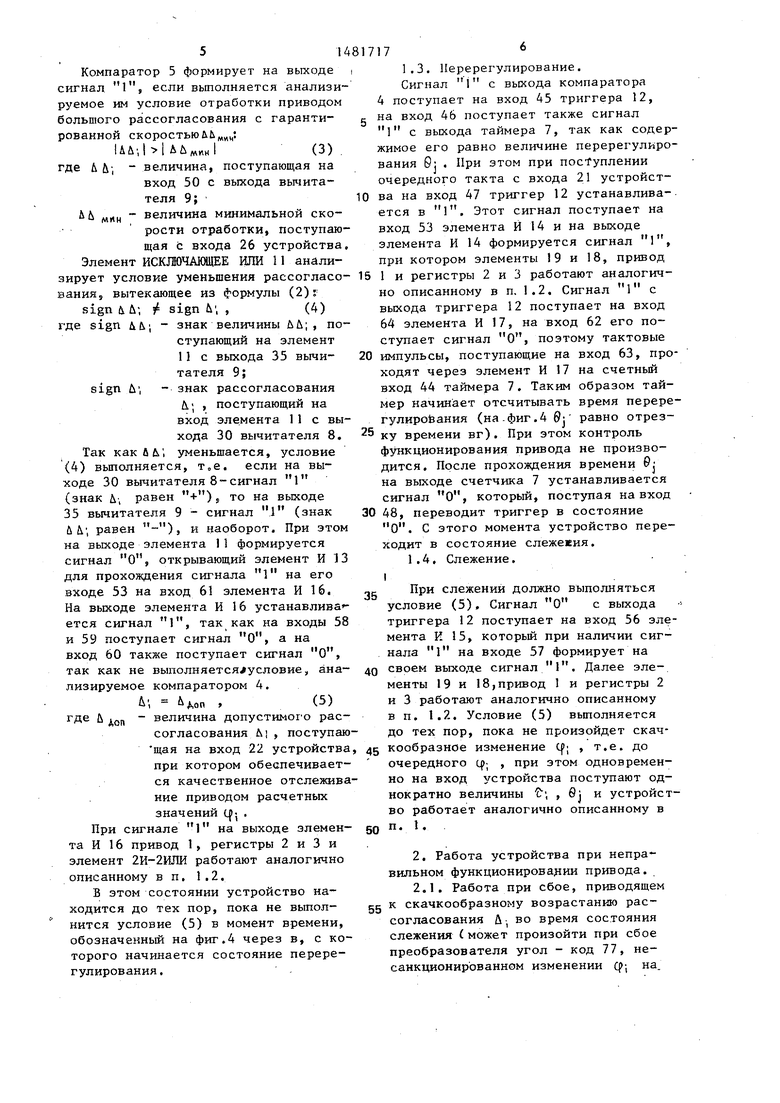
Функциональная схема (фиг.З) таймеров 6и7 содержит элемент И 78, счетчик 79 и элемент ИЛИ 80. На вход 43 поступает код, записываемый в счетчик 79. С выхода счетчика 79 этот код поступает на элемент ИЛИ 80, который анализирует равенство О содержимого счетчика 79. Если содержимое не равно Оу то на выходе формируется сигнал 1, открывающий элемент И 78 для прохождения на счетный вход счетчика 79 импульсов на входе 44, Эти импульсы приводят к уменьшению содержимого счетчика 79. Когда содержимое счетчика 79 будет равно 0, на выходе элемента ИЛИ 80 и выходе таймеров 6 и 7 формируется сигнал О, закрывающий элемент И 78. В таком состоянии таймеры 6 и 7 будут находиться до поступления кода на вход 43.
Регистры 2 и 3 представляют собой регистры сдвига. По переднему фронту импульсов на входе 42 код с входа 41 передается на выход регистров и запоминается в них,
Триггер 12 по сигналу 1 на син- t 1 хронизирующем входе 47 устанавливаетv
3.1
ся в 1 (на выходе триггера сигнал 1) при наличии в этот момент времени на входах 45 и 46 сигналов 1. Триггер 12 устанавливается в 0 по сигналу О на входе 48 или сигналу 1 на входе 49.
Устройство работает следующим образом.
1. Работа устройства при правиль- ном функционировании привода.
1.1. После включения устройства начинают непрерывно поступать на вход 21 тактовые импульсы с частотой равной дискретности по времени при- вода, длительность импульсов значительно меньше периода их следования (далее значения, привязанные по времени к этим тактам, будем обозначать значком i, считая i от 1 до со) на вход 20 - расчетное значение угла поворота привода; на вход 25 - величина расчетного значения скорости привода , представленная углом поворота привода за время, равное одно му такту импульсов на входе 21.
С поступлением первого тактового импульса однократно поступают представленные импульсным кодом (длительность импульсов менее длительности тактовых на входе 21), на вход 23 - величина максимальной длительности переходного процесса привода , вызванная возмущающим воздействием Cfj , поступившим в те моменты времени i, обозначенные через j (j принимает значения от 1 до п), когда происходи скачкообразное изменение на входе 20; на вход 24 величина максимальной длительности перерегулирования привода 0: , вызванная воздействием .
.Тактовые импульсы поступают на привод 1, опрашивая преобразеватель 77, при этом на выход привода посту- пает код фактического положения выходного вала q , привода, этот код поступает на вычитатель 8, на другой вход его поступает значение с входа 20 устройства, на выходе 29 вычитателя 8 формируется текущее рассогласование по положению
Д, - (О
На выходе 30 устанавливается сигнал О, если &; отрицательное. Код Јj с входа 23 устройства поступает на таймер 6, тем самым формируя на его выходе сигнал 1. Этот сигнал поступает на вход 49 триггера 12, ус-25
817
г
Ю
, 15 ; 20
303540
д5 «j 5517
танавливая его в состояние О, ступает на вход 69 элемента 4ИЛК-НЕ 19, устанавливая на выходе этого элемента сигнал О, по которому элемент 2И-2ИЛИ 18 открыт для прохождения на выход рассогласования А;, на входе 65. С выхода элемента 2И-2ИЛИ 18 рассогласования Д; поступает на выход 28 устройства и на вход 39 привода 1, тем самым привод производит отработку этого рассогласования.
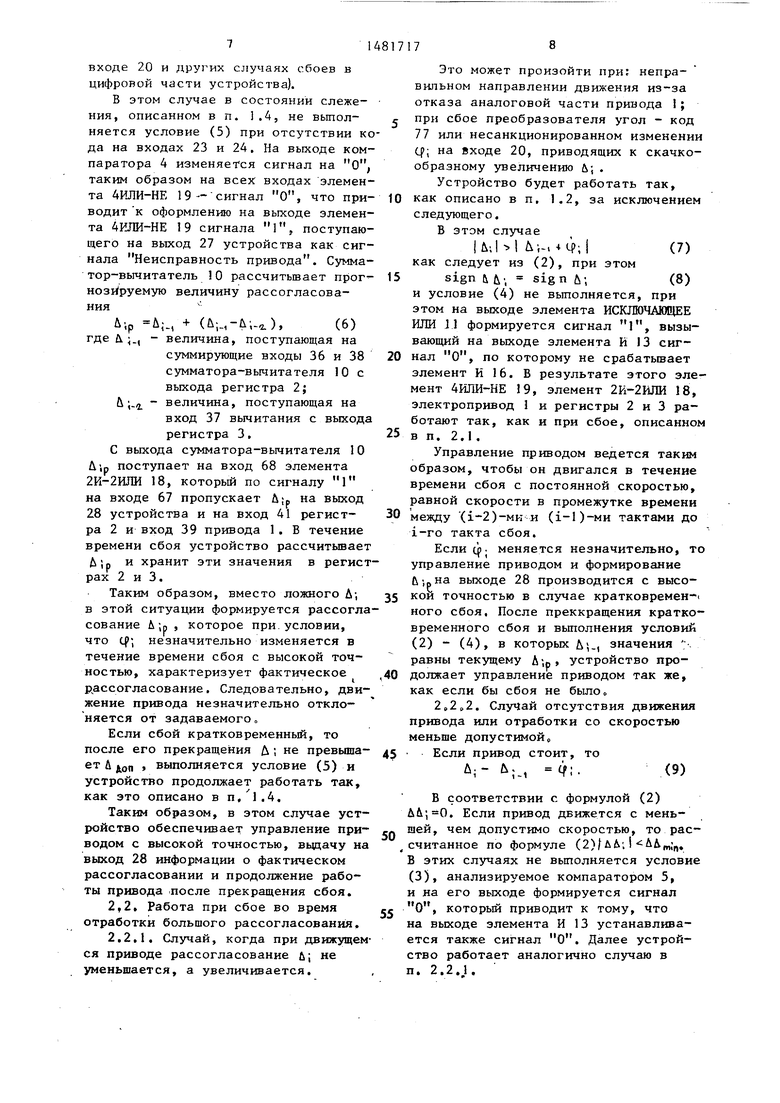
На фиг.4 изображены изменения ср; , , А; во времени t. Точка а - начало работы устройства, в этот момент рассогласование Л; велико и привод начинает отрабатывать это рассогласование. Рассогласование с выхода элемента 2И-2ИЛИ 18 поступает также на вход 41 регистра 2, по переднему фронту тактового импульса, поступающего на синхронизирующий вход 42, регистр 2 формирует на своем выходе и запоминает это значение в такт i+1, т.е. в течение i-такта на выходе регистра формируется Ь;, . Это значение поступает на вход 41 регистра 3, который аналогично регистру 2 сдвигает рассогласование на один такт, формируя на- своем выходе рассогласование . Таймер 6 отсчитывает записанное в него время , по истечении которого (точка б на фиг.4) на выходе таймера устанавливается сигнал О. К этому моменту должен окончиться переходной процесс привода, вызванный скачкообразным возмущением на входе.20, Далее рассмотрим работу устройства при плавном изменении, (f,, как это изображено на фиг.4.
1.2, Отработка большего рассогласования .
Вычнтатель 9 рассчитывает скорость изменения рассогласования, обеспечиваемую приводом
ЬЛ; М -&;., , (2) где Л , Д ;, - рассогласования в текущий и предыдущий такт, поступающие соответственно на входы 33 и 31; ( - расчетное значение скорости изменения Cf; , поступающее на вход 32.
I На выход 34 вычитателя 9 поступает
код Д&; , на выход 35 - знак величины Ли; .
514
Компаратор 5 формирует на выходе сигнал 1, если выполняется анализируемое им условие отработки приводом большого рассогласования с гаранти- ровакной скоростью ЛЬ тии:
1Лй, АЬжт,|(3)
где &&, - величина, поступающая на вход 50 с выхода вычита- теля 9;
U& мин величина минимальной скорости отработки, поступающая с входа 26 устройства. Элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 11 анализирует условие уменьшения рассогласо- вания, вытекающее из формулы (2)s
sign ЬД; sign Ь1, , (4) где sign &&; - знак величины Дй,, поступающий на элемент 11 с выхода 35 вычи- тателя 9;
sign U1, - знак рассогласования Л; , поступающий на вход элемента 11 с выхода 30 вычитателя 8. Так какй&; уменьшается, условие (4) выполняется, т.е. если на выходе 30 вычитателя 8-сигнал 1 (знак А, равен +), то на выходе 35 вычитателя 9 - сигнал 1 (знак U А; равен -), и наоборот. При этом на выходе элемента 11 формируется сигнал О, открывающий элемент И 13 для прохождения сигнала 1 на его входе 53 на вход 61 элемента И 16. На выходе элемента И 16 устанавлива - ется сигнал 1, так как на входы 58 и 59 поступает сигнал О, а на вход 60 также поступает сигнал О, так как не выполняется/условие ана- лизируемое компаратором 4.
А; &мп (5) где A on - величина допустимо о рассогласования &, поступаю щая на вход 22 устройства при котором обеспечивается качественное отслеживание приводом расчетных значений .
При сигнале 1 на выходе элемен- та И 16 привод 1, регистры 2 и 3 и элемент 2И-2ШШ работают аналогично описанному в п. 1.2.
В этом состоянии устройство находится до тех пор, пока не выпол- нится условие (5) в момент времени, обозначенный на фиг.4 через в, с которого начинается состояние перерегулирования.
176
1.3.Перерегулирование. Сигнал 1 с выхода компаратора
4 поступает на вход 45 триггера 12, на вход 46 поступает также сигнал 1 с выхода таймера 7, так как содержимое его равно величине перерегулирования 0: . При этом при поступлении очередного такта с входа 21 устройства на вход 47 триггер 12 устанавливается в 1. Этот сигнал поступает на вход 53 элемента И 14 и на выходе элемента И 14 формируется сигнал 1, при котором элементы 19 и 18, привод 1 и регистры 2 и 3 работают аналогично описанному в п. 1.2. Сигнал 1 с выхода триггера 12 поступает на вход 64 элемента И 17, на вход 62 его поступает сигнал О, поэтому тактовые импульсы, поступающие на вход 63, проходят через элемент И 17 на счетный вход 44 таймера 7. Таким образом таймер начинает отсчитывать время перерегулирования (на фиг.4 8 равно отрезку времени вг). При этом контроль функционирования привода не производится. После прохождения времени б: на выходе счетчика 7 устанавливается сигнал 0м, который, поступая на вход 48, переводит триггер в состояние О. С этого момента устройство переходит в состояние слежекия.
1.4,Слежение.
I
При слежении должно выполняться условие (5), Сигнал О с выхода триггера 12 поступает на вход 56 элемента И 15, который при наличии сигнала 1 на входе 57 формирует на своем выходе сигнал 1. Далее элементы 19 н 18,привод 1 и регистры 2 и 3 работают аналогично описанному в п. 1.2. Условие (5) выполняется до тех пор, пока не произойдет скачкообразное изменение (f; , т.е. до очередного , при этом одновременно на вход устройства поступают однократно величины Ј; , S; и устройство работает аналогично описанному в п. 1.
2. Работа устройства при неправильном функционировании привода.
2.1. Работа при сбое, приводящем к скачкообразному возрастанию рассогласования U во время состояния слежения ( может произойти при сбое преобразователя угол - код 77, несанкционированном изменении на.
входе 20 и других случаях сбоев в цифровой части устройства).
В этом случае в состоянии слеже- ния, описанном в п. 1.4, не выполняется условие (5) при отсутствии кода на входах 23 и 24. На выходе компаратора 4 изменяется сигнал на О, таким образом на всех входах элемента 4ИЛИ-НЕ 19-- сигнал О, что приводит к оформлению на выходе элемента 4ИЛИ-НЕ 19 сигнала 1, поступающего на выход 27 устройства как сигнала Неисправность привода. Сумма- тор-вычитатель 10 рассчитывает прогнозируемую величину рассогласования
й ,р -,--, + ь-м-ь ;-.), (6) где Д ;, - величина, поступающая на суммирующие входы 36 и 38 сумматора-вычитателя 10 с выхода регистра 2; U .г - величина, поступающая на
вход 37 вычитания с выхода регистра 3,
С выхода сумматора-вычитателя 10 Д ,р поступает на вход 68 элемента 2К-2ИЛИ 18, который по сигналу 1 на входе 67 пропускает Д;. на выход 28 устройства и на вход 41 регистра 2 и вход 39 привода 1. В течение времени сбоя устройство рассчитывает Д;р и хранит эти значения в регистрах 2 и 3.
Таким образом, вместо ложного Д; в этой ситуации формируется рассогласование А ;р , которое при условии, что Cf , незначительно изменяется в течение времени сбоя с высокой точностью, характеризует фактическое рассогласование. Следовательно, движение привода незначительно отклоняется от задаваемого0
Если сбой кратковременный, то после его прекращения Д ; не превышает u jyjn , выполняется условие (5) и устройство продолжает работать так, как это описано в n, l.4.
Таким образом, в этом случае устройство обеспечивает управление приводом с высокой точностью, выдачу на выход 28 информации о фактическом рассогласовании и продолжение работы привода .после прекращения сбоя.
2,2. Работа при сбое во время отработки большого рассогласования.
2.2.1. Случай, когда при движущемся приводе рассогласование и; не уменьшается, а увеличивается.
Это может произойти при: неправильном направлении движения из-за отказа аналоговой части привода 1; г при сбое преобразователя угол - код 77 или несанкционированном изменении Cf; на входе 20, приводящих к скачкообразному увеличению Д; .
Устройство будет работать так, 0 как описано в п. 1.2, за исключением следующего.
В этом случае
|Л;Ы Ь ,-. (7) как следует из (2), при этом
5 sign Ь Д. sign u; (8) и условие (4) не выполняется, при этом на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ Л формируется сигнал 1, вызывающий на выходе элемента И J 3 сиг0 нал О, по которому не срабатывает элемент И 16. В результате этого элемент 4ИЛИ-НЕ 19, элемент 2К-2ИЛИ 18, электропривод 1 и регистры 2 и 3 работают так, как и при сбое, описанном
5 в п. 2.1.
Управление приводом ведется таким образом, чтобы он двигался в течение времени сбоя с постоянной скоростью, равной скорости в промежутке времени
0 между (i.2)-MK и (i-l)-MH тактами до i-ro такта сбоя.
Еслиц). меняется незначительно, то управление приводом и формирование Ь;. на выходе 28 производится с высо5 кои точностью в случае кратковремен- ного сбоя, После преккращения кратковременного сбоя и выполнения условий (2) - (4), в которых Д;., значения равны текущему Д-,р, устройство про- 0 должает управление приводом так же, как если бы сбоя не было
2е2„2. Случай отсутствия движения привода или отработки со скоростью меньше допустимой,
5 Если привод стоит, то
U;- ;., JI. О)
В соответствии с формулой (2) . Если привод движется с мень шей, чем допустимо скоростью, то рас-
t считанное по формуле (2)| А&11 A&mJu
В этих случаях не выполняется условие
(3), анализируемое компаратором 5,
и на его выходе формируется сигнал
е О, который приводит к тому, что на выходе элемента И 13 устанавливается также сигнал О. Далее устройство работает аналогично случаю в п. 2.2.1.
Таким образом, выявляется неправильная отработка большого рассогласования, когда, в частности, рассог ласование уменьшается за счет соответ- ствующего изменения расчетного значения угла.
Формула изобретения
Устройство для функционального контроля электропривода, содержащее первый компаратор, первый и второй регистры сдвига, первый и второй вы- читатели, первый и второй элементы И элемент 2И-2ИЛИ, вход уменьшаемого первого вычитателя является первым установочным входом устройства, вход вычитаемого - информационным входом устройства, а первый выход подключен к первому входу первого компаратора, второй вход которого является вторым установочным входом устройства, о т- личающееся тем, что, с целью увеличения полноты контроляs в устройство введены первый и второй таймеры, сумматор-вычитатель, второй компаратор, с третьего по пятый элементы И, элемент 4ИЛИ-НЕ, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и триггер, синхро- вход которого, первый вход пятого элемента И, синхровходы первого таймера, первого и второго регистров сдвига являются синхровходом устройства и выходом устройства для подключения к синхровходу объекта контроля выход триггера соединен с первыми входами элементов И с второго по четвертый и с вторым входом пятого элемента И, выходом подсоединенного к синхровходу второго таймера, устано- вочный вход которого и установочный вход первого таймера являются третьим и четвертым установочными входами устройства соответственно, выход первого элемента задержки подключен к первому входу сброса триггера, к третьему входу пятого элемента И, к вторым входам элементов И с второго
д 5 0 5 0 0 е
5
по четвертый и к первому входу элемента 4ИЛИ-НЕ, выход второго элемента задержки соединен с вторым входом сброса триггера и с первым входом установки триггера, выход первого компаратора соединен с вторым установочным входом триггера и с третьими входами второго и четвертого элементов И, вход одного вычитаемого второго вычитателя и первый вход второго компаратора являются пятым и шестым установочными входами устройства соответственно, первый выход первого вычитателя соединен с входом уменьшаемого второго вычитателя и с первым входом элемента 2И-2ИЛИ, выход которого является выходом устройства для подключения к входу данных объекта контроля, информационным выходом устройства и подключен к входу данных первого регистра сдвига, выходом соединенного с входом данных второго регистра сдвига, выход которого подключен к входу вычитаемого сумматора- вычитателя, выход которого подключен к второму входу элемента 2И-2ИЛИ, выходы элементов И с второго по четвертый подключены к входам соответственно с второго по четвертый элемента 4ИЛИ-НЕ, выход которого является управляющим выходом устройства и подключен к третьему и четвертому входам элемента 2И-2ИЛИ, выход первого регистра сдвига соединен с входом вычитаемого второго вычитателя и с входами первого и второго слагаемых сумматора -вычитателя, первьй выход второго вычитателя подключен к второму входу второго компаратора, вторые выходы первого и второго вычитателей соединены с соответствующими входами элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого и выход второго компаратора подключены к соответствующим входам первого элемента И, выходом подсоединенного к четвертому входу четвертого элемента И.
Фиг. г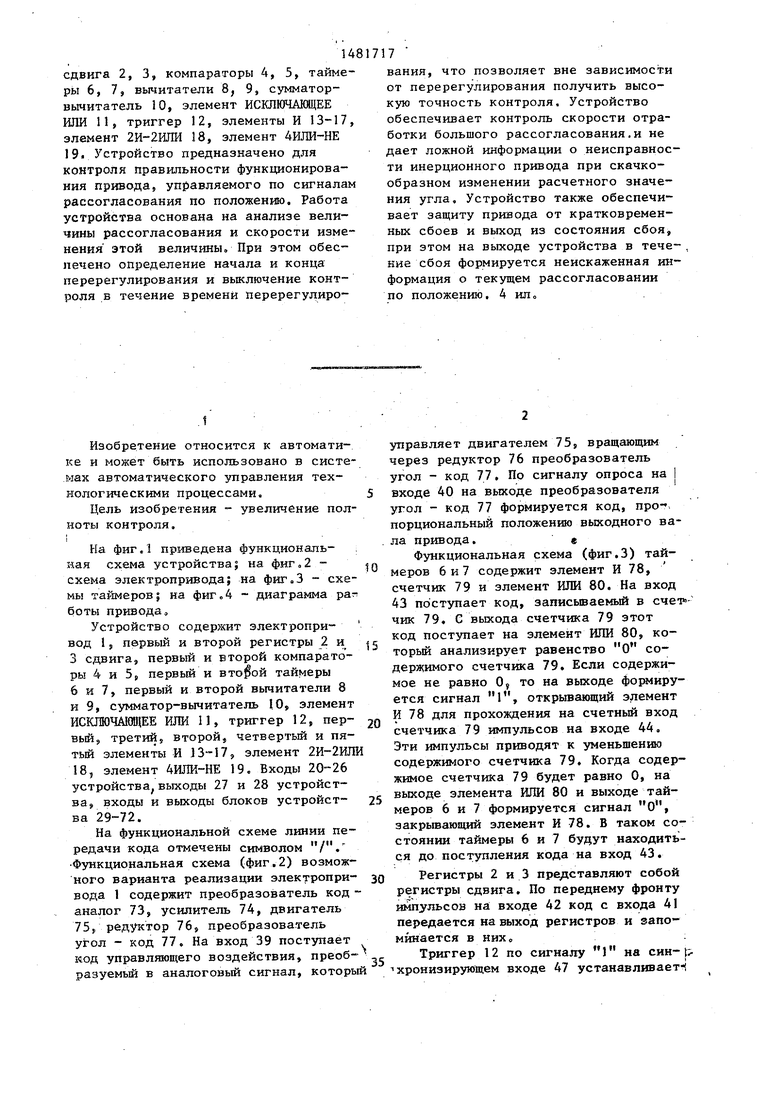


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Устройство для управления электроприводом | 1977 |
|
SU739468A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Регулятор | 1990 |
|
SU1803906A1 |
| Устройство для функционального контроля цифрового привода | 1975 |
|
SU670925A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| Преобразователь синусно-косинусных сигналов в последовательность импульсов | 1988 |
|
SU1737731A1 |
| Устройство для умножения @ -разрядных чисел | 1984 |
|
SU1256018A1 |
| Многоканальное устройство тестового контроля логических узлов | 1990 |
|
SU1837295A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |

Изобретение относится к автоматике и может быть использовано в системах управления технологическими процессами. Цель изобретения - увеличение полноты контроля. Устройство содержит электропривод 1, регистры сдвига 2, 3, компараторы 4, 5, таймеры 6, 7, вычитатели 8, 9, сумматор-вычитатель 10, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 11, триггер 12, элементы И 13-17, элемент 2И-2ИЛИ 18, элемент 4ИЛИ-НЕ19. Устройство предназначено для контроля правильности функционирования привода, управляемого по сигналам рассогласования по положению. Работа устройства основана на анализе величины рассогласования и скорости изменения этой величины. При этом обеспечено определение начала и конца перерегулирования и выключение контроля в течение времени перерегулирования, что позволяет вне зависимости от перерегулирования получить высокую точность контроля. Устройство обеспечивает контроль скорости отработки большого рассогласования. И не дает ложной информации о неисправности инерционного привода при скачкообразном изменении расчетного значения угла. Устройство также обеспечивает защиту привода от кратковременных сбоев и выход из состояния сбоя, при этом на выходе устройства в течение сбоя формируется неискаженная информация о текущем рассогласовании по положению. 4 ил.
а 6 6
Фи&З
| Устройство для функционального контроля цифрового привода | 1975 |
|
SU670925A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1974 |
|
SU739469A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
