сравнения, второй вход которого подключен к третьему выходу цифрового вычислительного блока, третий - к второму выходу блока формирования ошибки. Выходы блока сравнения соединены соответственно с вторым и третьим входами блока контроля скорости, третьим и четвертым входами блока фиксации сбоя, нятый и шестой входы которого подключены к соответствующим выходам блока контроля скорости. Второй вход блока фиксации отказа подключен к четвертому выходу цифрового вычислительного блока, третий вход - к второму выходу цифрового вычислительного блока, четвертый вход блока контроля скорости соединен с выходом элемента И, вход блока формирования ошибки подключен к второму входу элемента И.
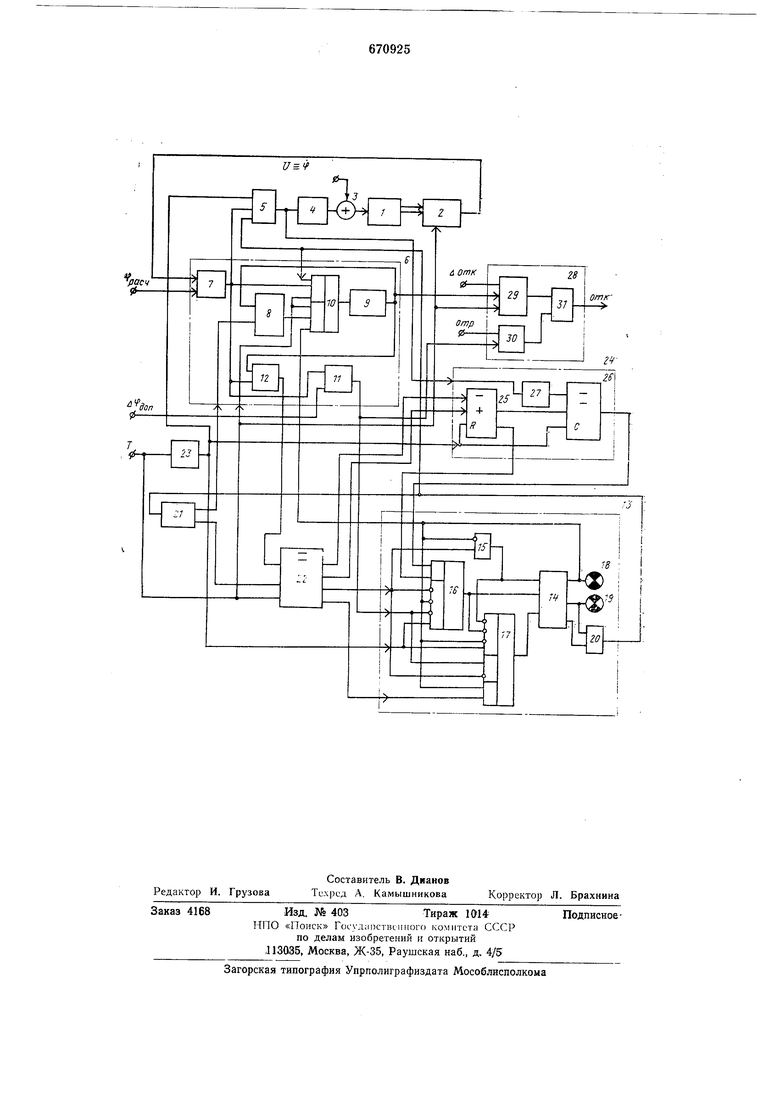
Структурная схема устройства представлена на чертеже.
Устройство содержит привод 1, кинематически связанный € преобразователем 2 угол-код, суммирующий элемент 3, преобразователь 4 код-напряжение, элемент И 5, цифровой вычислительный блок 6, в состав которого входят первый блок 7 вычитания, сумматор 8, регистр 9, элемент ЗИ-ИЛИ 10 и второй 11 и третий 12 блоки вычитания, блок 13 фиксации сбоя, содержащий триггер 14, элемент И 15, нервый 16 и второй 17 логические элементы, индикаторы 18 и 19 и элемент ИЛИ 20, блок 21 формирования ошибки, блок 22 сравнения, делитель 23 частоты, блок 24 контроля скорости, в состав которого входят счетчик 25, элемент 26 сравнения и цифровая модель привода 27, блок 28 фиксации отказа, содержащий блок 29 вычитания, триггер 30 и элемент И 31.
Счетчик 25 производит изменение содержимого на «1 в зависимости от того, приходит сигнал «1 на счетный вход сложения или вычитания. С одного выхода счетчика па элемент 26 сравнения поступает код, пропорциональный содержимому счетчика, с другого на вход блока 13 подается сигнал логической «1, если знак содернсимого счетчика «-Ь, а если «-, то «О. Обнуляется счетчик сигналами с выхода делителя 23 частоты.
Устройство работает следующим образом.
Привод 1 управляется по сигналам суммирующего элемента 3, на один вход которого поступает напряжение, пропорциональное ф (скорости изменения заданного угла поворота), на другой - напряжение преобразователя 4 код-напряжение.
На вход ф ., ч устройства поступает код, пропорциональный расчетному значению угла поворота, кодируемого преобразователем 2 угол-код, который формирует код ФФ , характеризующий фактическое положение кодируемого вала.
Опрос преобразователя угол-код производится по сигналам тактовых импульсов, поступающих на вход Т устройства с частотой, соответствующей повороту кодируемого вала за время между опросами 5 не более чем на единицу младшего разряда преобразователя.
На выходе блока 7 вычитания образуется код рассогласования по положению
Дф- фрасч-фф .(1)
Если блок 3 сигнализирует о правильной работе устройства, при этом на выходе триггера 14 и соответственно на выходе блока 20 устанавливается сигнал логиче) ской «1, то элемент И 5 по сигналу с выхода делителя 23 частоты, идущему с частотой - (п- коэффициент деления делителя), открывается, пропуская код рассогласования по положению на преобразователь 4 код-напряжение. Напряжение с выхода его, складываясь на суммирующем элементе 3 с напряжением, пропорциональным ф, поступающим па вход устройства,
формирует напряжение, управляющее приводом
(2)
фрасч+ Д РОбозначим через i-1, i, i-f I (и т. д.) моменты времени поступления тактовых импульсов и через ; - моменты времени поступления тактовых импульсов, кратных п. совпадающие с поступлением сигналов с
выхода делителя 23 частоты. Если рассматривается t-й момент времени, то Аф i - рассогласование по положению в предыдущий момент времени. Оно хранится в регистре 9.
Блок 12 вычитания формирует код, пропорциональный разности
(3)
б ф;-фС-1.
Блок 22 по сигналу тактовых импульсов производит сравнение этого кода с единицей младшего разряда (р„).
Если 6 -ф , то на первом выходе блока 22 устанавливается сигнал логической «1, а на всех других выходах - сигналы логического «О. Если б +фм , то на втором выходе появляется сигнал логической «1, а на всех других - «О. В том случае, когда б О, на всех выходах блока
22 - сигнал логического «О.
При 1б/ ф„на третьем выходе блока 22 устанавливается сигнал логической «1, при сигнале «О на выходе блока 13 на выходах блока 21 формирования ошибки образуются сигналы «О, на четвертом выходе блока 22 также всегда сигнал логического «О.
Принятый алгоритм контроля справедлив для приводов, работающих без перерегулирования и после окончания переходного процесса от включения приводов в работу и до начала переходного процесса выключения их. Условие правильности выдерживания приводом скорости обработки рассогласования по положению имеет вид /16/-/ ЛтДф1 /. я+« У где п - коэффициент деления делителя 23 частоты; Y - масштабный коэффициент; Кт - передаточная функция блока 27; А - заданная постоянная величина; Аср1„ -рассогласование по положению на выходе элемента И 5, сформированное по приходу тактового импульса i ; V б - угол поворота кодируемого вала за промежуток времени in + п. Знак этого выражения свидетельствует об увеличении или уменьшении рассогласовании но положению. Алгоритм контроля правильности работы цифровых и аналого-цифровых элементов устройства, к которым относятся преобразователь 2 угол-код, блок 7 вычитания и другие цифровые элементы устройства, а также правильность поступающего кода срра,.,, , основан на том, что в подавляющем большинстве случаев при их неисправности выполняется неравенство /6/(f.,(5) в отличне от неравенства f- ff., которое всегда выполняется при неисправности аналоговых элементов привода или недопустимом росте возмущающих воздействий на привод, а также неисправности преобразователя 4 код-напряжение. Отработкой большого рассогласования будем называть далее режим работы привода, когда ,„„, где Лфдоп -допустимое максимальное рассогласование по положению в установившемся режиме слежения. Этот режим обычно наступает после включения нривода или же переведения по новым значениям фрасч ; на вход ОТР триггера 30 подается снгнал, переводящий его в состояние «О, при котором на выходе устанавливается сигнал логического «О. Если в рассматриваемом случае происходит режим отработки большого рассогласования, то счетчик 25 формирует код, пропорциональный 1 б выражения (4), элемент 26 сравнивает но приходу нмнульса с выхода делнтеля 23 частоты этот код с кодом, поступающим с цифровой модели привода 27. Ёслн неравенство (4) выполняется, то на выходе элемента 26 сравнения устанавливается сигнал логического «О, счетчик 25 обнуляется, а элемент 26 остается в этом состоянии до момента следующего тактового импульса i., + п. При правильной работе привода в этом ,.+ режиме выполняется условие б О, так как рассогласование за этот промежуток времени должно уменьшаться, при этом на второй вход 2 блока 13 поступает сигнал логического «О. В результате этого элемент 16 по импульсу 1„ + п не срабатывает, элемент 15 также не срабатывает, а срабатывает элемент 17. устанавливая триггер 14 в положение, при котором на его третьем выходе появляется снгнал логической «1, свидетельствующий о исправности устройства. Этот сигнал передается на элемент ЗИ-ИЛИ 10, нриводя к тому, что код текущего рассогласования по положению поступает в регистр 9. По приходу всех остальных тактовых импульсов, кроме кратных п. на третьем выходе блока 22 сравнения также формируется сигнал логического sO, поэтому элементы 15-17 выдают сигчал «О и положение трнггера 14 остается прежннм, в то время как по сигналам тактовых импульсов через элемент ЗИ-ИЛИ 10 содержнмое регистра 9 обновляется. Когда нрнвод отработает большое рассогласование до величины, меньшей Аф ,„„ (будем называть в дальнейшем это состояние режимом слежения), на выходе блока 11 вычнтания формируется сигнал логической «1, так как Лфд,,,, /Aq;/ О, при этом срабатывает логический элемент 17, устанавливая триггер 14 в состояние, соответствующее фиксации правильной работы устройства вне зависимости от сигналов блока контроля 24 скорости. Сигналом «1 с выхода блока И вычитания, триггер 30 переводится в состояиие «1, при котором на элемент И 31 поступает снгнал «1. Блок 29 вычитания определяет с частотой поступления тактовых импульсов нрсвышение рассогласования по положению величины точки отказа Афтк . на выходе его устанавливается снгнал «1, если АО.И-/АФ,.(9) Значение АОТК больше Аф,„п и равно максимальной велнчине рассогласования по положению, нрн котором дальнейшая работа устройства невозможна и следует переключатр ся на резервное оборудование нлн же нредпринимат другие действия по перестройке технологичеекого процееса.
При исправности устройства на выходе б.юка 29 вычитания устанавливается сигпал «О и Eia выходе элемента И 31 сигнал «отказ не формируется.
Рассмотрим работу устройства при различных возможных неисправностях.
Пусть в режиме слежения происходит кратковременный сбой в выработке значений фр;,..„ , ф.н или Aff, являющийся следствием сбоев нреобразователя 2 «угол-код или блока 7 вычитания, или других цифровых узлов, например регистра 9, блока 12 вычитания и т. п. При этом не выполняется условие (5). В этом случае на третьем выходе блока 22 сравнения появляется сигнал «I, приводящий к срабатыванию логического элемента 15 и наложению запрета на срабатывание элементов 16 и 17. Триггер 14 переходит в состояние, фиксирующее сбой цифровой части устройства, о чем сигнализирует индикатор 18. На первом выходе триггера 14 устанавливается сигнал «1, на выходе элемента ИЛИ 20 - сигнал «О, закрывающий элемент И 5.
В соответствии с выражением (2) управление приводом при этом осуществляется
лищь по скорости фрасч- При ЭТОМ из-за неидеального выдерживания приводом скорости фрасч и наличия ф „аг., ПРОИСХОДИТ
медленное нарастание фактической ощибки, поэтому, начиная с /-го тактового импульса-момента выявления сбоя, код рассогласования по положению определяется как
k
Афг, /Дф,-,,/+ / УЛ.одп / (10) / -1
где /С-момент прекращения сбоя, привязанный к тактовому импульсу; Л ухода f - величина нарастания ощибки по положению за время, равное одному такту, при управлении приводом только по скорости.
Величина эта формируется на выходе блока 21, связанном с сумматором 8. Реализуется выражение (10) сумматором 8 и элементом ЗИ-ИЛИ 10, который пропускает код сумматора в регистр 9 каждый раз по приходу тактовых импульсов.
Блок 22 производит сравнение кода 5 с величиной Q, поступающей с выхода блока 21, связанного с вторым входом блока 22.
Выражение (10) определяет максидгальную величину рассогласования в течение времени сбоя.
Условие прекращения сбоя имеет вид
Q /Лф к/- /Аф А ухода / 0. (11)
при этом на четвертом выходе блока 22 сравнения формируется сигнал «1, приводящий к срабатыванию элемеита 1/ и переводящий триггер 14 в состояние, характеризующее исправность устройства, значение ДФ„ поступает в регистр 9 и далее привод отрабатывает накопившееся за время сбоя небольщое рассогласование. Если после прекращения сбоя рассогласование по положению не превыщает Лф , то по сигналу с блока 11 вычитания устройство аналогично описанному выходит из режима работы цри сбое. Таким образом, в процессе сбоя код регистра 9 с достаточно высокой точностью отражает фактическое рассогласование по положению, имеющее место в
течение сбоя.
Если это значение оказывается больщим заданной величины Атк , при которой дальнейщая работа невозможна (при длительном сбое или отказе элементов), то это
выявляет блок 28 фиксации отказа, так как сигнал «1 с выхода блока 29 вычитания проходит на выход элемента И 31.
Пусть сбой аналогичен описанному в первом случае, но происходит он в режиме
отработки больщого рассогласования. Устройство работает аналогично описанному, за исключением того, что в этом режиме сигнал «Отказ не выдается, так как триггер 30 не переводится в состояние «1. В
этом режиме работы в соответствии с выражением (11) устройство выявляет и защищает привод от сбоя, характеризующегося формированием Аф . Аф-| .
В режиме отработки больщого рассогласования происходит сбой аналоговой части устройства, например, из-за преобразователя 4 код-напрял ение, элемента 3, привода 1 или превыщения момента на валу двигателя, когда скорость отработки рассогласования недопустимо изменяется. В этом случае хотя бы на одном из выходов блока 24 формируется сигнал «1, в соответствии с неравенством (5) сбой цифровой части устройства не фиксируется, элемент 16
выдает сигнал «1, по которому триггер 14 переходит в состояние, когда на его втором выходе формируется сигнал «1 и срабатывает индикатор 19, индицирующий сбой аналоговой части устройства. При этом гекущее рассогласование Дф ,. поступает через элемент ЗИ-ИЛИ 10 в регистр 9, код которого отражает фактическую величину рассогласования. Прекращение сбоя выявляется блоком 24, по сигналам которого
триггер 14 переходит в соответствующее состояние.
Если сбой аналоговой части устройства происходит в режиме слежения, устройство работает аналогично третьему случаю, если
величина ощибки в поддержании скорости велика и выявляется блоком 24.
Когда эта величина невелика, но достаочна для того, чтобы Дф, Дфлгп (например, уход параметров привода, незначительное превыщение момента нагрузки), в этом
случае по сигналу делителя 23 частоты срабатывает элемент 17, далее устройство работает аналогично третьему случаю. В этом режиме блок 28 но величине кода регистра 9 может выявить отказ устройства. Устройство эффективно защищает привод от сбоев, позволяет с высокой достоверностью выявлять неисправность устройства, .определяя отказавшую аппаратуру. Устройство определяет во время сбоя величину рассогласования по положению и выход этого параметра за точку отказа. Все это дает возможность значительно повысить эффективность использования аппаратуры, работающей в дуплексном режиме, а также отказаться в ряде случаев от применения дорогостоящей дублирующей аппаратуры для целей контроля исправности работы аппаратуры.
Формула изобретения
Устройство для функционального контроля цифрового привода, содержащее преобразователь угол-код, кинематически связанный с приводом, последовательно соединенные элемент И, преобразователь код- напряжение и суммирующий элемент, выход которого подключен к входу привода, цифровой вычислительный блок, первый выход которого соединен с первым входом элемента И, второй вход которого подключен к первому входу цифрового вычислительпого блока и одному выходу блока фиксации сбоя, другой выход которого соединен с вторым входом цифрового вычислительного блока, подключенного третьим входом к первому выходу блока формирования ошибки, четвертым входом - к шине тактовых импульсов, пятым входом - к выходу
преооразователя угол-код, второй выход цифрового вычислительного блока подключен к нервому входу блока фиксации сбоя, отличающееся тем, что, с целью повынюния
достоверности контроля, в зстройство введены блок сравнения, блок контроля скорости, блок фиксации отказа, делитель часготы, выход которого подключен к третьему входу элемента И, второму входу блока
фиксации сбоя и первому входу блока контроля скорости, вход делителя частоты подключен к шине тактовых импульсов, первому входу блока фиксации отказа и первому входу блока сравнения, второй вход которого подключен к третьему выходу цифрового вычислительного блока, третий - к второму выходу блока формирования ошибки, выходы блока сравнения соединены соответственно с вторым и третьим входами
блока контроля скорости, третьим и четвертым входами блока фиксации сбоя, пятый и шестой входы которого подключены к соответствующим выходам блока контроля скорости, второй вход блока фиксации отказа подключен к четвертому выходу цифрового вычислительного блока, третий вход - к второму выходу цифрового вычислительного блока, четвертый вход блока контроля скорости соединен с выходом элемента И,
вход блока формирования ошибки - с вторым входом элелгента И.
Источники информации, нринятые во внимание при экспертизе 1. Авторское свидетельство СССР № 315160, кл. G 05В 21/02, 1972.
2.Авторское свидетельство СССР 453672, кл. G 05В 23/02, 1972.
3.Авторское свидетельство СССР i 489074, кл. G 05В 23/02, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1977 |
|
SU739468A1 |
| Устройство для функционального контроля электропривода | 1987 |
|
SU1481717A1 |
| Устройство для управления приводом | 1973 |
|
SU489074A1 |
| Устройство для поверки цифровых измерителей девиации фазы | 1990 |
|
SU1781651A1 |
| Регулятор | 1990 |
|
SU1803906A1 |
| Устройство для контроля времени выполнения программы | 1983 |
|
SU1140124A1 |
| Система для проведения испытаний турбины | 1989 |
|
SU1636706A1 |
| Преобразователь унитарного кода в сдвиг фазы импульсного сигнала | 1984 |
|
SU1229962A1 |
| Устройство для цикловой синхронизации | 1981 |
|
SU1107317A1 |
| Устройство программного управления антенной | 1988 |
|
SU1594487A1 |