Способ контроля напряженного состояния изделий осуществляют следующим образом.
Под углом к поверхности контролируемого изделия возбуждают упругие колебания без приложения нагрузки. Принимают заданный эхо-импульс и находят точку, где амплитуда принятого эхо-сигнала максимальная. Устанавли- вают в этой точке приемник упругих колебаний и при дальнейшем контроле не перемещают его. При Воздействии на контролируемое изделие нагрузки в нем возникают деформации. В результате деформации контролируемого изделия в процессе нагрузки или разгрузки происходит взаимное перемещение ультразвуковых преобразователей один относительно другого и точка приема - смещается относительно точки с максимальной амплитудой. В реальных условиях изделие подвергается малым упру- гопластическим деформациям и поэтому смещение находится в зоне приема вы- бранного эхо-импульса.
Таким образом, в рассматриваемом случае изменение амплитуды принятого сигнала вызывается не только измене- нием напряженного состояния, но и относительным смещением максимума прошедшего сигнала. Затем при воздействии нагрузки в контролируемом изделии возбуждают упругие колебания, принимают заданный эхо-импульс и измеряют его амплитуду. Предварительно определяют зависимость амплитуды принятого эхо-сигнала от смещения точки приема от точки с максимальной амплитудой (фиг. 1). Так как измерение амплитуды проводится при изменяющемся взаимном расположении преобразователей, то необходимо определить амплитуду принятого сигнала в точке с максимальной амплитудой. Для этого измеряется величина взаимного перемещения преобразователей или (что равносильно смещение точки приема относительно точки с максимальной амплитудой одним
0
5
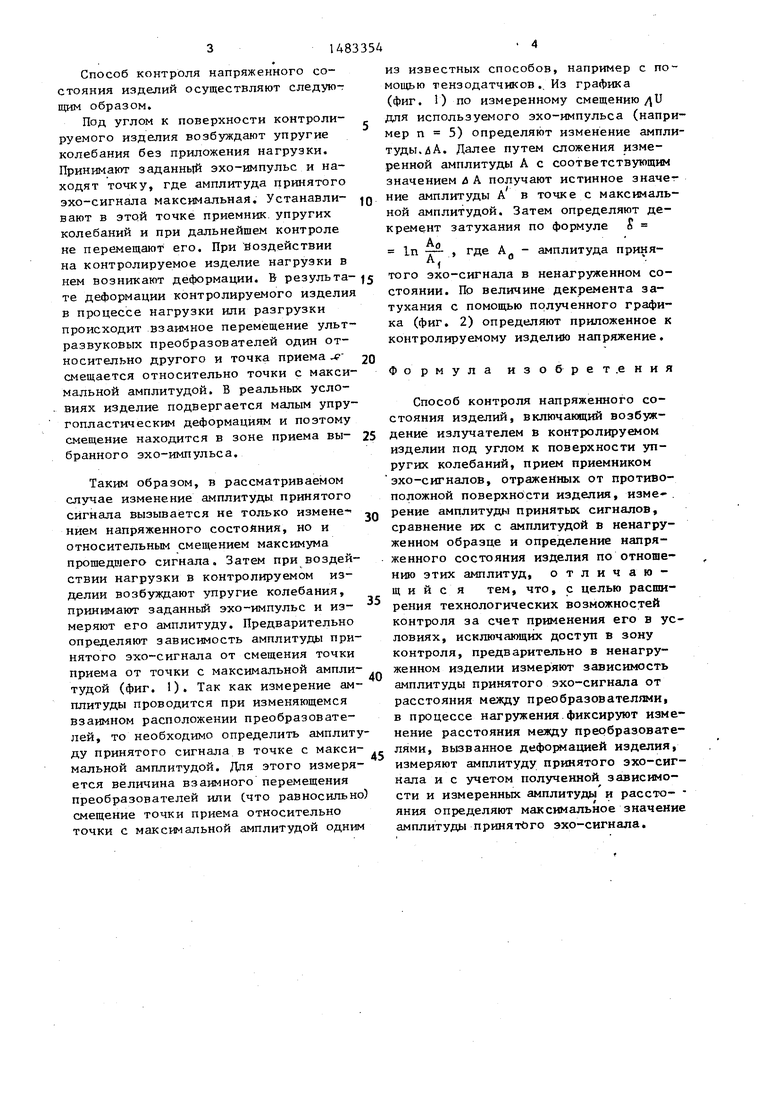
из известных способов, например с помощью тензодатчиков. Из графика (фиг. 1) по измеренному смещению для используемого эхо-импульса (например п 5) определяют изменение амплитуды. 4А. Далее путем сложения измеренной амплитуды А с соответствующим значением л А получают истинное значение амплитуды А в точке с максимальной амплитудой. Затем определяют декремент затухания по формуле &
1 АО
In -г- , где Afl - амплитуда приняА1
того эхо-сигнала в ненагруженном состоянии. По величине декремента затухания с помощью полученного графика (фиг. 2) определяют приложенное к контролируемому изделию напряжение.
Формула изобрет.ения
Способ контроля напряженного состояния изделий, включающий возбуждение излучателем в контролируемом изделии под углом к поверхности упругих колебаний, прием приемником эхо-сигналов, отраженных от противоположной поверхности изделия, измерение амплитуды принятых сигналов, сравнение их с амплитудой в ненагруженном образце и определение напряженного состояния изделия по отношению этих амплитуд, отличающийся тем, что, с целью расширения технологических возможностей контроля за счет применения его в условиях, исключающих доступ в зону контроля, предварительно в ненагруженном изделии измеряют зависимость амплитуды принятого эхо-сигнала от расстояния между преобразователями, в процессе нагружения фиксируют изменение расстояния между преобразователями, вызванное деформацией изделия, измеряют амплитуду принятого эхо-сигнала и с учетом полученной зависимости и измеренных амплитуды и рассто- яния определяют максимальное значение амплитуды принятого эхо-сигнала.
2 3 4 5 ff 7 8 UtMM Фиг.1
n 5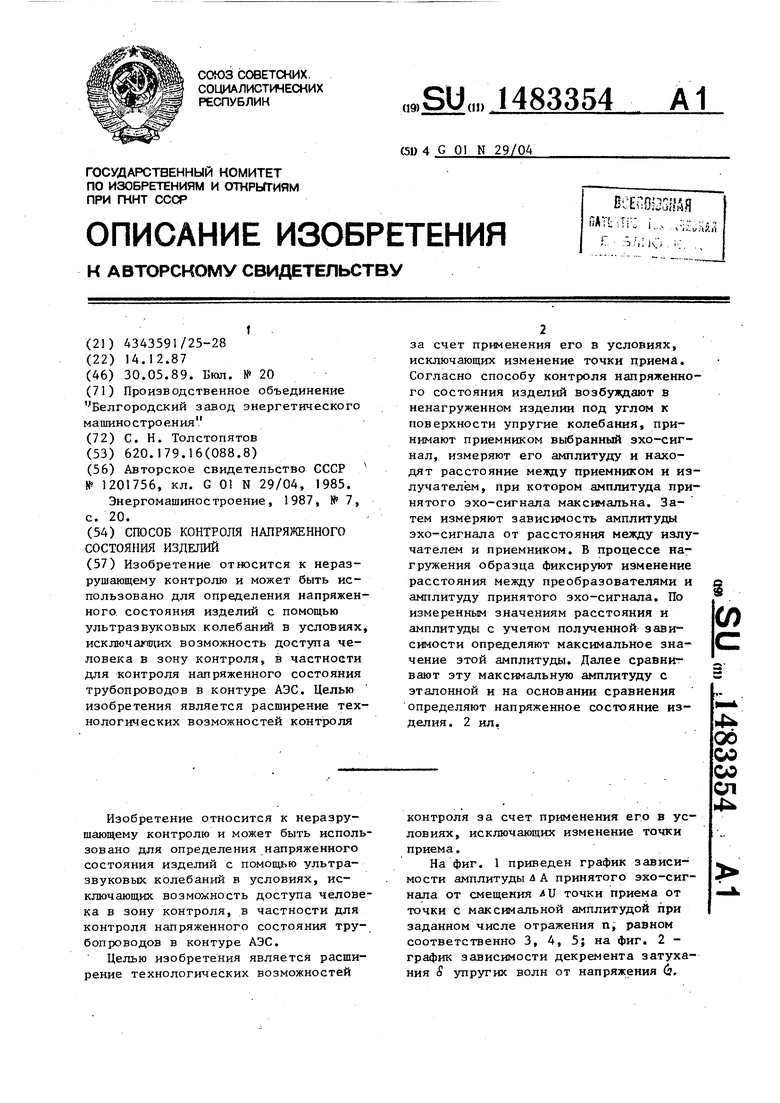

Изобретение относится к неразрушающему контролю и может быть использовано для определения напряженного состояния изделий с помощью ультразвуковых колебаний в условиях, исключающих возможность доступа человека в зону контроля, в частности для контроля напряженного состояния трубопроводов в контуре АЭС. Целью изобретения является расширение технологических возможностей контроля за счет применения его в условиях, исключающих изменение точки приема. Согласно способу контроля напряженного состояния изделий возбуждают в ненагруженном изделии под углом к поверхности упругие колебания, принимают приемником выбранный эхо-сигнал, измеряют его амплитуду и находят расстояние между приемником и излучателем, при котором амплитуда принятого эхо- сигнала максимальна. Затем измеряют зависимость амплитуды эхо-сигнала от расстояния между излучателем и приемником. В процессе нагружения образца фиксируют изменение расстояния между преобразователями и амплитуду принятого эхо-сигнала. По измеренным значениям расстояния и амплитуды с учетом полученной зависимости определяют максимальное значение этой амплитуды. Далее сравнивают эту максимальную амплитуду с эталонной и на основании сравнения определяют напряженное состояние изделия. 2 ил.
w
0.5
0,3 0,1 0,1
0
36 9 12 15 18 21 2ff 27 30 КГ Фиг.
| Устройство для неразрушающего контроля напряженного состояния пролетных строений и опор мостов | 1984 |
|
SU1201756A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Энергомашиностроение, 1987, № 7, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
