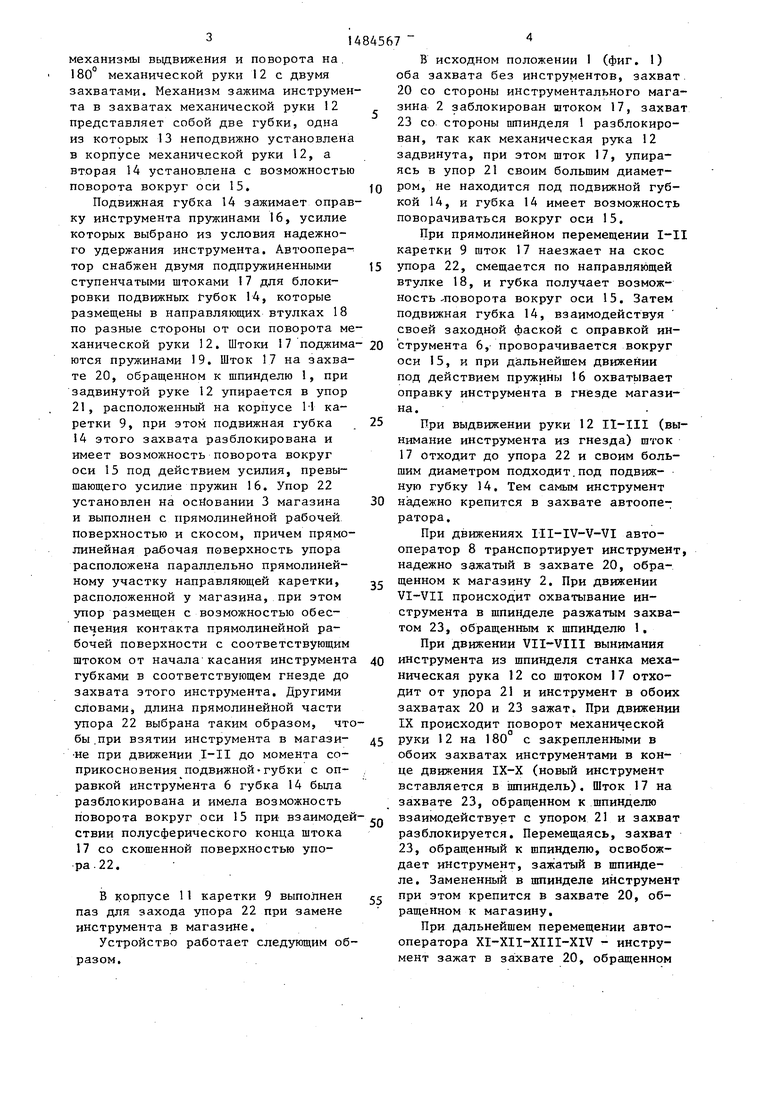
механизмы выдвижения и поворота на 180° механической руки 12 с двумя захватами. Механизм зажима инструмента в захватах механической руки 12 представляет собой две губки, одна из которых 13 неподвижно установлена в корпусе механической руки 12, а вторая 14 установлена с возможностью поворота вокруг оси 15.
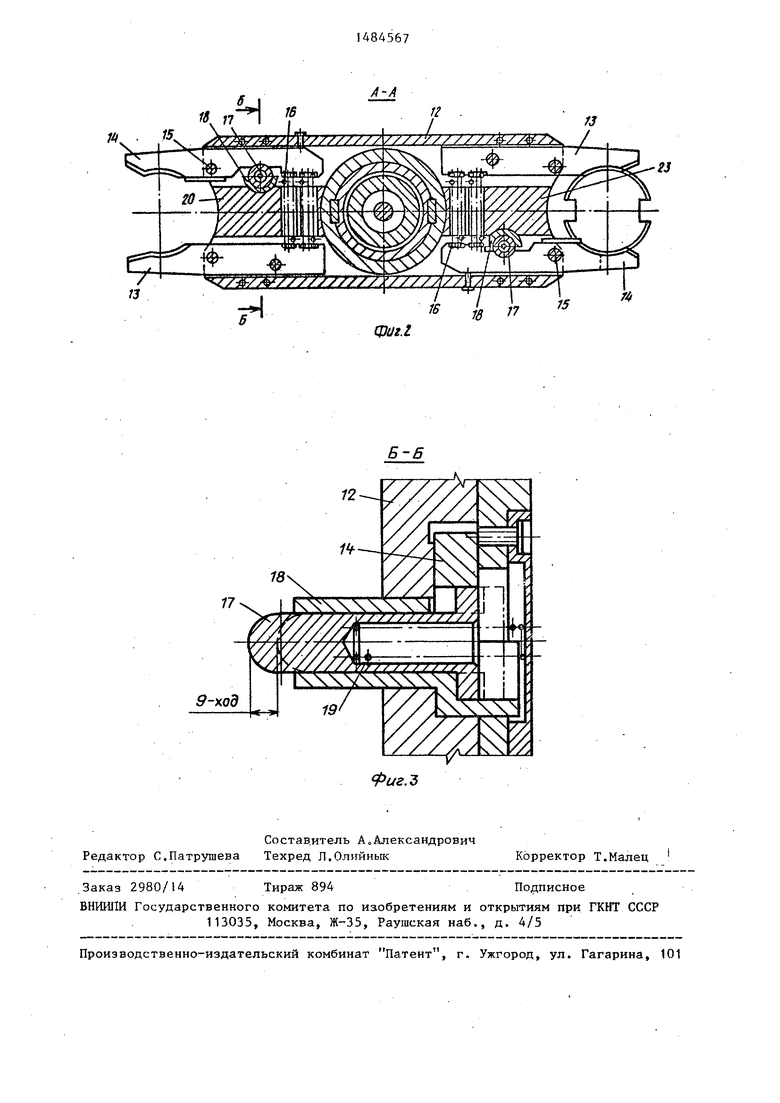
Подвижная губка 14 зажимает оправку инструмента пружинами 16, усилие которых выбрано из условия надежного удержания инструмента. Автооператор снабжен двумя подпружиненными ступенчатыми штоками 17 для блокировки подвижных губок 14, которые размещены в направляющих втулках 18 по разные стороны от оси поворота механической руки 12. Штоки 17 поджимаются пружинами 19. Шток 17 на захвате 20, обращенном к шпинделю 1, при задвинутой руке 12 упирается в упор 21, расположенный на корпусе Н каретки 9, при этом подвижная губка 14 этого захвата разблокирована и имеет возможность поворота вокруг оси 15 под действием усилия, превышающего усилие пружин 16. Упор 22 установлен на основании 3 магазина и выполнен с прямолинейной рабочей поверхностью и скосом, причем прямолинейная рабочая поверхность упора расположена параллельно прямолинейному участку направляющей каретки, расположенной у магазина, при этом упор размещен с возможностью обеспечения контакта прямолинейной рабочей поверхности с соответствующим штоком от начала касания инструмента губками в соответствующем гнезде до захвата этого инструмента. Другими словами, длина прямолинейной части упора 22 выбрана таким образом, чтобы при взятии инструмента в магазине при движении I-II до момента соприкосновения подвижной-губки с оправкой инструмента 6 губка 14 была разблокирована и имела возможность поворота вокруг оси 15 при взаимодействии полусферического конца штока 17 со скошенной поверхностью упора.22.
В корпусе 11 каретки 9 выполнен паз для захода упора 22 при замене инструмента в магазине.
Устройство работает следующим образом.
В исходном положении 1 (фиг. 1) оба захвата без инструментов, захват 20 со стороны инструментального магазина 2 заблокирован штоком 17, захват 23 со стороны шпинделя 1 разблокирован, так как механическая рука 12 задвинута, при этом шток 17, упираясь в упор 21 своим большим диаметром, не находится под подвижной губкой 14, и губка 14 имеет возможность поворачиваться вокруг оси 15.
При прямолинейном перемещении I-II каретки 9 шток 17 наезжает на скос
упора 22, смещается по направляющей втулке 18, и губка получает возможность „поворота вокруг оси 15. Затем подвижная губка 14, взаимодействуя своей заходной фаской с оправкой ин0 струмента 6, проворачивается вокруг оси 15, и при дальнейшем движении под действием пружины 16 охватывает оправку инструмента в гнезде магазина.
5 При выдвижении руки 12 II-III (вынимание инструмента из гнезда) шток 17 отходит до упора 22 и своим большим диаметром подходит.под подвижную губку 14, Тем самым инструмент
0 надежно крепится в захвате автооператора.
При движениях III-IV-V-VI автооператор 8 транспортирует инструмент, надежно зажатый в захвате 20, обра5 щенном к магазину 2. При движении VI-VII происходит схватывание инструмента в шпинделе разжатым захватом 23, обращенным к шпинделю 1. При движении VII-VIII вынимания
0 инструмента из шпинделя станка механическая рука 12 со штоком 17 отходит от упора 21 и инструмент в обоих захватах 20 и 23 зажат. При движении IX происходит поворот механической
5 руки 12 на 180 с закрепленными в обоих захватах инструментами в конце движения IX-X (новый инструмент вставляется в шпиндель). Шток 17 на захвате 23, обращенном к шпинделю
0 взаимодействует с упором 21 и захват разблокируется. Перемещаясь, захват 23, обращенный к шпинделю, освобождает инструмент, зажатый в шпинделе. Замененный в шпинделе инструмент
5 при этом крепится в захвате 20, обращенном к магазину.
При дальнейшем перемещении автооператора XI-XII-XIII-XIV - инструмент зажат в захвате 20, обращенном
Фиг.1
,7Т iTniГ
I
А-Л
13
L
1В
18
15
Я
Фиг.1

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ СТАНОК С УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА | 1994 |
|
RU2108218C1 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматической смены инструмента | 1988 |
|
SU1701474A1 |
| Металлорежущий станок с устройством для автоматической смены инструмента | 1976 |
|
SU657953A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |
Изобретение относится к станкостроению. Целью изобретения является повышение надежности. Устройство автоматической смены инструмента станка со шпинделем содержит инструментальный магазин с неподвижным основанием и гнездами под инструмент, имеющий захватную часть, а также автооператор. Последний содержит каретку, установленную с возможностью перемещения от шпинделя к магазину и обратно по прямолинейным участкам направляющей, расположенным соответственно у магазина и шпинделя. Каретка содержит корпус с установленной на нем с возможностью выдвижения и поворота на 180° механической рукой с подвижными губками и подпружиненными штоками для их блокировки. Упор для взаимодействия с соответствующим штоком размещен на корпусе со стороны захвата, обращенного к шпинделю, а упор захвата размещен на неподвижном основании магазина. Упор захвата выполнен с прямолинейной рабочей поверхностью и скосом, причем прямолинейная рабочая поверхность упора расположена параллельно прямолинейному участку направляющей каретки, расположенному у магазина. При этом упор размещен с возможностью обеспечения контакта прямолинейной рабочей поверхности с соответствующим штоком от начала касания инструмента губками в соответствующем гнезде до захвата этого инструмента. 3 ил.
12
17
| Ручной механизм для движения лодки | 1925 |
|
SU1600A1 |
