Изобретение относится к промышленному транспорту, а именно к промежуточному приводу конвейера.
Цель изобретения - повьпиение надежности работы и расширение эксплуатационных возможностей путем обеспечения переналадки для работы с конвейерами различных типов.
На фиг. 1 схематически изображен привод, общий вид; на фиг, 2 - толкатель.
Промежуточный привод конвейера включает концевые звездочки 1 и охватывающую их тяговую бесконечно замкнутую цепь 2 с шарнирно закрепленными на ней толкателями 3 для взаимодействия с выступами 4 на грузонесущем полотне 5 конвейера.
Каждьм толкатель 3 выполнен в виде двух стоек 6, жестко прикрепленных к звеньям тяговой цепи 2 перпендикулярно к ее продольной оси, планки 7 с ограничителями 8 ее поворота, расположенной на прямолинейных участках параллельно тяговой цепи 2. и двух наклоненных друг к другу поводков 9, шарнирно прикрепленных одними концами к стойкам 6, а другими концами - к планкам 7. Рабочая часть каждого толкателя 3 выполнена в виде двух параллельных пальцев 10, жестко соединенных с планкой 7. Стойки 6 и поводки 9 выполнены с регулируемой длиной посредством гаек 1 1 и 12.
Жесткость толкателя 3 по нижнему основанию обеспечивается натяжением тяговой цепи 2, подпертой опорной поверхностью 13 и фиксацией верхне основания - планки 7 нижней поверхностью 14 наложенного на нее сверху грузонесущего полотна 5. Пока сохраняется параллельность нижнего и верхнего оснований толкателя 3, его жесткость не может быть нарушена боковой нагрузкой от выступа 4 грузонесущего полотна 5.
Равенство шагов установки толкателей 3 - Т и выступов 4 - Т g (Т-г Tg) позволяет одновременно контактировать нескольким таким сопряжениям и передавать соответственно кратно увеличенные тяговые нагрузки от промежуточного привода к грузонесу- щему полотну пластинчатого конвейера.
Основное внимание в работе промежуточного привода Уделяется безударному выведению из силового взаимодействия толкателя 3 с выступом 4. Промежуточный привод конвейера работает следуюи м образом.
Тяговая цепь 2 при набегании на концевую звездочку 1 изгибается и наклоняет передний поводок 9 вперед по ходу движения тяговой цепи 2,
Q уводя за собой поводок 9, который начинает вытягивать переднюю часть планки 7 вместе с пальцем 10 из силового контакта с выступом.4 грузонесущего полотна 5. При этом жесткость
5 шарнирной равнобедренной трапеции нарушается и вал 10 толкателя 3 начинает опускаться к тяговой цепи 2, т.е. силовой контакт толкателя 3 с выступом 4 грузонесущего полотна 5
0 исчезает задолго до того, когда начинает увеличиваться шаг между смежными толкателями 3 - устраняется основная причина возникновения ударных динамических нагрузок между тол5 кателем 3 и выступом 4 грузонесущего полотна 5.
Привод чутко реагирует на степень силового взаимодействия сопрягаемых узлов конвейера - днища грузонесуще0 го полотна 5 и верхней поверхности толкателя 3, образуемой верхними (опорными) линиями двух поперечных пальцев 10, увеличивая жесткость шарнирной равнобедренной трапеции с увеличением веса грузонесущего полотна 5 и транспортируемого груза.
На фиг. 2 шарнирная система толкателя находится в рабочем состоянии. При этом на нее воздействуют вертикальная нагрузка Q массы самого грузонесущего полотна 5 и транспортируемого груза, тяговое усилие Р, а также реактивная нагрузка R сопротивления движению грузонесущего полотна 5. Результирующая сумма нагрузок Р и R равна
S Р cos o( + R - 2Р -cos
R -coso(.
0
Для сохранения устойчивости щарнирной системы толкателя промежуточного привода достаточно приложения в точке С минимальной нагрузки веса 5 грузонесущего полотна
Q ( -t- R - 2PR X
л
X COS О) -COS /i .
5
0
5
При набегании поводка 9 на концевую звездочку 1 происходят смещение его верхнего конца А в новое положение А и вывод его из силового взаимодействия толкателя 3 с выступом 4. При этом шарнир В перемещается в положение В, стремясь выпрямить в одну линию поводок 9 и планку 7. Вьтрямленная система линий ABC вьшодит из силового взаимодействия толкатель 3 в точке С с днищем грузонесущего полотна 5,
Ограничитель 8 не позволяет толкателю 3 на холостой ветви принимать форму треугольника, из которого восстановить первоначальную форму можно только приложив значительные силовые нагрузки.
Формула изобретения
Промежуточный привод конвейера, включающий кондевые звездочки и охватывающую их тяговую бесконечно замкнутую цепь с закрепленными на
ней толкателями, имеющими рабочие части для взаимодействия с выступами на грузонесущем полотне конвейера, отличающийся тем, что, с целью повышения надежности работы и расширения эксплуатационных возможностей путем обеспечения переналадки для работы с конвейерами различных типов, аждый толкатель выполнен в виде двух стоек, жестко прикрепленных к звеньям тяговой цепи перпендикулярно к ее продольной оси, планки с ограничителями ее поворота и двух наклоненных друг к другу поводков, шарнирно прикрепленных одними концами к стойкам, а другими концами - к планкам, при этом рабочая часть каждого толкателя вьтолнена в виде двух параллельных жестко соединенных с ппанкой пальцев для взаимодействия с поверхностью грузонесущего полотна, а стойки и поводки выполнены с возможностью регулирования их длины.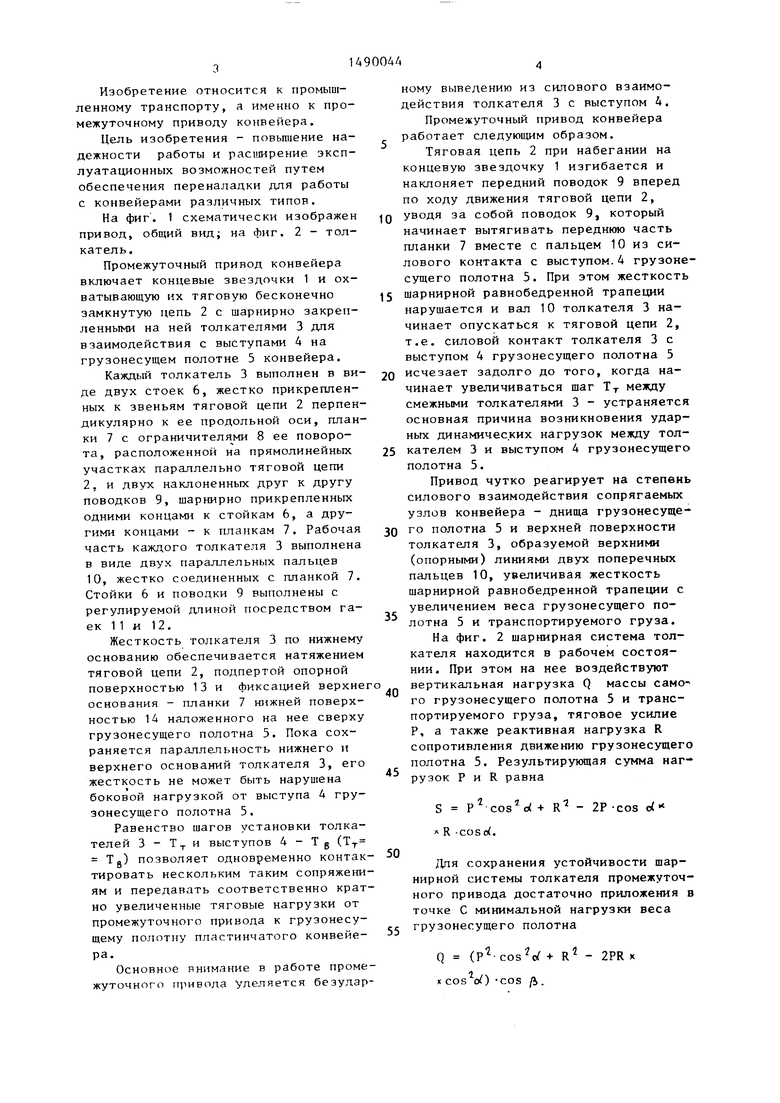
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 1964 |
|
SU162772A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Тележечный конвейер | 1986 |
|
SU1368233A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Тягово-несущий орган пластинчатого конвейера | 1978 |
|
SU779194A1 |
| УСТАНОВКА ДЛЯ ГРОХОЧЕНИЯ ПЕСКОВ | 1991 |
|
RU2011433C1 |
| Пластинчатый конвейер | 1991 |
|
SU1836274A3 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ГРАВИТАЦИОННЫ?СТЕЛЛАЖЕЙ^^..v-.-^jIJ П г ЬФ1Д ШШпЕГш! | 1970 |
|
SU435995A1 |
| Транспортирующее устройство | 1981 |
|
SU967884A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1244046A1 |
Изобретение относится к пром. транспорту и позволяет повысить надежность работы и расширить эксплуатационные возможности путем обеспечения переналадки для работы с конвейерами различных типов. Для этого каждый толкатель (Т) 3 выполнен в виде двух стоек 6, жестко присоединенных к звеньям тяговой цепи (Ц) 2, планки (П) 7 с ограничителями 8, расположенной параллельно Ц 2, и двух наклонных поводков (НП) 9, шарнирно прикрепленных концами к стойкам 6 и П 7. Рабочая часть каждого Т выполнена в виде двух параллельных пальцев 10, жестко соединенных с П 7 с возможностью взаимодействия с выступами 4 и днищем грузонесущего полотна 5 конвейера. Стойки 6 и НВ 9 выполнены с регулируемой длиной. При набегании Ц 2 на концевую звездочку НП 9 наклоняется вперед по ходу движения Ц 2, последняя вводит за собой НП 9, который начинает вытягивать переднюю часть П 7 с пальцем 10 из контакта с выступом 4 грузонесущего полотна 5. Благодаря этому силовой контакт Т 3 с выступом 4 исчезает задолго до того, когда начинает увеличиваться шаг между Т 3, что устраняет динамические нагрузки. 2 ил.
Ю
РСОЛ(
| Бульдозер | 1981 |
|
SU1004545A1 |
| Горный компас | 0 |
|
SU81A1 |
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРОВ с ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 0 |
|
SU165404A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
