(5) КОНВЕЙЕР ДЛЯ МЕЖОПЕРАЦИОННОГО ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО | 1965 |
|
SU176824A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для перегрузки изделий с подвесного грузонесущего конвейера | 1975 |
|
SU655610A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Шаговый конвейер | 1984 |
|
SU1222599A1 |
| Устройство для дозированной подачи заготовок | 1985 |
|
SU1284909A1 |
| Поворотная подвеска грузонесущегопОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814818A1 |
| Устройство для навешивания и съема крупногабаритных изделий с грузонесущих подвесок подвесного конвейера | 1980 |
|
SU956385A1 |
| Устройство для поштучной выдачи длинномерных цилиндрических изделий из пачки | 1989 |
|
SU1787910A1 |
1 -V
Изобретение относится к конвейерному транспорту, в частности к конвейерам непрерывного действия, и чюжет быть использовано для межоперационного перемещения изделий, имеющих опорную плоскость, на поверхности которой имеются штыри, например для межоперационного перемещения при сборке борон.
Известен конвейер для межоперационного перемещения изделий, включающий бесконечный тяговый орган с закрепленными на нем пластинами, на которых размещены несущие опоры для изделий, закрепленные на раме, копир ные направиляющие и механизмы кантования изделий .
Недостатком данного конвейера является непригодность его для сборки изделий, имеющих штыри на опорной плоскости, отсутствие возможности съема изделий с конвейера и навески их на подвески.
Наиболее близким по технической сущности и достигаемому результату является конвейер для межоперационного перемещения изделий, включающий раму, бесконечный тяговый орган с грузоиесущим элементом, съемник, закрепленный на раме в месте выгрузки, и механизмнавески изделий на подвески 2.
0 Недостатком данного конвейера является низкая его надежность за счет отсутствия крепления изделия типа бороны в момент перемещения.на грузонесущем элементе и сборке, возмож-.
t5 ность заклинивания изделий мёищу гру зонесущим элементом и съемником и исключения фиксации-при передаче борон на подвеск1 «.
Целью изобретения является повыше20 ние надежности работы конвейера при перемещении, сборке и навеске изделия типа бороны.
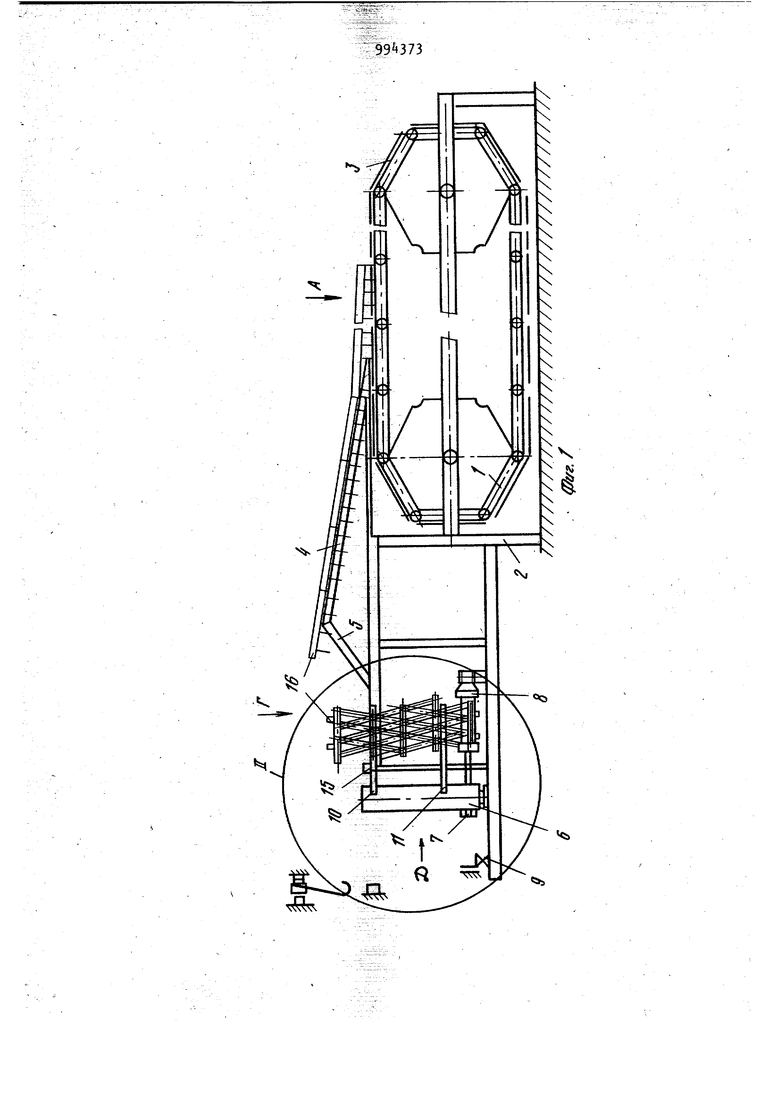
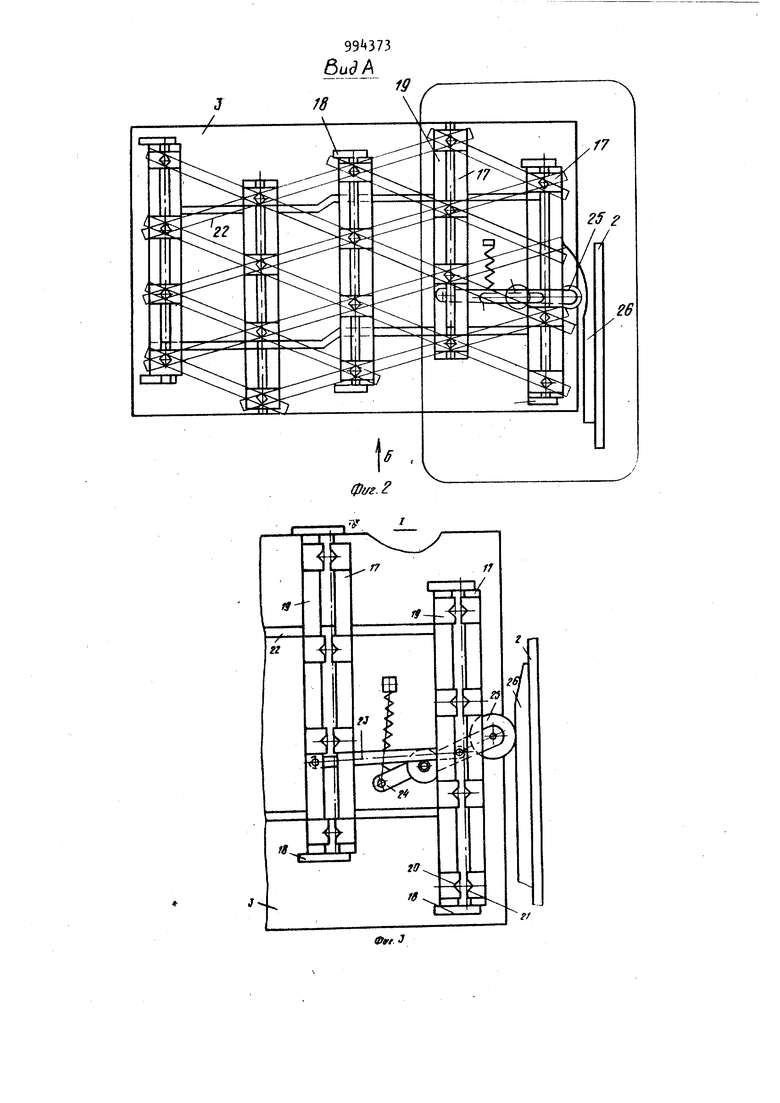
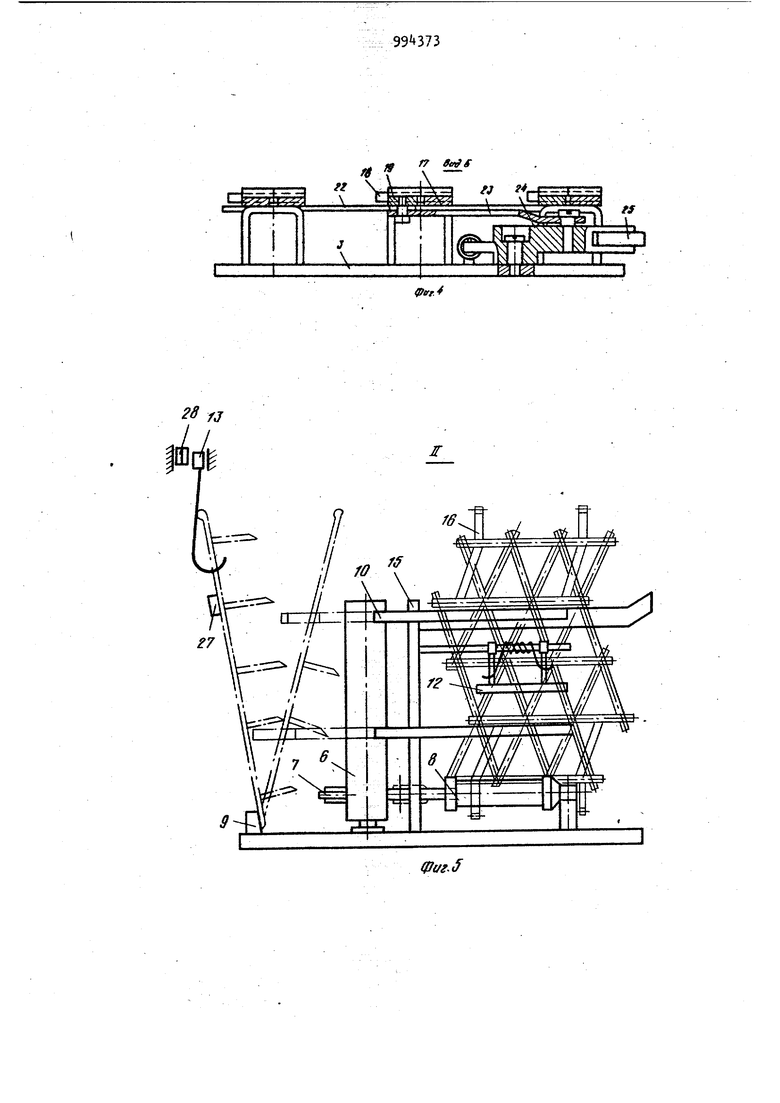
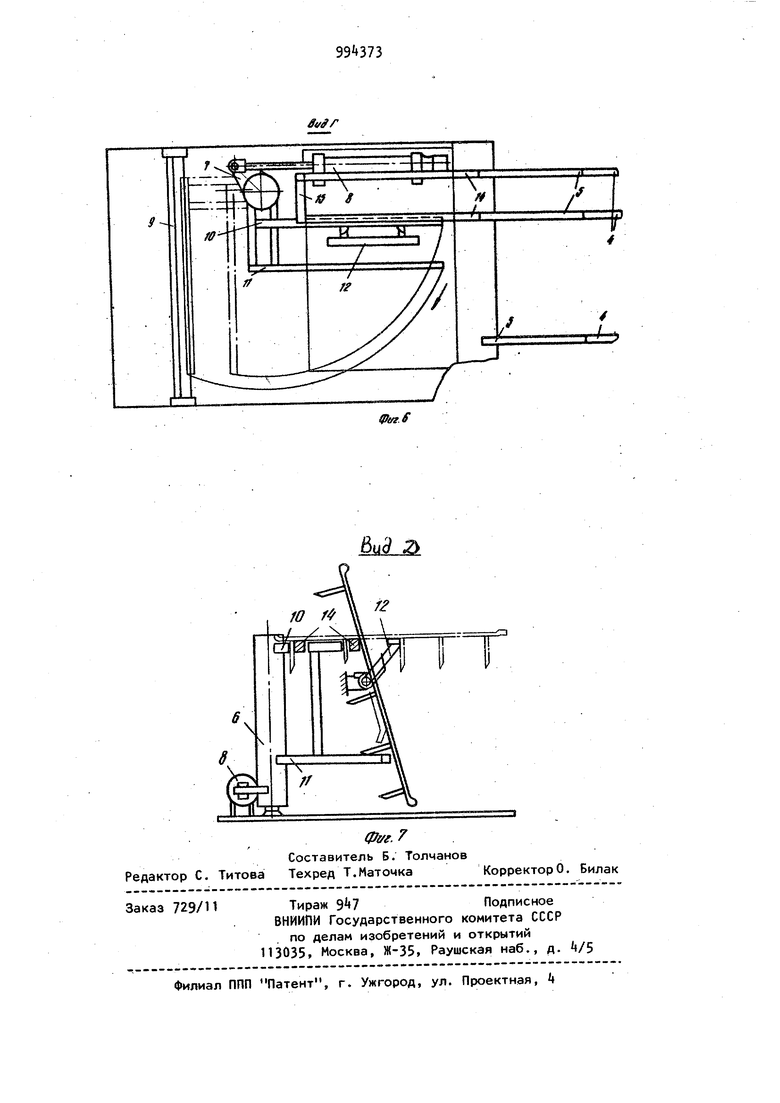
Цель достигается тем, что в конвейере для межоперационного перемеще39ния изделий, включающем раму, бесконечный тяговый орган с груэонесущим элементом, съемник, закрепленный на раме в месте выгрузки, и механизм навески изделий на подвески, грузонесущий элемент выполнен в виде кондукторных плит с направляющими и попарно установленными в них неподвижными и подвижными, имеющими механизм перемещения, планками, выполненными с обращенными навстречу друг другу пазами, при этом съемник выполнен в виде установленного на раме подъемного в направлении перемещения изделий участка и примыкающего к нему склиза, имеюще.го уклон в том же направлении и в конце горизонтальный участок, причем механизм навески изделий на подвески выполнен в виде поворотной посредством силового цилиндра колонны с двумя параллельными верхним и нижним ловителями, установ ленными на колонне в разных вертикаль ных плоскостях, и ограничителя поворота . Подвижные планки соединены между собой посредством стержней, а механизм перемещения подвижных планок выполнен в виде связанных с ними толкателя, установленного на раме в месте выгрузки копира, и шарнирно связанного с толкателем подпружиненного рычага с роликом, шарнирно установ.ленного на каждой кондукторной плите с возможностью взаимодействия его ролика с копиром. Горизонтальный участок склиза имеет упор и установлен с одной стороны относительно вертикальной плоскости, проходящей через горизонтальную ось съемника. Кроме того, механизм навески изде лий на подвески снабжен подпружиненной планкой, установленной шарнирно и параллельно ловителям, а нижний ло витель расположен выше уровня располо жения ограничителя поворота. На фиг. 1 изображен конвейер для межоперационного перемещения изделий на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел 1 на фиг. 2; на фиг. U вид Б на фиг. 2; на фиг. 5 - узел II на фиг. 1; на фиг. 6 - вид Г на фиг. на фиг. 7 - вид Д на фиг. 1. Конвейер включает бесконечный тяговый орган 1, установленный на раме 2, на котором закреплен грузонесущий элемент в виде кондукторных плит, 3 3 и съемник, содержащий подъемный в направлении перемещения изделия участок k и склиз 5. а также механизм навески борон, включающий колонну 6 noсредством поводка 7 . шарнирно связанную с закрепленным на раме 2 силовым цилиндром 8, а также установленный на раме 2 ограничитель поворота Э, выполненный в виде подпружиненного упора (пружина на чертеже не показана) с возможностью вращения относительно оси крепления. На поворотной колонне 6 закреплены верхний 1 О и . нижний 11 ловители, при этом верхний ловитель 10 снабжен подпружиненной планкой 12 параллельной ловителю, а верхний 10 и нижний 11 ловители yctaновлены на колонне 6 в разных вертикальных плоскостях. Подвески для навешивания борон другого транспортного органа обозначены позицией 13Подъемный участок съемника выполнен в виде установленных на раме 2 с подъемом в направлении движения конвейера трех направляющих, а примыкающий к ним склиз 5 представляет собой продолжение направляющих съемной части , но выполненных с уклоном в направлении движения конвейера, и заканчивающихся горизонтальным участком 1 в виде двух направляющих, установленных с одной стороны относительно вертикальной плоскости, проходящей через горизонтальную ось съемника, и снабженных упором 15Для установки на конвейер собираемых изделий 16 на кондукторной плите 3 неподвижно закреплены планки 17 с направляющими 18, в которых установлены подвижные планки 19, при этом . планки 17 и 19 выполнены с обращенными навстречу друг другу пазами 20 и 21, а планки 19 связаны между собой стержнями 22. На этой раме закреплен механизм перемещения планок 19, выполненный в виде толкателя 23, шарнирно связанного с ним подпружиненного рычага 2, установленного на плите 3 с возможностью вращения и посредством ролика-25 контактирующего с копиром 26, который закреплен на раме 2 конвейера на длине, равной длине не менее чем одного изделия, начиная от съемной части k съемника, а на остальной длине конвейера его нет. Для ограничения вращения навешивания изделий на крлочья другого конвейера в зоне навески установлен упор 27. Конвейер работает следующим образом. Пальцы собираемой бороны вставляются в гнезда, образованные пазами 20 и 21, сомкнутыми планками 17 и 19 В ходе перемещения установленных пал цев с одной рабочей позиции на другую осуществляется сборка борон. Пос ле окончания сборки изделий 16 при выходе с последней рабочей позиции ролик 25 рычага-2 входит в контакт с копиром 26 и подвижные планки 19 под действием толкателя 23 двигаются в направляющих 18, отходя от неподвижных планок 17, и гнезда размыкаются . Размыкание планок 17 и 19 проходи в направлении, перпендикулярном направлению движения конвейера, при этом в направлении движения конвейера между планками 17 и 19 образуются зазоры, величина которых больше размера пальцев, вставляемых в гнезда. После размыкания планок 17 и 19 изделие 16, пальцы которого освобождаются из разомкнутых пазов, входит в контакт с подъемным участком 4 и, находясь в крнтакте с последующим изделием 16, находящимся на последней рабочей позиции, под действием тягового органа 1 движется по подъемному участку Ц к месту примыкания склиза 5- По мере выдвижения изделия 1б над склизом 5 под действием силы тяжести изделие 16 переваливается на склиз 5 и за счет потенциальной энер гии, полученной при подъеме и действия сил собственного веса, попадает на горизонтальный участок Н, примыкающий к склизу 5, где доходит до уп ра 15, и так как направляющие на горизонтальном участке 1 смещены отно сительно центра тяжести изделия 1б в одну сторону, то изделие под действием собственного веса повернется от носительно ближней к центру тяжести направляющей, повернув при этом подпружиненную планку 12, и, как только изделие коснется нижнего ловителя 11 (гашение кинетической энергии при повороте изделия происходит за счет восприятия этой энергии пружиной под пружиненной планки 12), включается силовой цилиндр 8. При включении силового цилиндра 8 его шток, шарнирно
связанный с поводком 7 поворотной колонны 6, совершая поступательное движение, начинает поворачивать ее, при
ся навеска, с движением технологического конвейера. В этом случае после установки изделия 16 в положение для этом изделие снимается с направляющей горизонтального участка I и повисает на верхнем ловителе 10 и нижнем ловителе 11, при этом подпружиненная планка 12 находится в повернутом положении. В конце поворота колонны 6 происходит навеска изделия 16 на крючья 13 технологического конвейера. При этом осуществление навески может производиться двумя вариантами. Первый вариант предусматривает навешивание изделия 16 на крючья 13 {как минимум на два кpючka) непосредственно в конце поворота колонны 6. в этом случае необходима синхронизация движения конвейера транспортного с конвейером технологическим, или тяговый орган конвейера, на который производится навеска, должен иметь невысокую скорость движения. Процесс навески осуществляется следующим образом. Ввиду того, что нижний ловитель 11 выдвинут вперед относительно верхнего 10, в конце поворота колонны 6 изделие 16 взаимодействует с подпружиненным ограничителем поворота 9 и поворачивается за счет образования пары сил ограничителя поворота 9 и нижнего ловителя 11. Дойдя до упора 9 изделие 16 под действием ловителя 11 начинает вращаться вместе с упором 9 относительно оси его подвески до контакга с упором 27 в процессе поворота изделия 16 иJпроисходит навеска его на крючья 13, так как само изделие представляет решетчатую раму со сквозными отверстиями. После этого колонна 6 возвращается в исходное по/южение. Второй вариант навески предусматривает попадание крючьев 13 в отверстия изделия 16, когда последнее находится в повернутом положении и удерживается в нем с помощью упора 27 и силы тяжести изделия. В этом случае также осуществляется поворот изделия 16 вместе с упором 9. При этом изделие 16 остается в повернутом положении, а крючья 13, двигаясь по копиру 28 в своих направляющих, вдеваются в отверстие решетчатой рамы изделия. Второй вариант представляется более предпочтительным так как не требует синхронизаци1 движения конвейера, на котор |й производитнавески колонна 6 возвращается в исходное положение. При съеме следующего изделия с конвейера и навеске его на тяговый орган технологического конвейера весь цикл повторяется.
Использование конструкции данного Конвейера только на одном КаменецПодольском заводе сельскохозяйственных машин позволит высвободить 5 рабочих мест по сравнению с существующим на заводе техпроцессом и по заказу которого производилась разработка.
Применение данного конвейера позволит повысить надежность перемещения, сборкии навески изделий типа борон на подвески.
Формула изобретения
направлении и в конце горизонтальный участок, причем механизм навески изделий на подвеске выполнен в виде поворотной посредством силового цилиндра колонны с двумя параллельными верхним и нижним ловителями, установленными на колонне в разных вертикальных плоскостях, и ограничителя поворота. 2. Конвейер по п. 1, о т л и чающийся тем, что подвижные планки соединены между собой посредством стержней, а механизм перемещения подвижных планок выполнен в виде связанных с ними толкателя, установ5 ленного на раме в месте выгрузки копира, и шарнирно связанного с толкателем подпружиненного рычага с роликом, шарнирно установленного на каждой кондукторной плите с возможностью
0 взаимодействия его ролика с копиром. 3- Устройство по п. 1, о т л и чающееся тем, что горизонтальный участок склиза имеет упор и установлен с одной стороны относи5 тельно вертикальной плоскости, проходящей через горизонтальную ось съемника.
k. Устройство по п. 1, о т л и чающе-еся тем, что механизм
0 навески изделий на подвески снабжен подпружиненной планкой, установленной шарнирно и параллельно ловителям, а нижний ловитель расположен выше уровня расположения ограничителя поворота.
Источники информации, принятые во внимание при экспертизе
бив А
ЭЭ+ЗУЗ
,Т /
f/
fZ
t7
1
I
3
ф{/г.
