Изобретение относится к конвейерному транспорту, а именно разгрузо.ч- но-перегрузочным устройствам, позво
ляющим производить загрузку сыпучим материалом расположенных в ряд аккумулирующих бункеров.
Цель изобретения - упрощение конструкции и повышение надежности работы устройстна.
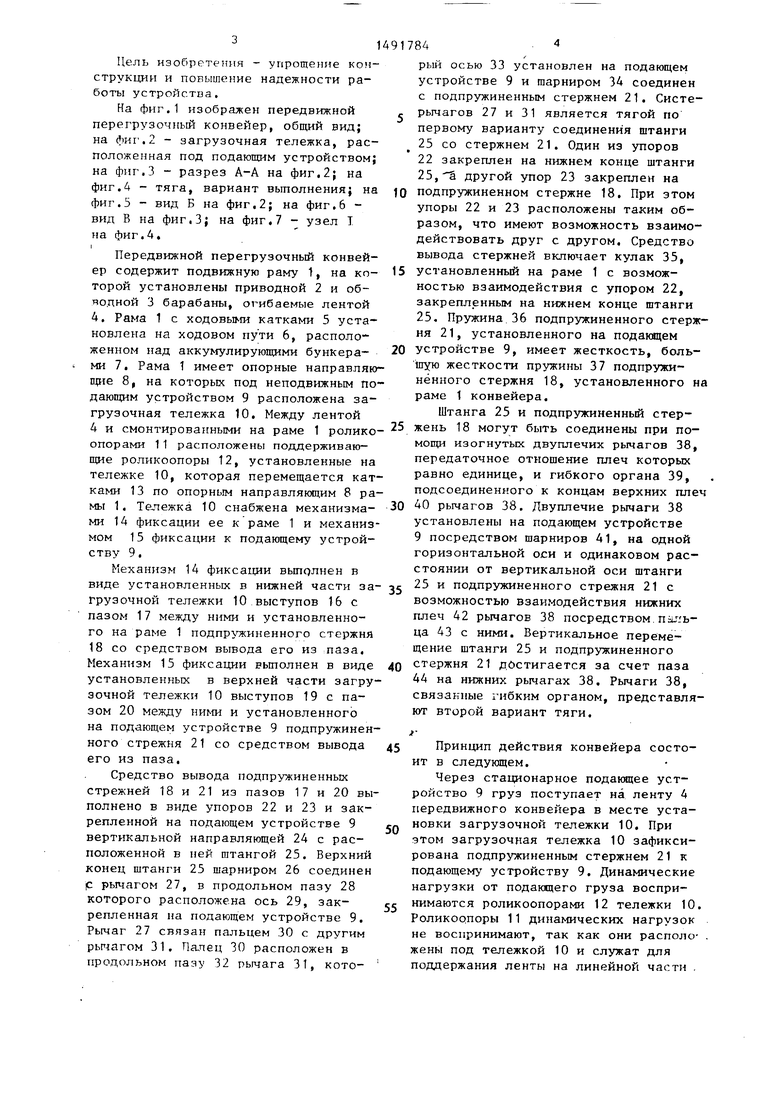
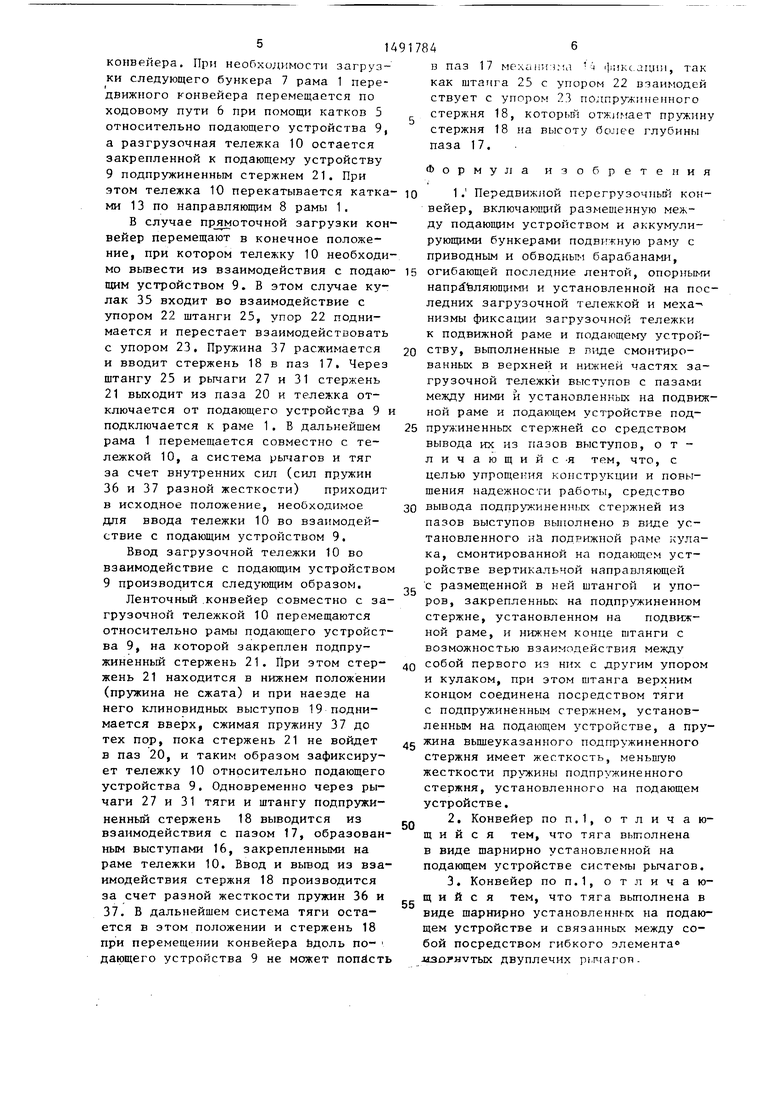
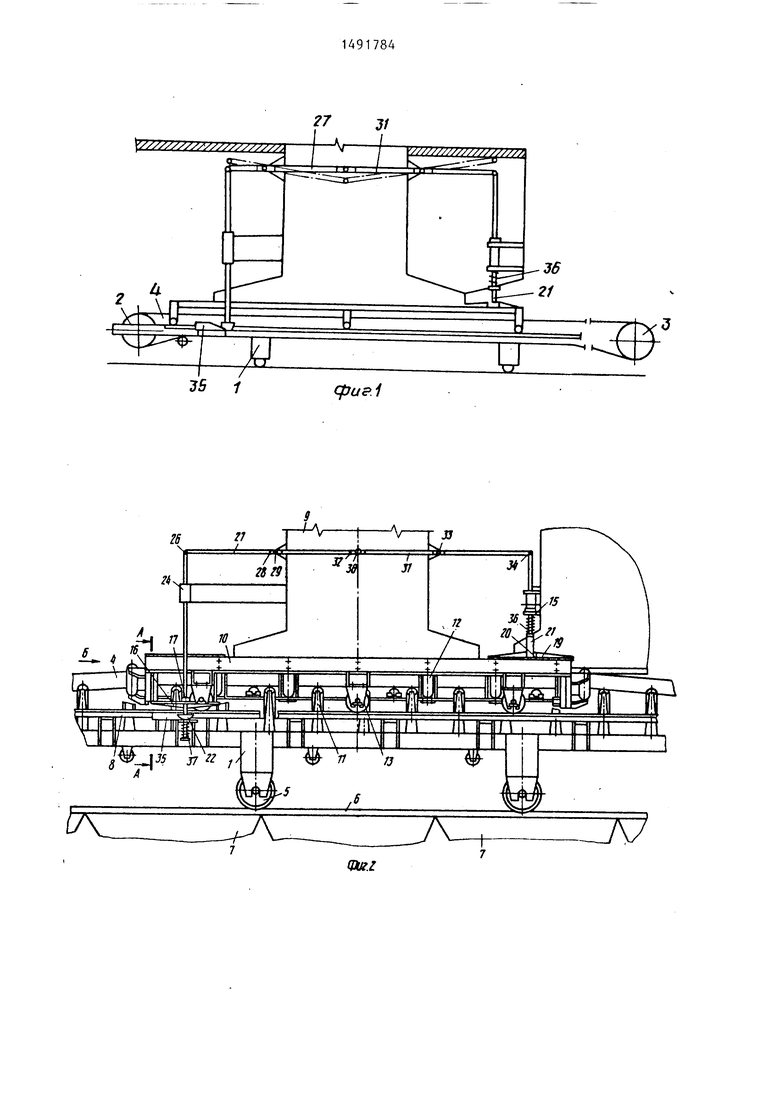
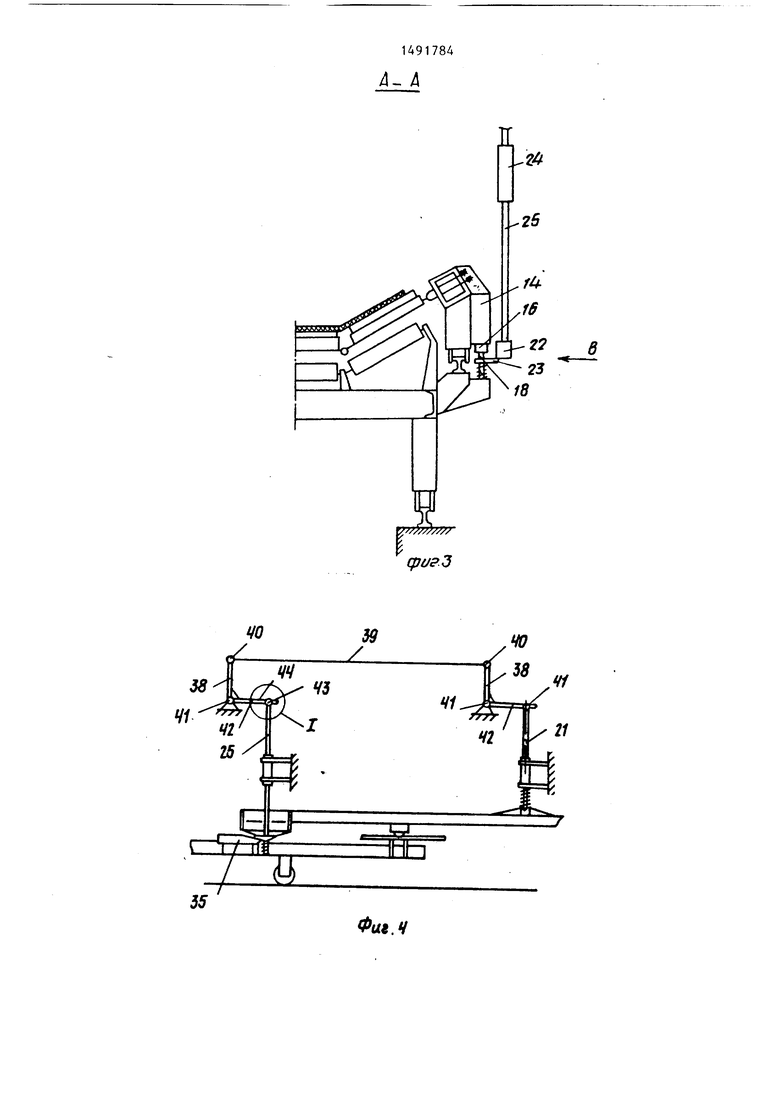
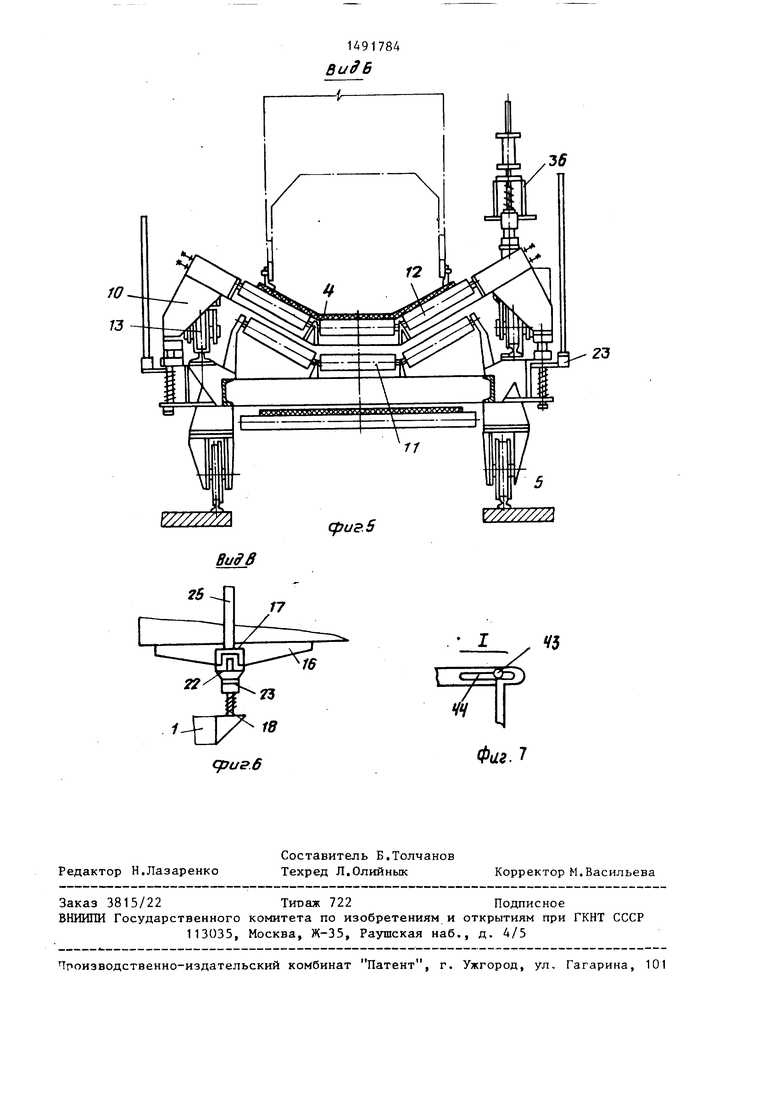
На фиг.1 изображен передвижной перегрузочный конвейер, общий вид; на фиг.2 - загрузочная тележка, расположенная под подающим устройством; на фиг.З - разрез А-А на фиг.2; на фиг.4 - тяга, вариант вьшолиения} на фиг.З - вид Б на фиг.2; на фиг.6 - вид В на фиг.З; на фиг,7 - узел I на фиг.4.
Передвижной перегрузочный конвейер содержит подвижную раму 1, на которой установлены приводной 2 и об- лодной 3 барабаны, огибаемые лентой 4. Рама 1 с ходовыми катками 5 установлена на ходовом пути 6, расположенном над aккy ryлиpyющими бункерами 7. Рама 1 имеет опорные направляющие 8, на которых под неподвижным подающим устройством 9 расположена загрузочная тележка 10. Между лентой 4 и смонтированными на раме 1 ролико- опорами 11 расположены поддерживающие роликоопоры 12, установленные на тележке 10, которая перемещается катками 13 по опорным направляющим 8 рамы 1. Тележка 10 снабжена механизмами 14 фиксации ее к раме 1 и механизмом 15 фиксации к подающему устройству 9.
Механизм 14 фиксации вьтрлнен в
рый осью 33 установлен на подающем устройстве 9 и щарниром 34 соедине с подпружиненным стержнем 21. Сист рычагов 27 и 31 является тягой по первому варианту соединения штанги 25 со стержнем 21. Один из упоров 22 закреплен на нижнем конце штанг 25, другой упор 23 закреплен на
to подпружиненном стержне 18. При это упоры 22 и 23 расположены таким об разом, что имеют возможность взаим действовать друг с другом. Средств вывода стержней включает кулак 35,
15 установленный на раме 1 с возможностью взаимодействия с упором 22, закрепл енньм на нижнем конце штанг 25. Пружина 36 подпружиненного сте ня 21, установленного на подакщем
20 устройстве 9, имеет жесткость, бол 1пую жесткости пружины 37 подпружиненного стержня 18, установленного раме 1 конвейера.
Штанга 25 и подпружиненный стер
25 жень 18 могут быть соединены при п мощи изогнутых двуплечих рычагов 3 передаточное отношение плеч которы равно единице, и гибкого органа 39 подсоединенного к концам верхних п
30 0 рычагов 38. Двуплечие рычаги 38 установлены на подающем устройстве 9 посредством шарниров 41, на одно горизонтальной оси и одинаковом ра стоянии от вертикальной оси штанги
виде установленных в нижней части за- 35 подпружиненного стрежня 21 с
40
грузочной тележки 10 выступов 16 с пазом 17 между ними и установленного на раме 1 подпрчгжиненного стержня 18 со средством вывода его из паза. Механизм 15 фиксации вьтолнен в виде установленных в верхней части загрузочной тележки 10 выступов 19 с пазом 20 между ними и установленного на подающем устройстве 9 подпружиненного стрежня 21 со средством вывода 45 его из паза.
Средство вывода подпружиненных стрежней 18 и 21 из пазов 17 и 20 выполнено в виде упоров 22 и 23 и закрепленной на подающем устройстве 9 вертикальной направляющей 24 с расположенной в ней штангой 25. Верхний конец штанги 25 щарниром 26 соединен р рычагом 27, в продольном пазу 28 которого расположена ось 29, закрепленная на подающем устройстве 9. Рычаг 27 связан пальцем 30 с другим рычагом 31. Палец 30 расположен в продольном пазу 32 рычага 31, кото50
55
возможностью взаимодействия нижних плеч 42 рычагов 38 посредством, паг ца 43 с ними. Вертикальное перемещение штанги 25 и подпружиненного стержня 21 достигается за счет паз 44 на нижних рычагах 38. Рычаги 38 связанные гибким органом, представ ют второй вариант тяги.
Принцип действия конвейера сост ит в следующем.
Через стационарное подающее уст ройство 9 груз поступает на ленту передвижного конвейера в месте уст новки загрузочной тележки 10. При этом загрузочная тележка 10 зафикс рована подпружиненным стержнем 21 подающем устройству 9. Динамическ нагрузки от подающего груза воспри нимаются роликоопорами 12 тележки Роликоопоры 11 динамических нагруз не воспринимают, так как они распо жены под тележкой 10 и служат для поддержания ленты на линейной част
рый осью 33 установлен на подающем устройстве 9 и щарниром 34 соединен с подпружиненным стержнем 21. Систе- рычагов 27 и 31 является тягой по первому варианту соединения штанги 25 со стержнем 21. Один из упоров 22 закреплен на нижнем конце штанги 25, другой упор 23 закреплен на
подпружиненном стержне 18. При этом упоры 22 и 23 расположены таким образом, что имеют возможность взаимодействовать друг с другом. Средство вывода стержней включает кулак 35,
установленный на раме 1 с возможностью взаимодействия с упором 22, закрепл енньм на нижнем конце штанги 25. Пружина 36 подпружиненного стержня 21, установленного на подакщем
устройстве 9, имеет жесткость, боль- 1пую жесткости пружины 37 подпружиненного стержня 18, установленного на раме 1 конвейера.
Штанга 25 и подпружиненный стержень 18 могут быть соединены при помощи изогнутых двуплечих рычагов 38, передаточное отношение плеч которых равно единице, и гибкого органа 39, подсоединенного к концам верхних плеч
0 рычагов 38. Двуплечие рычаги 38 установлены на подающем устройстве 9 посредством шарниров 41, на одной горизонтальной оси и одинаковом расстоянии от вертикальной оси штанги
подпружиненного стрежня 21 с
возможностью взаимодействия нижних плеч 42 рычагов 38 посредством, паггь- ца 43 с ними. Вертикальное перемещение штанги 25 и подпружиненного стержня 21 достигается за счет паза 44 на нижних рычагах 38. Рычаги 38, связанные гибким органом, представляют второй вариант тяги.
Принцип действия конвейера состоит в следующем.
Через стационарное подающее устройство 9 груз поступает на ленту 4 передвижного конвейера в месте установки загрузочной тележки 10. При этом загрузочная тележка 10 зафиксирована подпружиненным стержнем 21 к подающем устройству 9. Динамические нагрузки от подающего груза воспринимаются роликоопорами 12 тележки 10. Роликоопоры 11 динамических нагрузок не воспринимают, так как они располо- . жены под тележкой 10 и служат для поддержания ленты на линейной части .
конвейера. При необходимости загрузки следующего бункера 7 рама 1 передвижного конвейера перемещается по ходовому пути 6 при помощи катков 5 относительно подающего устройства 9, а разгрузочная тележка 10 остается закрепленной к подающему устройству 9 подпружиненным стержнем 21. При этом тележка 10 перекатывается катка- ми 13 по направляющим 8 рамы 1,
В случае пр ямоточной загрузки конвейер перемещают в конечное положение, при котором тележку 10 необходимо вывести из взаимодействия с подающим устройством 9. В этом случае кулак 35 входит во взаимодействие с упором 22 штанги 25, упор 22 поднимается и перестает взаимодействовать с упором 23. Пружина 37 расжимается и вводит стержень 18 в паз 17. Через щтангу 25 и рычаги 27 и 31 стержень 21 выходит из паза 20 и тележка отключается от подающего устройства 9 и подключается к раме 1. В дальнейшем рама 1 перемещается совместно с тележкой 10, а система рьиагов и тяг за счет внутренних сил (сил пружин 36 и 37 разной жесткости) приходит в исходное положение, необходимое для ввода тележки 10 во взаимодействие с подающим устройством 9.
Ввод загрузочной тележки 10 во взаимодействие с подающим устройством 9 производится следующим образом.
Ленточный .конвейер совместно с загрузочной тележкой 10 перемещаются относительно рамы подающего устройства 9, на которой закреплен подпружиненный стержень 21. При этом стержень 21 находится в нижнем положении (пружина не сжата) и при наезде на него клиновидных выступов 19 поднимается вверх, сжимая пружину 37 до тех пор, пока стержень 21 не войдет в паз 20, и таким образом зафиксирует тележку 10 относительно подающего устройства 9. Одновременно через рычаги 27 и 31 тяги и штангу подпружиненный стержень 18 выводится из взаимодействия с пазом 17, образованным выступами 16, закрепленными на раме тележки 10. Ввод и вьшод из взаимодействия стержня 18 производится за счет разной жесткости пружин 36 и 37. В дальнейшем система тяги остается в этом положении и стержень 18 при перемещении конвейера йдоль по- дающего устройства 9 не может попйсть
в паз 17 механи: ; а ч фикс а1цп1, так как штанга 25 с упором 22 взаимодей ствует с упором 23 подпружиненного стержня 18, которьм oтжJt aeт пружину стержня 18 на высоту более глубины паза 17.
Формула изобретения
0
1 . Передвижлой перегрузочный конвейер, включающий размеп1енную между подающим устройством и аккумулирующими бункерами подвижную раму с приводным и обводным барабанами,
5 огибающей последние лентой, опорными напрй ляюпц1ми и установленной на последних загрузочной тележкой и меха низмы фикса1дии загрузочной тележки к подвижной раме и подающем устрой0 ству, выполненные в ш-ще смонтированных в верхней и нижней частях загрузочной тележки выступов с пазами между ними и установленных на подвижной раме и подающем устройстве под5 пружиненных стержней со средством вывода их из пазов выступов, о т - личающийс-я тем, что, с целью упроще1-:ия конструкции и повышения надежности работы, средство вывода подцружиненных стержней из пазов выступов выполнено в В1аде установленного ;ia подвижной раме кулака, смонтированной на подающем устройстве вертикальной направляющей с размещенной в ней штангой и упоров, закрепленных на подпружиненном стержне, установленном на подви;«- ной раме, и нижнем конце штанги с возможностью взаимодействия между собой первого из них с другим упором и кулаком, при этом штанга верхним концом соединена посредством тяги с подпружиненным стержнем, установленным на подающем устройстве, а пружина вьпиеуказанного подпружиненного стержня имеет жесткость, меньшую жесткости пружины подпружиненного стержня, установленного на подающем устройстве.
2,Конвейер поп.1, отличающийся тем, что тяга выполнена
в виде шарнирно установленной на подающем устройстве системы рычагов.
3.Конвейер поп.1, отличающийся тем, что тяга вьшолнена в виде щарнирно установленных на подающем устройстве и связанных между собой посредством гибкого элемента jiaoj-HVTbK двуплечих pi.waron.
5
0
5
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижной перегрузочный конвейер | 1985 |
|
SU1344701A1 |
| Перегрузочное устройство | 1989 |
|
SU1666423A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| ШИРОКОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2019949C1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Линия для термической обработки | 1985 |
|
SU1416519A1 |
| Устройство для выбивки литейных форм | 1975 |
|
SU553043A1 |
| Кормораздатчик | 1986 |
|
SU1387931A1 |
| Ленточный конвейер | 1990 |
|
SU1728098A1 |
| КОНВЕЙЕР ЛЕНТОЧНЫЙ | 2008 |
|
RU2362723C1 |
Изобретение относится к конвейерному транспорту и позволяет упростить конструкцию и повысить надежность устройства в работе. Между подающим устройством (ПУ) и аккумулирующими бункерами установлена подвижная рама (ПР) с приводным и обводным барабанами, огибающей их лентой, опорными направляющими и установленной на последних загрузочной тележкой. Последняя имеет механизмы фиксации к ПР и ПУ, выполненные в виде смонтированных в верхней и нижней ее частях выступов с пазами между ними и подпружиненных стержней. Один из стержней установлен на ПР, а другой - на ПУ. Оба стержня имеют средство вывода их из пазов, выполненное в виде кулака, установленного на ПР, смонтированной на ПУ вертикальной направляющей с размещенной в ней штангой и упоров. Один из упоров установлен на стержне, закрепленном на ПР, с возможностью взаимодействия с кулаком и другим упором, смонтированным на штанге. Верхним концом штанга связана с установленным на ПУ стержнем тягой в виде системы рычагов. Пружина стержня, установленного на ПР, имеет жесткость, меньшую жесткости пружины второго стержня. С ПУ груз попадает на ленту, при этом загрузочная тележка зафиксирована соответствующим стержнем к ПУ и груз передается с ленты к одному из бункеров. Для передачи груза к другому бункеру ПР перемещается относительно ПУ, при этом загрузочная тележка неподвижна. Для прямоточной подачи груза из ПУ к бункерам перемещением ПР осуществляются взаимодействие кулака с упором установленного на ПР стержня, ввод последнего в паз выступа в верхней части загрузочной тележки и вывод стержня на ПУ из паза выступа в нижней части загрузочной тележки через упор, упор штанги и тягу. Затем осуществляются перемещение ПР с загрузочной тележкой и отвод последней из-под бункеров. 1 з.п.ф-лы, 7 ил.
JS 1
CftUP.i
сриг.1
4- Л
в
(pf/гЗ
Фм.Ч
Y///// /
qju.5
BuffB
26
сригб
36
У/7//////Л
Фиг.
| Передвижной перегрузочный конвейер | 1985 |
|
SU1344701A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
