фиг. 2 - то же, при холостом ходе; (Q перемещается в исходное положение,
на
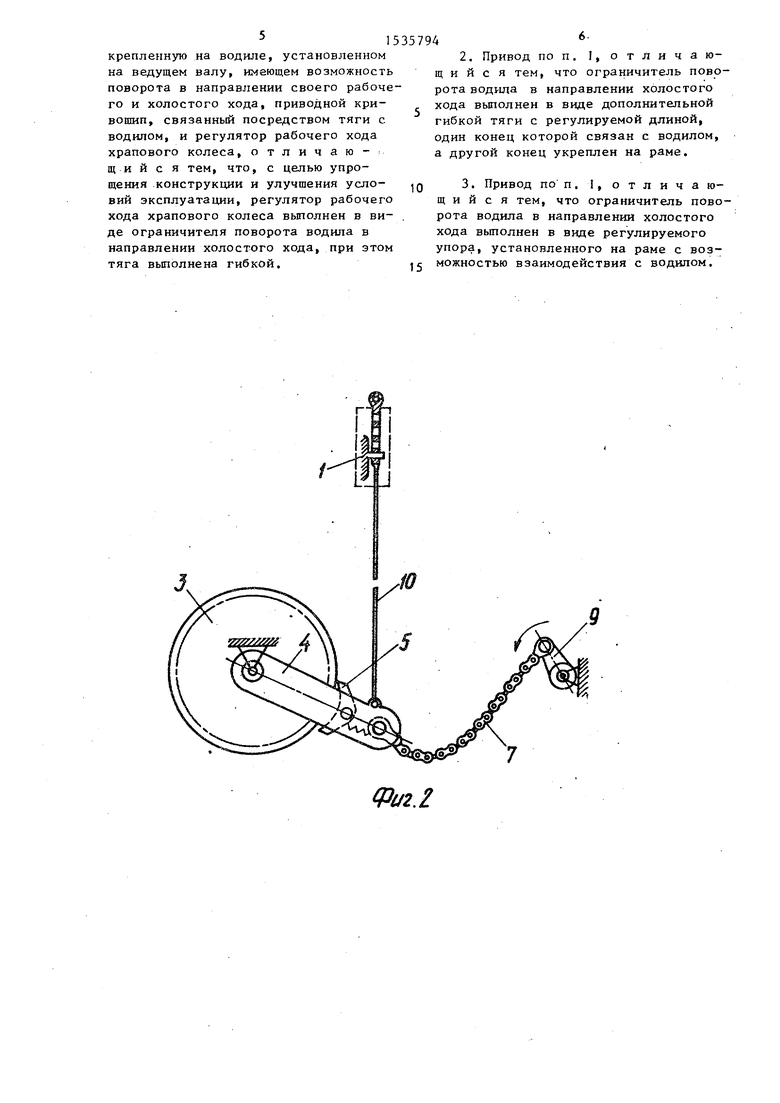
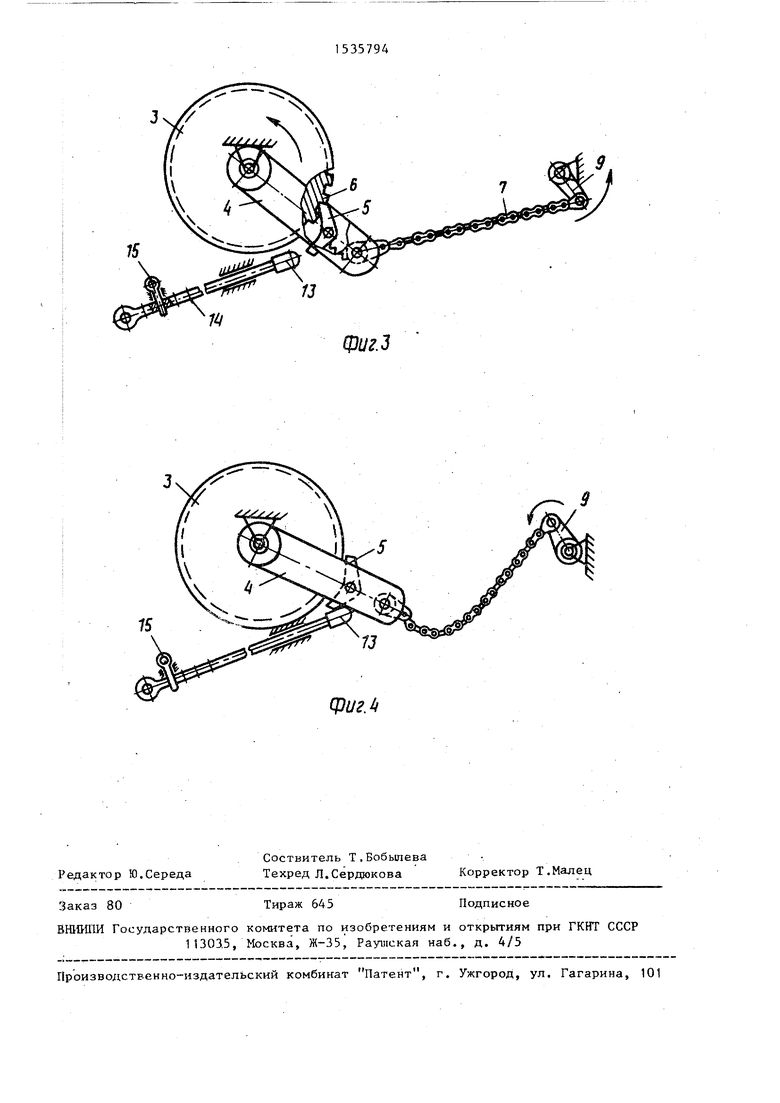
на фиг. 3 - привод при рабочем ходе, второй вариант; на фиг, А - то же, при холостом ходе.
На раме 1 установлен ведущий вал 2 конвейера с. закрепленным на нем jj храповым колесом 3 н шарннрно ус та ноучшшым подшюм 4, имеющим возможность рабочего и обратного холостого хода.
На водиле 4 шарнирно закреплена подпружиненная собачка 5 для взаимо- действия с зубьями 6 храпового коле- а 3. Тяга 7 выполнена в вице нерастн- шмой и гибкой связи и соединена одним концом 8 с приводным кривошипом 9, а другим концом - с водилом 4. 1 л 7 может быть выполнена, например, ь виде О1ррзка цепи, троса и т.п.
Регулятор рабочего хода храпового K lieea выполнен в виде ограничителя
а подпружиненная собачка 5 выходит из зацепления с храповым колесом 3
Регулирование скорости конвейера осуществляется путем ограничения хо лостого хода водила 4, что обеспечи вает смещение исходного положения в дила 4 по окружности храпового коле са 3 в ту или иную сторону по отнош нию к неизменному положению водила в момент остановки при окончании ра бочего хода ,
В первом варианте исполнения (фиг. 1 и 2) это достигается переме щением дополнительной гибкой тяги 10 относительно храпового колеса 3 я ее фиксацией в каждом заданном по ложении фиксатором. В этом случае при рабочем ходе водила 4 искривляе ся дополнительная гибкая тяга 9, а при холостом ходе водила 4 - гибкая тяга 7 .
1оворига водила 4 в направлении холоп
свя 1крепле.н
того хоца. Ограничитель поворота по первому варианту испс шенич выполнен к шп.е дополга-лельпой ;ибкои гн- гн SO с регулируемой дп чой , Одни ко нец дополнительно гибкой тяги 10 чан г водило ч. а ЛУГОЙ на раме 1 посредство:, иксач ора, с помощью которое оеущестнан i гея тлк-ке pui /лнровкл дпшьл л . ПРгтпительнон гибкой тяг 10 Фиксатор вк 1ючаег в себя отверстии 11 ня конце дополнительной гибкой ТЯ1н 10 и штырь I2 иг раме 1,
По нчорому варианту исполнения ограничитель поворота выполнен в виде регулируемо о упора S3, закрепленного ка раме I , с в аимодей- стннч с водилом 4. Фиксатор дня регулируемого упора 13 выполнен из отверстий 14 в регулируемом упоре и штыря 15, расположенного в отверстии на раме,
Привод конвейера работает следующим образом .
При вращении кривошипа 9 в результат t натяжной гибкой тяги 7 водило 4 :,мес ге с подпружиненной собачкой 5 , совершает рабочий ход, поворачиваясь на ад.анный угол относительно исходного
положения водила 4 „ При от.
j
0
0
5
0
5
а подпружиненная собачка 5 выходит из зацепления с храповым колесом 3.
Регулирование скорости конвейера осуществляется путем ограничения холостого хода водила 4, что обеспечивает смещение исходного положения водила 4 по окружности храпового колеса 3 в ту или иную сторону по отношению к неизменному положению водила 4 в момент остановки при окончании рабочего хода ,
В первом варианте исполнения (фиг. 1 и 2) это достигается перемещением дополнительной гибкой тяги 10 относительно храпового колеса 3 я ее фиксацией в каждом заданном положении фиксатором. В этом случае при рабочем ходе водила 4 искривляется дополнительная гибкая тяга 9, а при холостом ходе водила 4 - гибкая тяга 7 .
Во второй варианте исполнения исходное положение водила 4 задается регу пируомым упором 12 с фиксатором его положении относительно храпового колеса i, обеспечивающими заданное изменение в ту или иную сторону величины холостого хода водила 4. При рабочем ходе водила 4 гибкая тяга 7 прямолинейна, я при холостом ходе водила - тяга 7 изгибается.
Использование водила в качестве исполнительного элемента регулятора скорости конвейера . обеспечивает возможность дистанционного, в частности, ручного управления скоростью непосредственно при работе привода, что значительно ускоряет и упрощает процесс настройки привода на заданную производительность конвейера и гнижает затраты времени на выполнение, этой опе рации.
Формула изобретения
1. Привод конвейера, включающий храпоьое колесо, устновленное на ведущем валу, смонтированном на раме, Юдпружчненную собачку, шарнирно заD15
крепленную на водиле, установленном на ведущем валу, имеющем возможность поворота в направлении своего рабочего и холостого хода, приводной кривошип, связанный посредством тяги с водилом, и регулятор рабочего хода храпового колеса, отличающийся тем, что, с целью упрощения конструкции и улучшения уело- вий эксплуатации, регулятор рабочего хода храпового колеса выполнен в виде ограничителя поворота водила в направлении холостого хода, при этом тяга выполнена гибкой.
2.Привод по п. 1, отличающийся тем, что ограничитель поворота водила в направлении холостого хода выполнен в виде дополнительной гибкой тяги с регулируемой длиной, один конец которой связан с водилом,
а другой конец укреплен на раме.
3.Привод по п. I, отличающийся тем, что ограничитель поворота водила в направлении холостого хода выполнен в виде регулируемого упора, установленного на раме с возможностью взаимодействия с водилом.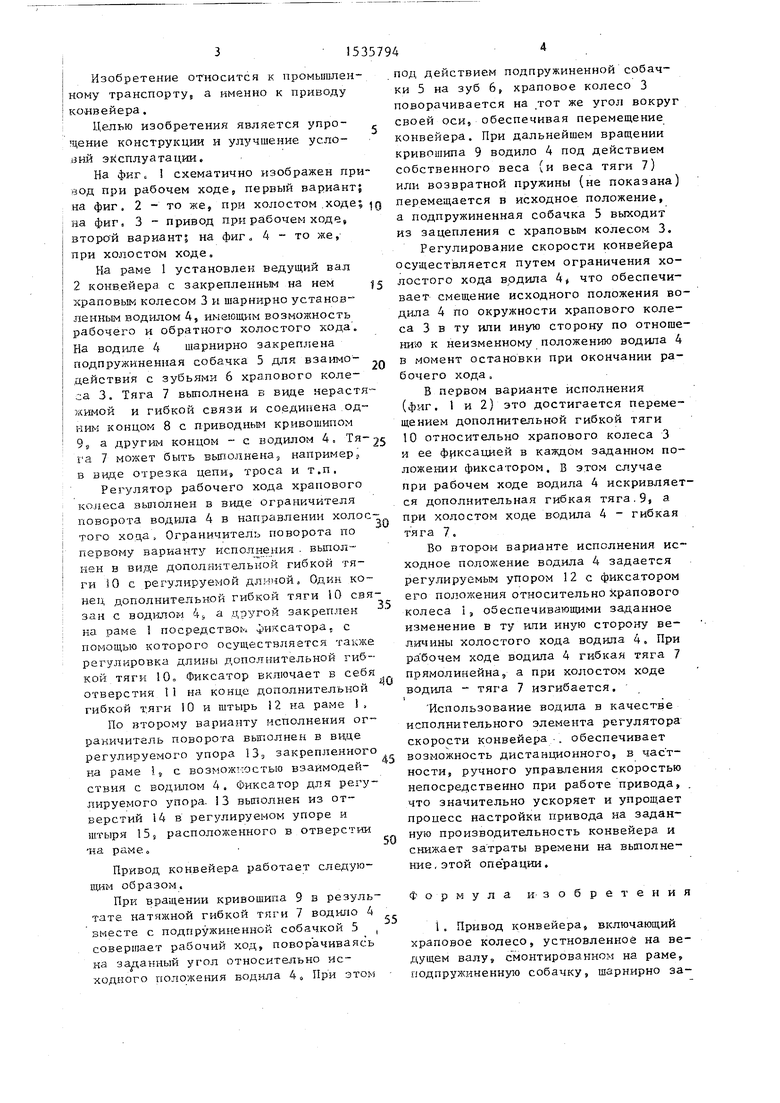
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Механизм привода реверсивного транспортера кормораздатчика | 1987 |
|
SU1493204A1 |
| Механизм для сообщения прерывистого движения тяговому органу | 1986 |
|
SU1388363A1 |
| Станок для нанесения граней на стеклоизделия | 1983 |
|
SU1106640A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Подъемник опалубки | 1980 |
|
SU883295A2 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
| Механизм привода питателя кормов | 1987 |
|
SU1475563A1 |
| Механизм привода реверсивного транспортера машины для распределения сыпучего материала | 1989 |
|
SU1648270A1 |
Изобретение относится к промышленному транспорту и позволяет упростить конструкцию и улучшить условия эксплуатации. На раме 1 привода конвейера смонтирован ведущий вал 2, на котором установлено храповое колесо (К) 3. На ведущем валу 2 установлено шарнирно водило (В) 4 с возможностью поворота в направлении своего рабочего и холостого хода. На В 4 шарнирно закреплена подпружиненная собачка 5. Посредством гибкой тяги (Т) 7 с В 4 связан приводной кривошип 9. Регулятор рабочего хода К 3 выполнен в виде ограничителя поворота В 4 в направлении холостого хода. Ограничитель поворота В 4 выполнен в виде дополнительной гибкой Т 10 с регулируемой длиной, один конец которой связан с В 4, а другой закреплен на раме 1. Ограничитель поворота В 4 может быть выполнен также и в виде регулируемого упора, закрепленного на раме 1 с возможностью взаимодействия с В 4. Регулирование скорости конвейера осуществляется путем ограничения с помощью Т 10 холостого хода В 4 и смещения тем самым В 4 по окружности К 3 в ту или иную сторону по отношению к неизменному положению В 4 в момент остановки при окончании рабочего хода. 2 з.п. ф-лы, 4 ил.
Фиг.Z
/5
74
15
фиг. 4
Редактор Ю.Середа
Соствитель Т.Бобылева Техред Л.Сердюкова
Заказ 80
Тираж 645
ВНШШИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг.З
l /SV/
Корректор Т.Малец
Подписное
| Механизм привода реверсивногоТРАНСпОРТЕРА КОРМОРАздАТчиКА | 1979 |
|
SU793519A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм привода подающего транспортера | 1985 |
|
SU1329705A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
