Изобретение относится к машиностроению и предназначено для автоматизации технологических процессов сборки с применением промышленных роботов и манипуляторов.
Целью изобретения является повышение надежности работы.
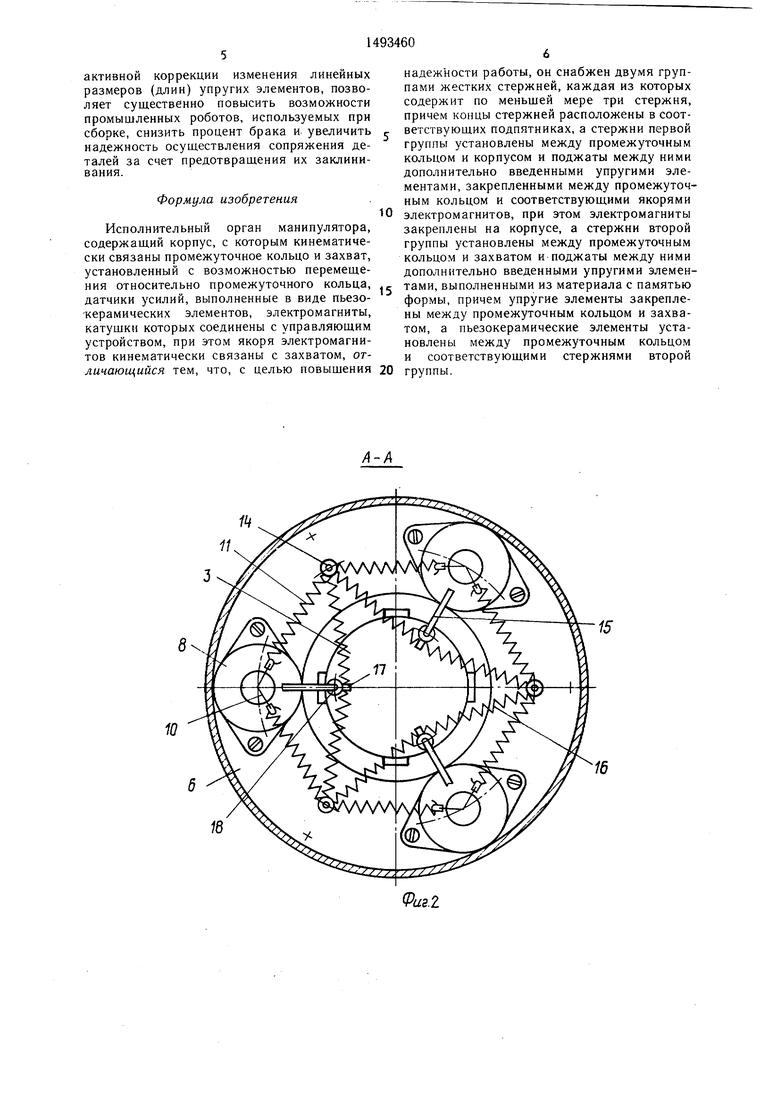
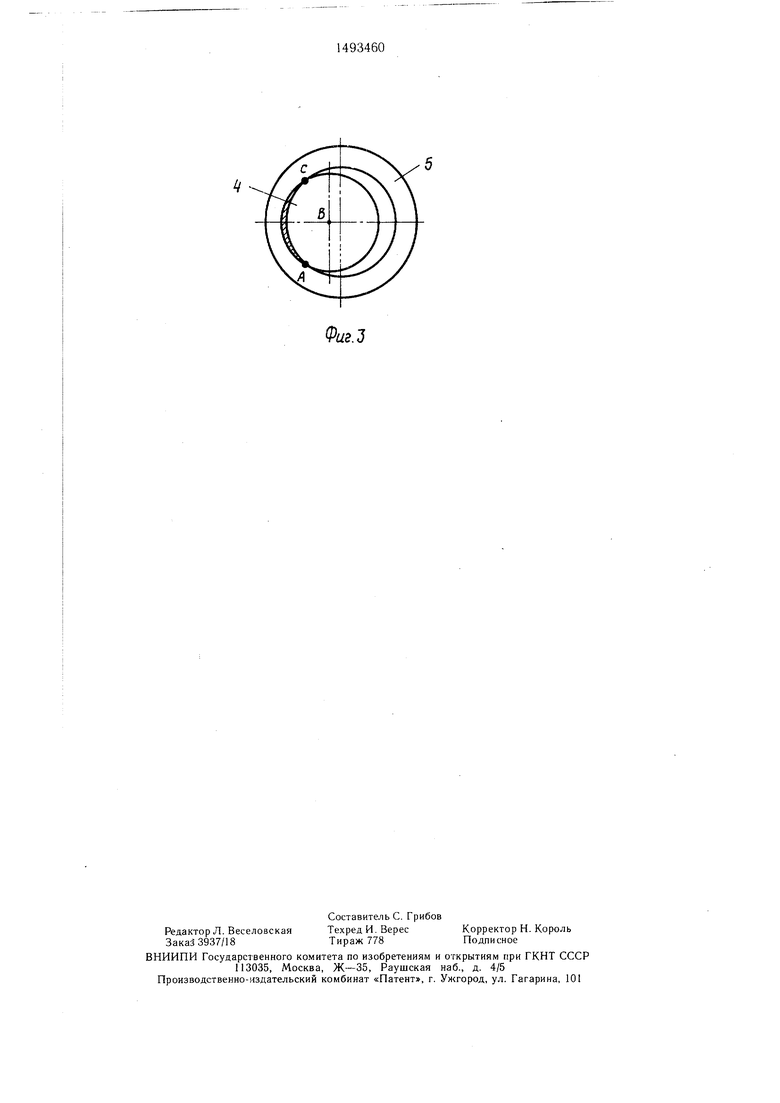
На фиг. 1 изображен исполнительный орган манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема контакта детали со втулкой.
Исполнительный орган содержит корпус 1 и соосно расположенные промежуточное кольцо 2, захват 3 с удерживаемой деталью 4, предназначенной для сопряжения с базовой втулкой 5. На фланце 6 корпуса 1 по окружности установлены по меньшей мере три электромагнита 7, расположенные в корпусах 8, выполненные, как и фланец 6, из диэлектрического материала. К якорям 9 этих электромагнитов прикреплены одни концы гибких звеньев (тросиков) 10..Другие концы звеньев 10 присоединяются к концам упругих элементов (пружинам) 11, другие концы которых крепятся к проушине 12 подпятника 13, выполненного из твердосплавного материала. Упругие элементы 11 удерживают в равновесном состоянии по меньшей мере три жестких стержня 14, расположенные между фланцем 6 и промежуточным кольцом 2 параллельно продольной оси исполнительного органа. Между кольцом 2 и захватом 3 расположены не менее трех жестких стержней 15, наклонных к оси исполнительного органа, находящихся в равновесном состоянии при помоши упругих элементов 16, выполненных из материала с памятью формы. Элементы 16 крепятся.к проушине 17, которая изготовлена из диэлектрического материала и прикреплена совместно с подпятником 18 к захвату 3. Стержни 15 установлены в подпятниках 18 и 19. Между подпятником 19 и кольцом 2 расположены датчики 20 усилий, выполненные в виде пьезо- керамических элементов, электроды которых соединены через плечи измерительного моста с устройством управления (не показано). Устройство управления соединяет катушки электромагнитов 7 с источником энергии (не показан).
Исполнительный орган работает следующим образом.
Промышленный робот грубо позиционирует деталь 4 над жестко закрепленной в сборочном приспособлении базовой втулкой 5 и производит сборочное движение. При совпадении осей симметрии собираемых компонентов происходит их сборка. Если же оси не совпадают, то при контакте на свободный конец детали 4, удерживаемой захватом 3, действуют силы и моменты, сме- ш,аюшие устанавливаемую деталь 4 в сторону сопряжения с базовой втулкой 5, деформируя при этом упругие элементы 11 и 16.
5
0
5
В случае торцового контакта возникающие при взаимодействии собираемых деталей усилия направлены перпендикулярно торцовым поверхностям деталей и действуют по цепочке элементов: удерживаемая деталь, захват 3, проушины 17, подпятники 18, жесткие стержни 15, подпятники 19, пьезокера- мические элементы 20, промежуточное кольцо 2, упругие элементы 11, гибкие звенья 10, якоря 9, электромагниты 7, фланец 6, корпус 1, промышленный робот. При торцовом взаимодействии соединяемых деталей не происходит смещения присоединяемой детали 4 в сторону отверстия базовой втулки 5. При этом на измерительных электродах пьезо- керамических элементов 20 появляется разность потенциалов, сигнализирующая о деформациях этих элементов. Сигнал о величине разности потенциалов поступает в устройство управления, и в зависимости от показаний измерительных электродов управляющее устройство подключает к источнику энергии катушки определенных электромагнитов 7. При включении одного из этих электромагнитов 7 или их комбинаций происходит втягивание якорей 9 и увеличение первоначальных линейных размеров конкретных упругих элементов 11. Увеличение линейных размеров упругих элементов 11, например левых, вызывает увеличение усилий этих элементов, воздействующих на промежуточное кольцо 2, и приводит к нарушению равновесного состояния кольца 2. При этом кольцо 2 прямолинейно смещается в сторону (левую) до момента, когда снова не наступит равновесное состояние, т. е. усилия одних упругих элементов 11, действующих в одну сторону, не уравновесятся усилиями, других элемен5 тов 11, действующими в противоположную сторону. Линейное смещение соединяемых деталей наиболее целесообразно использовать при первоначальном торцовом взаимодействии сборочных компонентов.
В случае возникновения заклинивания соединяемых деталей необходимо осуществлять только относительный разворот этих деталей, для чего управляющее устройство подает сигнал на обогрев упругих элементов 16, материал которых обладает эффек5 том памяти формы, деформируясь только вдоль собственной продольной оси, элементы 16 разворачивают захват 3 и деталь 4 относительно точки пересечения осей наклонных стержней 15 и продольной оси линейно смещенного промежуточного кольца 2. Осу0 ществление раздельной линейной и угловой коррекции взаиморасположения деталей в процессе сборки необходимо для осуществления гарантированной сборки соединяемых компонентов.
Применение предлагаемого исполнительного органа, осуществляющего раздельную компенсацию линейной и угловой составляющих суммарной ощибки рассогласования осей симметрии соединяемых деталей путем
0
0
5
активной коррекции изменения линейных размеров (длин) упругих элементов, позволяет существенно повысить возможности промышленных роботов, используемых при сборке, снизить процент брака и увеличить надежность осуществления сопряжения деталей за счет предотвращения их заклинивания.
Формула изобретения
Исполнительный орган манипулятора, содержащий корпус, с которым кинематически связаны промежуточное кольцо и захват, установленный с возможностью перемещения относительно промежуточного кольца, датчики усилий, выполненные в виде пьезо- -керамических элементов, электромагниты, катущки которых соединены с управляющим устройством, при этом якоря электромагнитов кинематически связаны с захватом, отличающийся тем, что, с целью повыщения
0
0
5
надежности работы, он снабжен двумя группами жестких стержней, каждая из которых содержит по меньщей мере три стержня, причем концы стержней расположены в соответствующих подпятниках, а стержни первой группы установлены между промежуточным кольцом и корпусом и поджаты между ними дополнительно введенными упругими элементами, закрепленными между промежуточным кольцом и соответствующими якорями электромагнитов, при этом электромагниты закреплены на корпусе, а стержни второй группы установлены между промежуточным кольцом и захватом и поджаты между ними дополнительно введенными упругими элементами, выполненными из материала с памятью формы, причем упругие элементы закреплены между промежуточным кольцом и захватом, а пьезокерамические элементы установлены между промежуточным кольцом и соответствующими стержнями второй группы.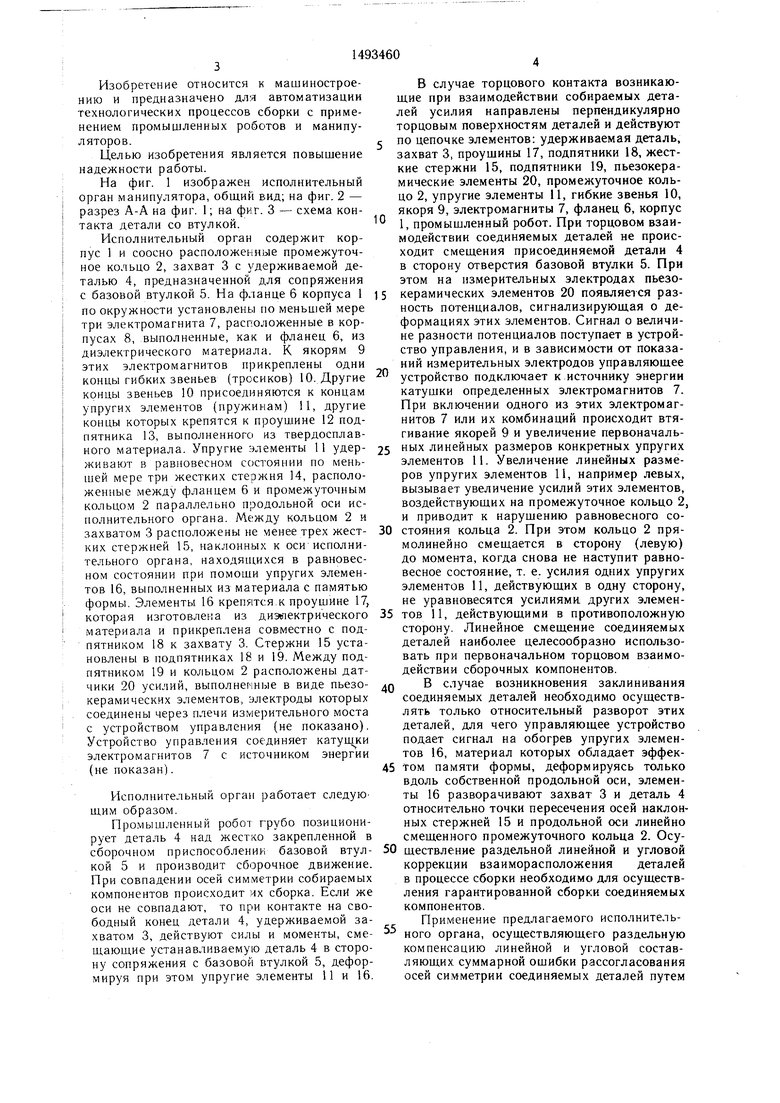
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1985 |
|
SU1284828A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1468743A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1284767A1 |
| Устройство для сборки изделий | 1978 |
|
SU778990A1 |
| Устройство для установки эластичных уплотнительных колец | 1990 |
|
SU1794643A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Схват | 1982 |
|
SU1074712A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Устройство для сборки | 1984 |
|
SU1177113A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
Изобретение относится к машиностроению и предназначено для автоматизации процессов сборки деталей. Цель изобретения - повышение надежности работы. Захват 3 установлен подвижно относительно корпуса 1 с помощью жестких стержней 14 и 15 и промежуточного кольца 2. Конструкция подвески захвата 3 находится в равновесном состоянии за счет упругих элементов 11 и 16. Упругие элементы 16 выполнены из материала с памятью формы и предназначены также для поворота захвата 3 вокруг его продольной оси. Упругие элементы 11 соединены с якорями 9 электромагнитов 7, которые закреплены на корпусе 1. При нестыковке детали 4 и втулки 5 нагрузка на деталь 4 воспринимается датчиками 20 усилий. Сигналы от датчиков 20 поступают в управляющее устройство, которое подключает к источнику энергии определенные электромагниты 7. Якоря 9 этих электромагнитов втягиваются, перемещая промежуточное кольцо 2 вместе с захватом 3. Датчики 20 выполнены в виде пьезокерамических элементов. 3 ил.
14
11
16
16
| Схват | 1985 |
|
SU1284828A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
