7 8
ФагЛ
3 I I
со
со
4ik
о:
К)
Изобретение относится к машинострое- 1НИЮ, а именно к робототехнике, и является дополнительным к а. с. но заявке № 4220904/ /08.
Цель изобретения - повьииение надежности работы схвата за счет установки на корнусе схвата упоров, взаимодействующих с нерабочими поверхностями захватных губок.
I На фиг. 1 изображен схват манипулятора, i общий вид; на фиг. 2 - губка схвата в де- I формированном состоянии; на фиг. 3 - I схват манипулятора в момент введения его I в ограниченное пространство рабочей зоны; на фиг. 4 - то же, в рабочем положении. Схват манипулятора содержит губки 1, выполненные в виде плоских упругих пластин Ш-образной формы с произвольным числом концов 2 и 3, губки 1 установлены на корпусе симметрично оси схвата. Концы 3 прикреплены к призме 4, которая жестко связана с корпусом привода 5 деформации губок (тянущего или толкающего действия), установленным на грузоподъемном механизме, и является корпусом схвата манипулятора. К щтоку 6 привода 5 деформации прикреплена подвижная планка 7, к которой прикреплены концы 2 губок 1. На корпусе со стороны нерабочих поверхностей губок 1 жестко закреплены упоры 8. В свободном
состоянии губки 1 имеют плоскую форму и прилегают к упорам 8.
При выполнении губок I Ш-образной формы с произвольным числом концов 2 и 3 последние поочередно жестко связаны соответственно с корпусом (призмой 4) и с приводом деформации (планкой 7).
Схват манипулятора работает следующим образом.
Схват манипулятора вводится губками 1 в ограниченное пространство, окружающее цилиндрическую деталь, до прилегания призмы 4 к детали. При срабатывании привода 5 деформации планка 7 движется к призме 4, происходит упругая деформация губок 1, 5 при этом нерабочие поверхности упругих пластин упираются в упоры 8. Губки 1, изгибаясь, охватывают деталь и прижимают ее к призме, обеспечивая тем самым центрирование, фиксацию и зажим детали.
20
Формула изобретения
Схват манипулятора по авт. св. № 1437221, отличающийся тем, что, с целью повыщения надежности работы схвата, он снабжен упорами, установленными на корпусе и имеющими возможность взаимодействия с нерабочими поверхностями захватных губок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1437221A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват | 1981 |
|
SU960007A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
Изобретение относится к машиностроению, а именно к робототехнике. Цель изобретения - повышение надежности работы схвата за счет установки на корпусе схвата упоров, взаимодействующих с нерабочими поверхностями захватных губок. Схват манипулятора содержит губки 1, выполненные в виде упругих пластин, кольца 3 которых закреплены на призме 4, а концы 2 - на подвижной планке 7. Планка 7 закреплена на штоке 6 привода 5. На корпусе со стороны нерабочих поверхностей губок 1 жестко установлены упоры 8. При срабатывании привода 5 планка 7 движется к призме 4, происходит деформация губок 1. При этом нерабочие поверхности губки 1 упираются в упоры 8, а губки 1, изгибаясь, охватывают деталь и прижимают ее к призме 4. 4 ил.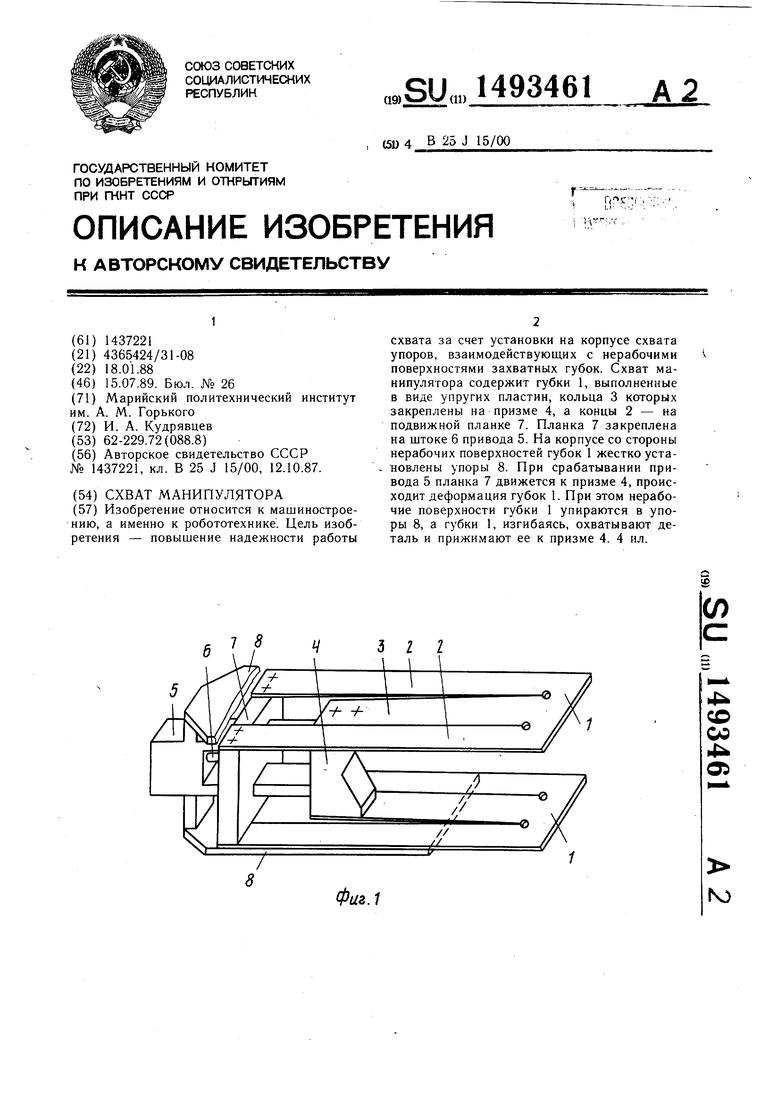
Фиг. г
Риг.З
1 |.дакто) Л. 15есо. 1()зская Закяз 3937118
( оставите.:)) .. Чернышей
Техред И. ВересКорректор Т. ,,ieu
Тираж 778Подписное
ВНИИПИ Гос дарственного комитета ио изобретениям и открытиям при ГКНТ СССР
113035, ocквa, Ж-35, Раушская наб., д. 4/5 Производственно-издательский каыблнат «Патент, г. Ужгород, ул. Гагарина, 101
5й/г.//
| Схват манипулятора | 1987 |
|
SU1437221A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
