(54) СХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1981 |
|
SU952581A1 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват промышленного робота | 1985 |
|
SU1286404A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
1
Изобретение относится к робототехнике, в частности к захватным органам промышленных роботов и манипуляторов.
Известен схват, содержаш.ий корпус, рычаги с губками на концах и приводной механизм 1.
Недостатком известного схвата является его узкие технологические возможности, а именно невозможность изменения усилия зажима в зависимости от вида зажимаемой детали.
Цель изобретения - расширение технологических возможностей за счет регулирования усилия зажима.
Цель достигается тем, что схват снабжен упором, подпружиненным в направлении оси схвата и выполненным в виде планки с прорезями на ее концах, в которых размещены рычаги, внутренние, обращенные друг к другу, поверхности которых имеют профильную поверхность.
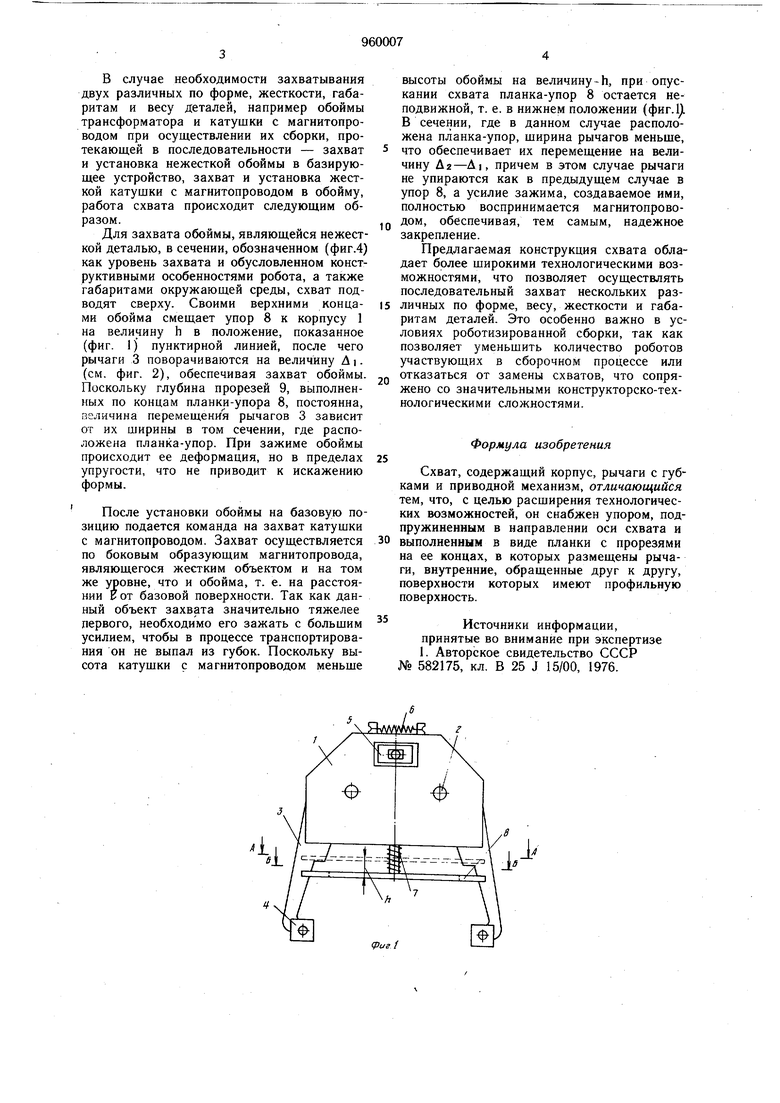
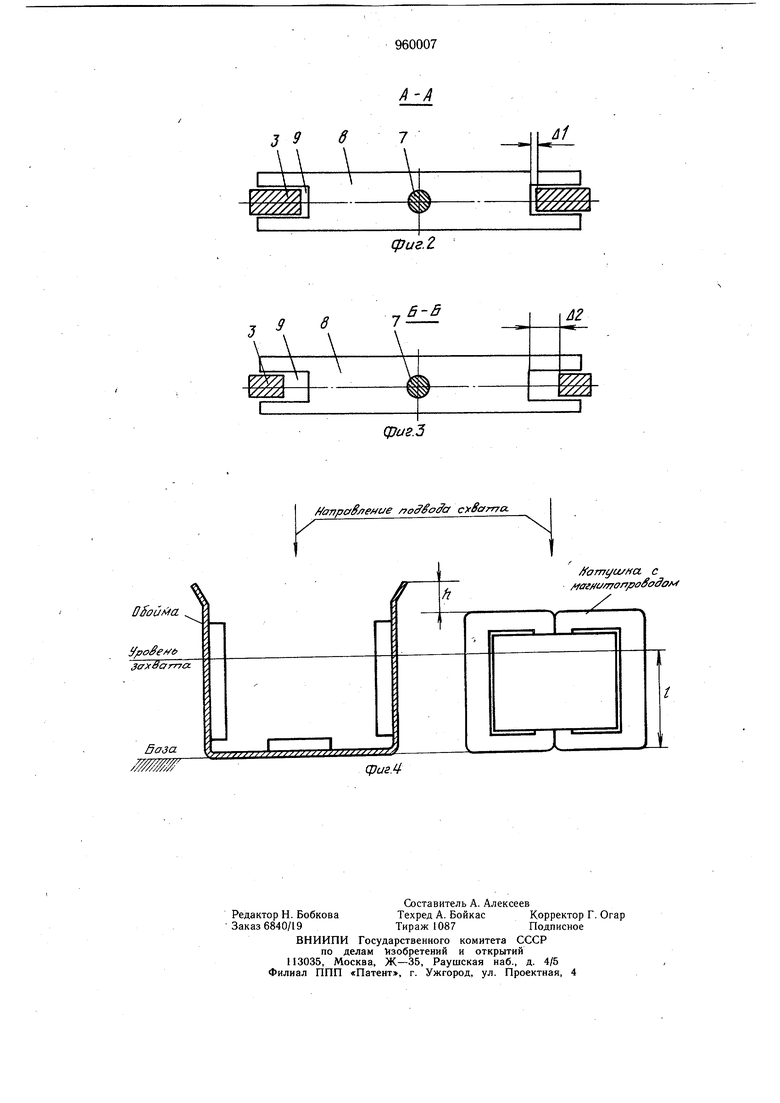
На фиг. 1 представлен схват, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - примеры захватываемых схватом деталей различной жесткости, габаритов и веса.
Схват (фиг. 1-3) содержит коробчатый , корпус 1, в котором на осях 2 установлены поворачивающиеся рычаги 3 с губками 4 на концах. Внутренняя поверхность рычагов выполняется ступенчатой или криволи5 нейной формы, что обеспечивает их переменную ширину в различных сечениях по мере удаления от губок. В верхней части корпуса расположен приводной механизм 5 (клиновой) сведения рычагов. Пружина 6 Q служит для разведения рычагов, т. е. для их возврата в исходное положение. Между рычагами 3 на штоке 7, смонтированном в корпусе схвата, размещен подпружиненный и подвижный в направлении оси схвата упор 8 в виде планки с прорезями 9 на кон15 цах под рычаги.
Схват работает следующим образом.
После перемещения схвата в зону расположения захватываемого объекта подается команда на сведение рычагов 3 с губками 4 2Q под захватываемый объект, что обеспечивается с помощью клинового приводного механизма 5, действующего на верхние концы рычагов и вызывающего их поворототносительно осей 2. Разжим рычагов осуществляется пружиной 6. В случае необходимости захватывания двух различных по форме, жесткости, габаритам и весу деталей, например обоймы трансформатора и катушки с магнитопроводом при осуществлении их сборки, протекающей в последовательности - захват и установка нежесткой обоймы в базирующее устройство, захват и установка жесткой катушки с магнитопроводом в обойму, работа схвата происходит следующим образом. Для захвата обоймы, являющейся нежесткой деталью, в сечении, обозначенном (фиг.4) как уровень захвата и обусловленном конструктивными особенностями робота, а также габаритами окружающей среды, схват подводят сверху. Своими верхними концами обойма смещает упор 8 к корпусу 1 на величину h в положение, показанное (фиг. 1) пунктирной линией, после чего рычаги 3 поворачиваются на величину А i. (см. фиг. 2), обеспечивая захват обоймы. Поскольку глубина прорезей 9, выполненных по концам планки-упора 8, постоянна, п:-личина перемещения рычагов 3 зависит от их ширины в том сечении, где расположена планка-упор. При зажиме обоймы происходит ее деформация, но в пределах упругости, что ие приводит к искажеиию формы. После установки обоймы иа базовую позицию подается команда на захват катушки с магнитопроводом. Захват осуществляется по боковым образующим магнитопровода, являющегося жестким объектом и на том же уровне, что и обойма, т. е. на расстоянии EOT базовой поверхности. Так как данный объект захвата значительно тяжелее первого, необходимо его зажать с большим усилием, чтобы в процессе транспортирования он не выпал из губок. Поскольку высота катушки с магнитопроводом меньше
CL-,j.
. .
фие.{ ысоты обоймы на величину-h, при опусании схвата планка-упор 8 остается неодвижной, т. е. в нижнем положении (фиг.у. сечении, где в даниом случае расположена планка-упор, ширина рычагов меньше, что обеспечивает их перемещение на величину Д2-AI, причем в этом случае рычаги не упираются как в предыдущем случае в упор 8, а усилие зажима, создаваемое ими, полностью воспринимается магнитопроводом, обеспечивая, тем самым, надежное закрепление. Предлагаемая конструкция схвата обладает более широкими технологическими возможностями, что позволяет осуществлять последовательный захват нескольких различных по форме, весу, жесткости и габаритам деталей. Это особенно важно в условиях роботизированной сборки, так как позволяет уменьшить количество роботов участвующих в сборочном процессе или отказаться от замены схватов, что сопряжено со значительными конструкторско-технологическими сложностями. Формула изобретения Схват, содержащий корпус, рычаги с губками и приводной механизм, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен упором, подпружиненным в направлении оси схвата и выполненным в виде планки с прорезями на ее концах, в которых размещены рычаги, внутренние, обращенные друг к другу, поверхности которых имеют профильную поверхность. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 582175, кл. В 25 J 15/00, 1976.
f/апраВление c fSorrra.
сриг.1
g}tjs.3
