f
,,/r-H
/ч/ /I/ / Р
7
м
I
f J /
-е
СО
-е
Ю
ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1988 |
|
SU1493461A2 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1984 |
|
SU1194675A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫРОВНЕННОЙ ПАЧКИ ЛИСТОВОГО МАТЕРИАЛА И ИСПОЛЬЗУЕМЫЙ НАБОР | 2015 |
|
RU2632174C2 |
| Схват манипулятора | 1981 |
|
SU1009757A1 |
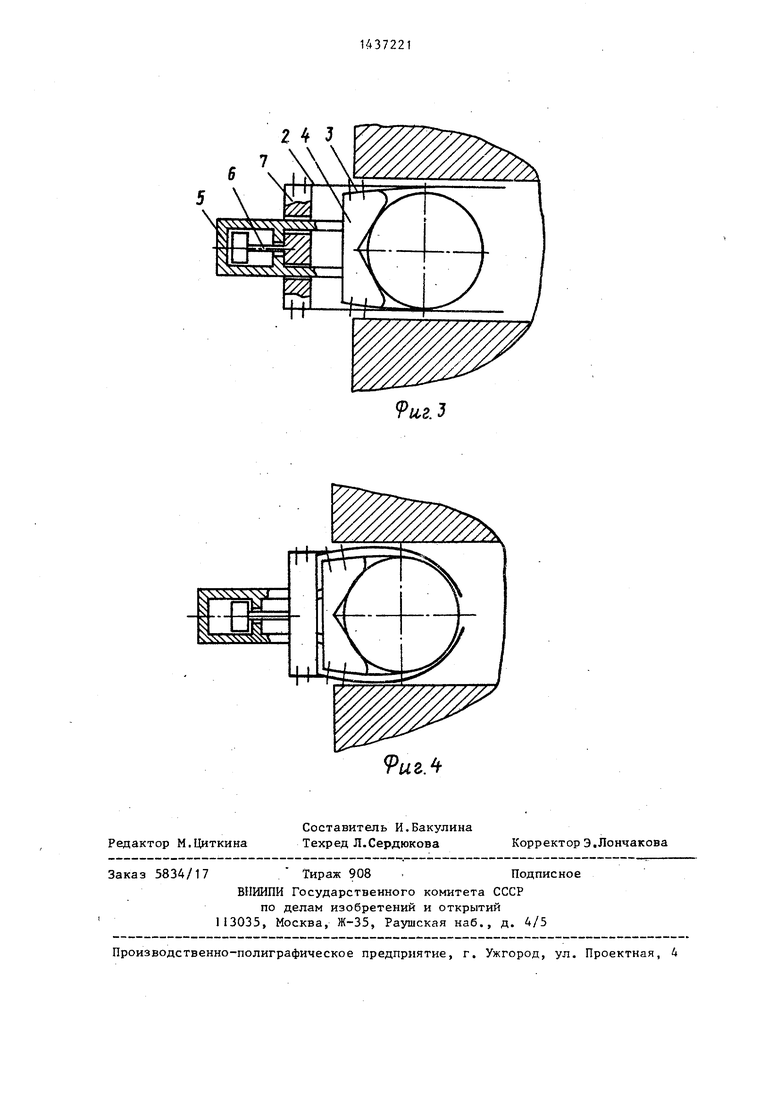
Изобретение относится к машиностроению, а именно к робототехнике. Целью изобретения является расширение технологических возможностей за счет обеспечения работы в ограниченном пространстве. Для этого губки 1 вьшолнены в виде плоских упругих пластин Ш-образной формы с произволь- HbD числом концов 2 и 3. Концы 3 прикреплены к призме 4, которая жестко связана с корпусом привода 5 деформации губок, являющимся корпусом охвата, К штоку 6 привода 5 деформации прикреплена подвижная планка 7, к которой прикреплены концы 2 губок 1. При срабатывании привода 5 деформаций планка 7 движется к призме 4 при этом происходит упругая деформация губок 1, Губки 1, изгибаясь, охватывают деталь и прижимают ее к призме 4, обеспечивая тем самым центрирование, фиксацию и зажим. 4 ил, I
fftfe.f
Изобретение относится к машиностроению, а именно к робототехнике.
Целью изобретения является расширение технологических возможностей за счет обеспечения работы в ограниченном пространстве.
На фиг. 1 изображен схват манипулятора, общий вид; на фиг. 2 - губка |схвата в деформированном состоянии; |на фиг. 3 - схват манипулятора в мо- 1мент введения его в ограниченное про- (странство рабочей зоны; на фиг. 4 - то же, в рабочем положении. I Схват манипулятора содержит губки |1, вьшолненные в виде плоских упругих (пластин Ш-образной формы с произволь- |Ным числом концов 2 и 3, Губки 1 ус- |таиовлены на корпусе симметрично оси схвата. Концы 3 прикреплены к призме;
Ьривода 5 деформации губок (тянущего |или толкающего действия), установлен- |ным на грузоподъемном механизме, и |является корпусом схвата манипулято- |ра, К штоку 6 привода 5 деформации |прикреплена подвижная планка 7, к Которой прикреплены концы 2 губок 1. IB свободном состоянии губки 1 имеют шоскую форму.
При вьшолнении губок 1 Ш образной формы с произвольным числом концов 3 и 2 последние поочередно жестко- связаны соответственно с корпусом (призмой 4) и приводом деформации (планкой 7).
Q
0
5
0
5
Схват манипулятора работает следующим образом.
Схват манипулятора вводится губками 1 в ограниченное пространство, окружающее цилиндрическую деталь, до прилегания .призмы 4 к детали. При. срабатывании привода 5 деформации планка 7 движется к призме 4, при этом происходит упругая деформация губок 1. Губки 1, изгибаясь, охваты-, вают деталь и прижимают ее к призме, обеспечивая тем самьгм центрирование, фиксацию и зажим, детали.
Такая конструкция схвата манипуля тора позволяет захватывать детали в стесненном пространстве благодаря малым поперечным габаритам губок.
Формула изо(бретения
Схват манипулятора, содержащий корпус, губки в виде плоских упругих пластин, установленные на корпусе симметрично оси схвата, и привод их деформации, отличающийся тем, что, с целью расширения технологических возможностей за счет, обеспечения работы в ограниченном пространстве, плоская упругая пластина каждой губки вьшолнена Ш-образной формы с произвольным числом концов, причем концы каждой губки поочередно жестко связаны .с корпусом и с приводом деформации.
&.2
9игЛ
| Схват | 1981 |
|
SU952581A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| . | |||
