кронштейне. В нижней части станины 1 имеется механизм выгрузки, состоящий из ползуна, приводимого в движение цилиндром. Выгрузку осуществляют на транспортер. Кроме того, для за- кренления пружины кручения на ложементе 3 вкладыш 4 имеет паз. На шпиндеше 5 также имеются паз и
центральное отверстие. Операции загрузки, динамического и спытания, подрезки конца пружины в размер и выгрузку производят ротором 2 с равномерно распределенными неподвижными закрепленными ложементами 3 одновременно и непрерывно на всех этих позициях. 1 з.п.ф-лы, 3 ил.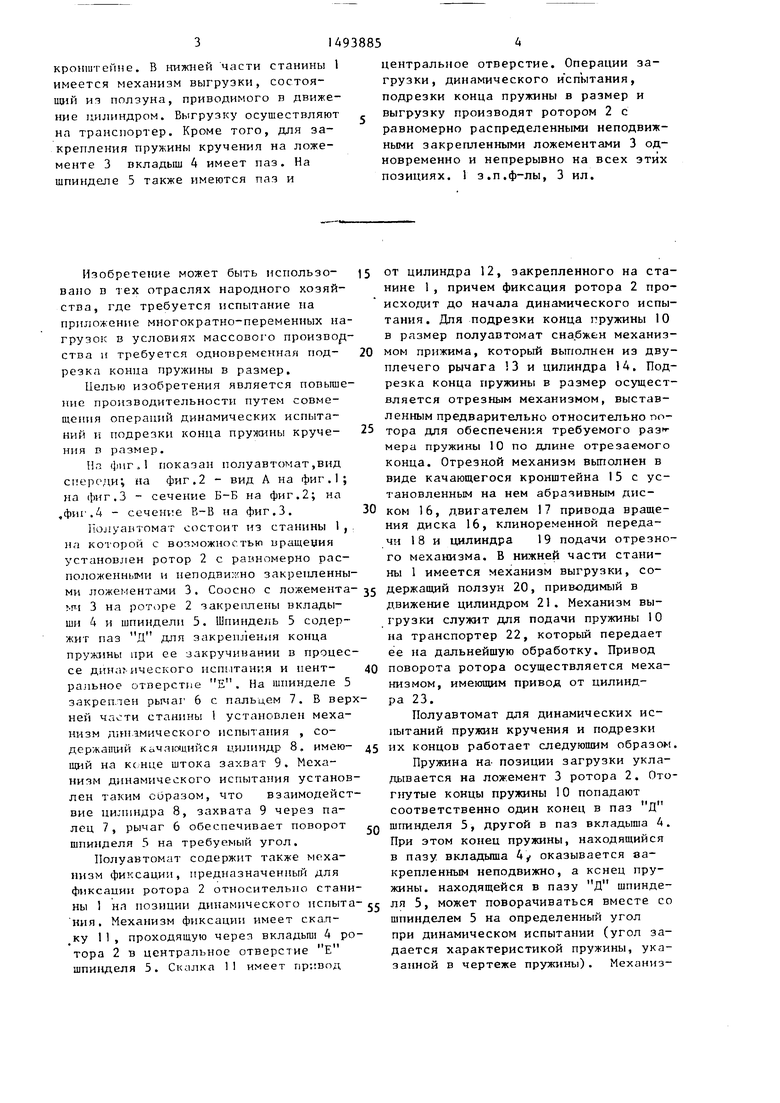
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки пластинчатой цепи | 1991 |
|
SU1784404A1 |
| Резьбонакатной полуавтомат | 1988 |
|
SU1625568A1 |
| ТРУБОРЕЗНЫЙ АВТОМАТ | 1993 |
|
RU2085343C1 |
| АБРАЗИВНО-ОТРЕЗНОЙ ПОЛУАВТОМАТ | 1971 |
|
SU306689A1 |
| Вертикальный давильно-отрезной полуавтомат | 1982 |
|
SU1082520A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Полуавтомат для сборки цепи с расклепываемыми осями | 1981 |
|
SU994196A1 |
| МНОГОШПИНДЕЛЬНЫЙ ПОЛУАВТОМАТ | 1966 |
|
SU222843A1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1986 |
|
SU1399827A1 |
| Протяжной автомат | 1979 |
|
SU850334A1 |
Изобретение может быть использовано в тех областях народного хозяйства, где требуется испытание на приложение многократно переменных нагрузок. Целью изобретения является повышение производительности путем совмещения операций динамических испытаний и подрезки конца пружины кручения в размер. Полуавтомат содержит ротор 2, установленный в станине 1. Ротор по периметру снабжен ложементами 3, соосно которым закреплены на нем вкладыши 4 и шпиндели 5, а каждый шпиндель со стороны, противоположной вкладышам , имеет рычаг 6 с пальцами 7. Посредством пальца 7 ротор во время испытания пружин 10 кручения взаимодействует с механизмом динамического испытания, который снабжен механизмом фиксации для закрепления ротора 2 относительно станины 1 и состоит из качающегося цилиндра 8 и захвата 9. Механизм фиксации содержит скалку 11, которая проходит через вкладыш и центральное отверстие шпинделя 5. Скалка 11 имеет привод от цилиндра 12, закрепленного на станине. Для подрезки конца пружины в размер полуавтомат снабжен отрезным механизмом, состоящим из абразивного диска, двигателя вращения диска и цилиндра подачи отрезного механизма. Отрезной механизм установлен на качающемся кронштейне. В нижней части станины 1 имеется механизм выгрузки, состоящий из ползуна, приводимого в движение цилиндром. Выгрузку осуществляют на транспортер. Кроме того, для закрепления пружины кручения на ложементе 3 вкладыш 4 имеет паз. На шпинделе 5 также имеются паз и центральное отверстие. Операции загрузки, динамического испытания, подрезки конца пружины в размер и выгрузку производят ротором 2 с равномерно распределенными неподвижными закрепленными ложементами 3 одновременно и непрерывно на всех этих позициях. 1 з.п. ф-лы, 3 ил.
Изобретение может быть использо- вано в тех отраслях народного хозяйства, где требуется испытание на приложение многократно-переменных нагрузок в условиях массового производства и требуется одновременная под- резка конца пружины в размер.
Целью изобретения является повышение производительности путем совмещения операций динамических испытаний и подрезки конца пружины кручения о размер.
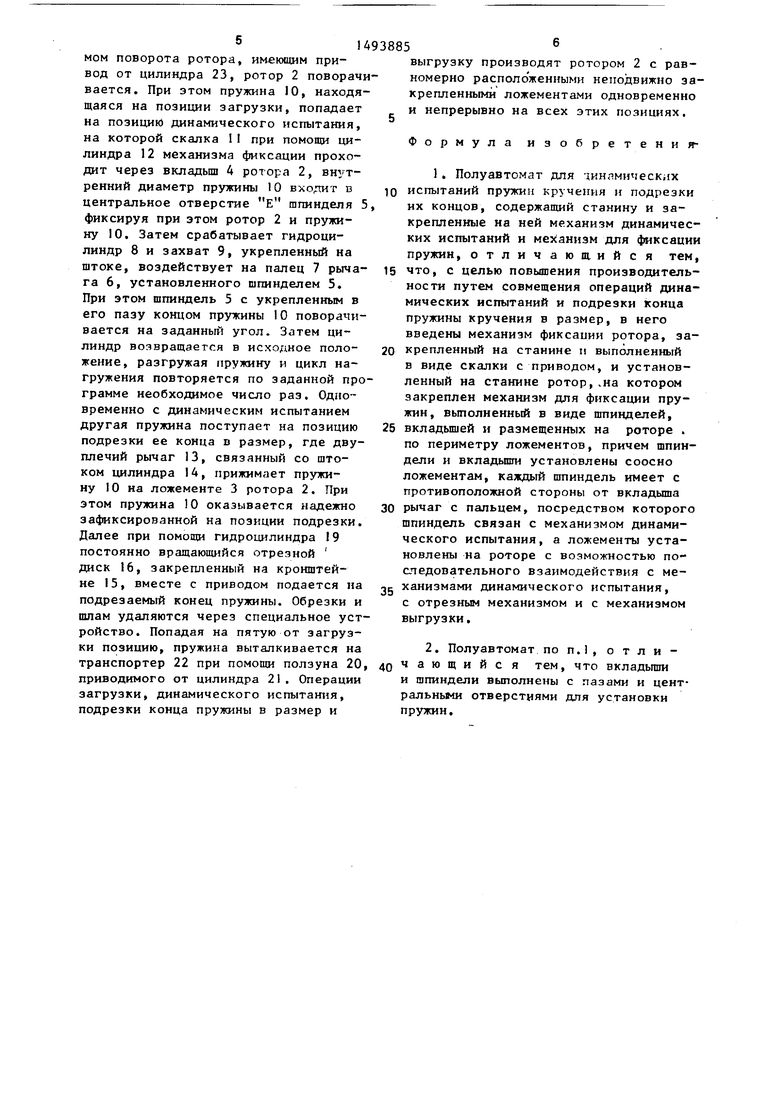
Па фиг.1 показан полуавтомат,вид спереди на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг.2; на ,фиг.4 - сечение В-В на фиг.З.
Полуавтомат состоит из станины 1, на которой с возможностью вращения установлен ротор 2 с равномерно расположенными и неподвижно закрепленными ложементами 3. Соосно с ложемента- NH-i 3 на роторе 2 закреплены вкладыши 4 и шпиндели 5. Шпиндель 5 содержит паз Д для закрепления конца пружины при се закручинании в процессе динагического испмтания и пент- ральное отверстие Е. На шпинделе 5 закреплен рычаг 6 с пальцем 7. В верхней части станины 1 установлен механизм динамического испытания , со- держапщй кача101дийся цилиндр 8. имею- щий на конце штока захват 9. Механизм динамического испытания установлен таким образом, что взаимодействие ци:п1ндра 8, захвата 9 через палец 7, рычаг 6 обеспечивает поворот шпинделя 5 на требуемый угол.
Полуавтомат содержит также механизм фиксации, предназначенный для фиксации ротора 2 относительно станины 1 на позиции динамического испыта НИЛ. Механизм фиксации имеет скал- ку 11, проходящую через вкладьш 4 ротора 2 в центральное отверстие Е шпинделя 5. Скалка 11 имеет привод
от цилиндра 12, закрепленного на станине 1, причем фиксация ротора 2 происходит до начала динамического испытания. Для подрезки конца пружины 10 в размер полуавтомат снабжен механизмом прижима, который выполнен из двуплечего рычага 3 и цилиндра 14. Подрезка конца иружины в размер осуществляется отрезным механизмом, выставленным предварительно относительно по- тора для обеспечения требуемого раз мера пружины 10 по длине отрезаемого конца. Отрезной механизм вьтолнен в виде качающегося кронштейна I5 с установленным на нем абразивным диском 16, двигателем 17 привода вращения диска 16, клиноременной передачи 1 8 и цилиндра 19 подачи отрезного механизма. В нижней части станины 1 имеется механизм выгрузки, содержащий ползун 20, приводимый в движение цилиндром 21. Механизм выгрузки служит для подачи пружины 10 на транспортер 22, который передает ее на дальнейшую обработку. Привод поворота ротора осуществляется меха- iffl3MOM, имеющим привод от цилиндра 23.
Полуавтомат для динамических испытаний пружин кручения и подрезки их концов работает следующим образом.
Пружина на- позиции загрузки укладывается на ложемент 3 ротора 2. Ото- пгутые концы пружины 10 попадают соответственно один конец в паз Д шпинделя 5, другой в паз вкладыша 4. При этом конец пружины, находящийся в пазу вкладыша 4 у оказывается закрепленным неподвижно, а конец пружины, находящейся в пазу Д шпинделя 5, может поворачиваться вместе со щпинделем 5 на определенный угол при динамическом испытании (угол задается характеристикой пружины, указанной в чертеже пружины). Механиз
MOM поворота ротора, имеющим привод от цилиндра 23, ротор 2 поворачивается. При этом пружина 10, находящаяся на позиции загрузки, попадает на позиций динамического испытания, на которой скалка 11 при помощи цилиндра 12 механизма фиксации проходит через вкладыш 4 ротора 2, внутренний диаметр пружины 10 входит в центральное отверстие Е шпинделя 5 фиксируя при этом ротор 2 и пружину 10. Затем срабатывает гидроцилиндр 8 и захват 9, укрепленный на штоке, воздействует на палец 7 рычага 6, установленного шпинделем 5. При этом шпиндель 5 с укрепленным в его пазу концом пружины 10 поворачивается на заданный угол. Затем цилиндр возвращается в исходное положение, разгружая пружину и цикл на- гружения повторяется по заданной программе необходимое число раз. Одновременно с динамическим испытанием другая пружина поступает на позицию подрезки ее конца в размер, где двуплечий рычаг 13, связанный со штоком цилиндра 14, прижимает пружину 10 на ложементе 3 ротора 2. При этом пружина 10 оказывается надежно зафиксированной на позиции подрезки. Далее при помощи гидроцилиндра 19 постоянно вращающийся отрезной диск 16, закрепленный на кронштейне 15, вместе с приводом подается на подрезаемый конец пружины. Обрезки и шлам удаляются через специальное устройство. Попадая на пятую от загрузки позицию, пружина выталкивается на транспортер 22 при помощи ползуна 20 приводимого от цилиндра 21. Операции загрузки, динамического испытания, подрезки конца пружины в размер и
выгрузку производят ротором 2 с равномерно расположенными неподвижно закрепленными ложементами одновременно и непрерывно на всех этих позициях.
Формула изобретения1 . Полуавтомат для инпмических
испытаний пружин кручения и подрезки их концов, содержащий станину и закрепленные на ней механизм динамических испытаний и механизм для фиксации пружин, отличающийся тем, что, с целью повышения производительности путем совмещения операций динамических испытаний и подрезки конца пружины кручения в размер, в него введены механизм фиксапии ротора, закрепленный на станине п выполненный в виде скалки с приводом, и установленный на станине ротор,,на котором закреплен механизм для фиксации пружин, выполненный в виде шпинделей,
вкладышей и размещенных на роторе . по периметру ложементов, причем шпиндели и вкладьшти установлены соосно ложементам, каждый шпиндель имеет с противоположной стороны от вкладыша
рычаг с пальцем, посредством которого шпиндель связан с механизмом динамического испытания, а ложементы установлены на роторе с возможностью последовательного взаимодействия с механизмами динамического испытания, с отрезным механизмом и с механизмом выгрузки.
и шпиндели выполнены с пазами и центральными отверстиями для установки пружин.
Фие. 1
М
Budf
в
Фиг. 2
Фие.Ч
| Батанов М.В., Петров Н.В | |||
| Пружины | |||
| Л.: Машиностроение, 1968, с.124, рис.43. |
