
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство "новокомак | 1986 |
|
SU1360980A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Правильно-растяжная машина | 1975 |
|
SU566657A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ СТОМАТОЛОГИЧЕСКИХ ИЛИ ХИРУРГИЧЕСКИХ ЦЕЛЕЙ | 2006 |
|
RU2372874C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Схват | 1982 |
|
SU1060469A1 |
| Захватное устройство | 1986 |
|
SU1305032A1 |
| Устройство для правки горячего проката растяжением | 1975 |
|
SU570428A1 |
Изобретение относится к робототехнике. Цель изобретения - упрощение конструкции захватного устройства. Захватное устройство содержит корпус 1, с шарнирно установленными на нем зажимными губками 2. Внутри корпуса 1 на подшипнике 3 размещен полый вал 4, соединенный с двигателем вращения 5. Полый вал 4 снабжен по крайней мере двумя патрубками 7, полости которых сообщены с полостью вала 4. В патрубках 7 размещены с возможностью перемещения вдоль них грузы 13, связанные с размещенным в полом валу 4 толкателем 8 через гибкие элементы 14. При включении двигателя 5 полый вал 4 с патрубками 7 передает вращение грузам 13. Грузы 13 под действием центробежных сил перемещаются вдоль патрубков 7 и через гибкие элементы 14 перемещают толкатель 8, сжимающий пружину 12, который тянет шарнирное соединение с губками 2. Это приводит к закрытию губок. Усилие зажима плавно регулируется скоростью вращения грузов за счет изменения числа оборотов двигателя. 2 з.п. ф-лы, 3 ил.
;
Р
to
Фие1
31495
ре двумя патрубками 7, полости которых сообщены с полостью вала 4. В патрубках 7 размещены с возможностью перемещения вдоль них грузы 13, связанные с размешенным в полом валу 4 толкателем 8 через гибкие элементы 14. При включении двигателя 5 полый вал 4 с патрубками 7 передает вращение грузам 13. Грузы 13 под действием центИзобретение относится к робототехнике, а точнее к захватным устройствам промышленных роботов.
Цель изобретения - упрощение конструкции захватного устройства.
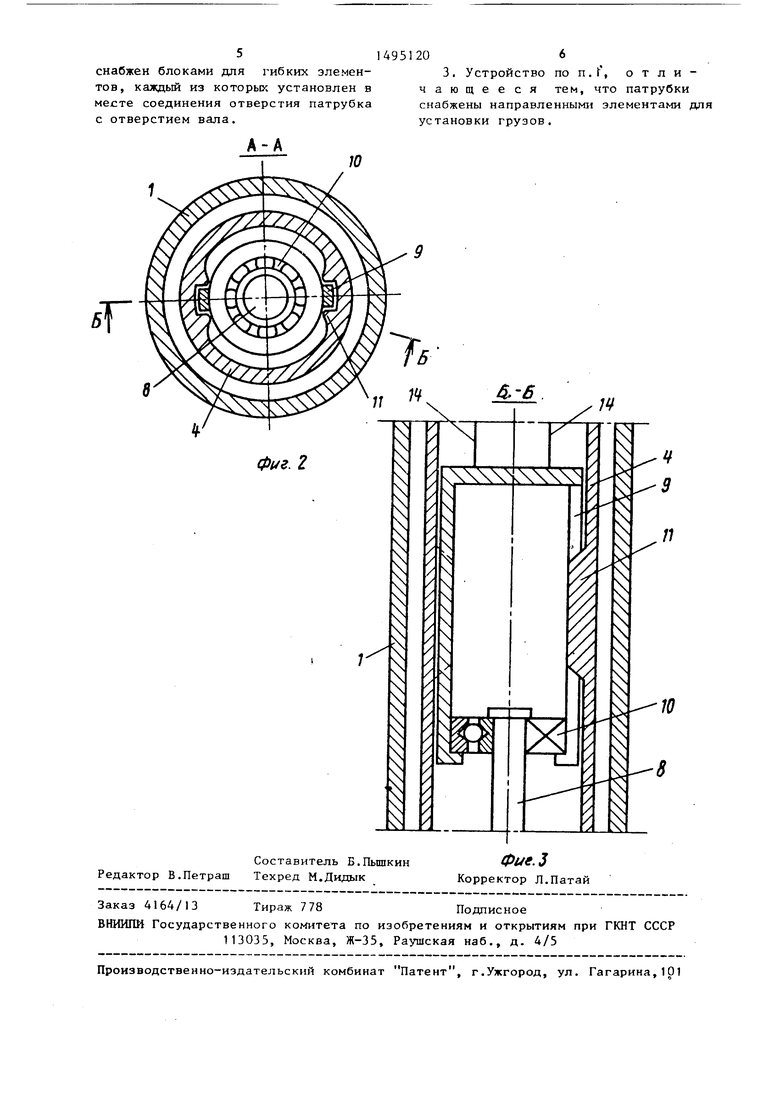
На фи1 .1 изображено устройство, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - разрез Б-Б на фиг.2 Захватное устройство содержит корпус 1 с шарнирно установленными на нем зажимными губками 2. Внутри кор- пуса 1 на подшипнике 3 размещен полый вал 4, соединенный с двигателем 5 вращения через тормозную муфту 6. Полый вал 4 снабжен по крайней мере двумя патрубками 7, расположенными пер- пендикулярно его оси, полости которых сообщены с полостью вала 4. В полом валу 4 подвижно установлен толкатель 8,- снабженный ребрами 9 с возмолсность вращения их вокруг его оси с помощью подшипника 10, размещенными в направляющих элементах 11 полого вала 4 с возможностью возвратно-поступательного перемещения. Толкатель 8 через ребра 9 подпружинен пружиной 12 и шарнирно соединен с губками 2. Б патрубках 7 размещены с возможностью перемещения вдоль них грузы 13, связанные с толкателем 8 через гибкие эле- менть, например гибкие элементы 14, и ребра 9. На внутренней поверхности полого вала 4, в местах его сообщения с патрубками 7, установлены блоки 15 дпя гибких элементов 14. Ребра 9 же- стко соединены с наружным кольцом подшипника 10, а толкатель 8 - с внутренним кольцом подшипника 10.
Устройство работает следующим образом.
Двигатель 5 приводит во вращение через тормозную муфту 6 полый вал 4 с патрубками 7, которые передают вращение грузам 13. Иод действием центробежных сил грузы 13 перемещаются
120
робежных сил перемещаются вдоль патрубков 7 и через гибкие элементы 14 перемещают толкатель 8, сжимающий
г пружину 12, который тянет шарнирное соединение с губками 2. Это приводит к закрытию губок. Усилие зажима плавно регулируется скоростью вращения грузов за счет изменения числа оборо10 тов двигателя. 2 з.п, ф-лы, 3 ил.
0 0
0
5
от оси полого вала 4 к периферии патрубков 7 и через гибкие элементы 14, проходящие по блокам 15, перемещают толкатель 8 с вращающимися вокруг его оси на подшипнике 10 ребрами 9, перемещающимися в направляющих 11 полого вала 4. Толкатель 8 через ребра 9 сжимает пружину 12 и тянет шарнирное соединение с губками 2. Это приводит к закрытию зажимных губок 2. Усилие зажима зависит от величины центробежной силы, действующей на грузы, которая, в свою очередь, зависит от скорости вращения грузов.
Формула изобретения
снабжен блоками для гибких элементов, каждый из которых установлен в месте соединения отверстия патрубка с отверстием вала.
Фиг. 2
V 9
11
| Захватное устройство "новокомак | 1986 |
|
SU1360980A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
