Изобретение относится к робототехнике, а именно к захватным устройствам промышленных роботов.
Двигатель 4 приводит во вращение через тормозную муфту 5 полый вал 3, который передает вращение грузам 7. Под действием центробежной силы грузы 7
Целью изобретения является повыще-- отклоняются от оси толкателя 6 и через соединение рейка 8 - сектор 9 перемещают толкатель 6 в полом валу 3. Толкатель 6 сжимает пружину 11 и тянет ползун 13, соединенный с механизмом 15 зажима. Это приводит к закрытию зажимных губок 17.
Захватное устройство содержит корпус 1, Ю усилие зажима зависит от величины цент- внутренняя полость которого выполнена в ви-робежной силы, действующей на грузы, которая, в свою очередь, зависит от скорости вращения грузов. Таким образом усилие зажима плавно регулируется скоростью вра- вал 3, соединенный с двигателем 4 через тор- . щения грузов за счет изменения числа мозную муфту 5. По оси полого вала 3 под- оборотов двигателя.
ние надежности путем регулирования усилия зажима.
На чертеже изображено предлагаемое устройство, разрез.
де тела вращения конусоидальной формы. Внутри корпуса 1 на подщипниках 2 размещен с возможностью вращения полый
вижно установлен толкатель 6, связанный с грузами 7 при помощи зубчатого соединения рейка 8 - сектор 9. Зубчатая рейка 8 выполнена на поверхности толкателя 6, а
Формула изобретения
Захватное устройство, содержащее кор- зубчатые секторы 9 соединены с грузами. 20 пус, на котором щарнирно установлены Грузы 7 с секторами 9 крепятся в поломзажимные губки с зубчатыми секторами,
валу 3 при помощи пальцев 10, при этомнаходящимися в зацеплении с рейкой, усгрузы 7 имеют возможность вращения отно- тановленной на ползуне, связанном с приво- сительно пальцев 10. Толкатель 6 одним дом, отличающееся тем, что, с целью повы- своим концом упирается в пружину 11,щения надежности работы путем регулиро,.a...o,,,ui.w , nanw ч Q глс, ипл,гг..л О взния усилия зажима, оно снабжено толкателем с зубчатой рейкой, установленным в корпусе с возможностью вращения полым валом, в полости которого размещен толкатель, а также грузы, жестко закрепленразмещенную в полом валу 3, а на другом его конце при помощи упорного подщипни- ка 12 закреплен ползун 13. Ползун 13 размещен с возможностью перемещения в установленном соосно с корпусом 1 наружном
стакане 14 и соединен с механизмом 15 за- ные на зубчатых секторах, шарнирно устажима. Для предотвращения прокручивания ползуна 13 относительно наружного стакана 14 в последнем выполнена направляющая 16. Механизм 15 зажима кинематически связан с зажимными губками 17.
Захватное устройство работает следующим образом.
новленных в полом валу и находящихся в зацеплении с зубчатой рейкой толкателя, кроме того, в корпусе выполнены направляющие, в которых с возможностью возвратно-поступательного перемещения разме- 35 щен ползун, кинематически связанный с толкателем, подпружиненным относительно полого вала, связанного с приводом.
Составитель А. Алексеев Техред.И. ВересКорректор И. Муска
Тираж 952Подписное
ВНИИПИ Государственного комитета СССР по делам нзобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Формула изобретения
новленных в полом валу и находящихся в зацеплении с зубчатой рейкой толкателя, кроме того, в корпусе выполнены направляющие, в которых с возможностью возвратно-поступательного перемещения разме- 35 щен ползун, кинематически связанный с толкателем, подпружиненным относительно полого вала, связанного с приводом.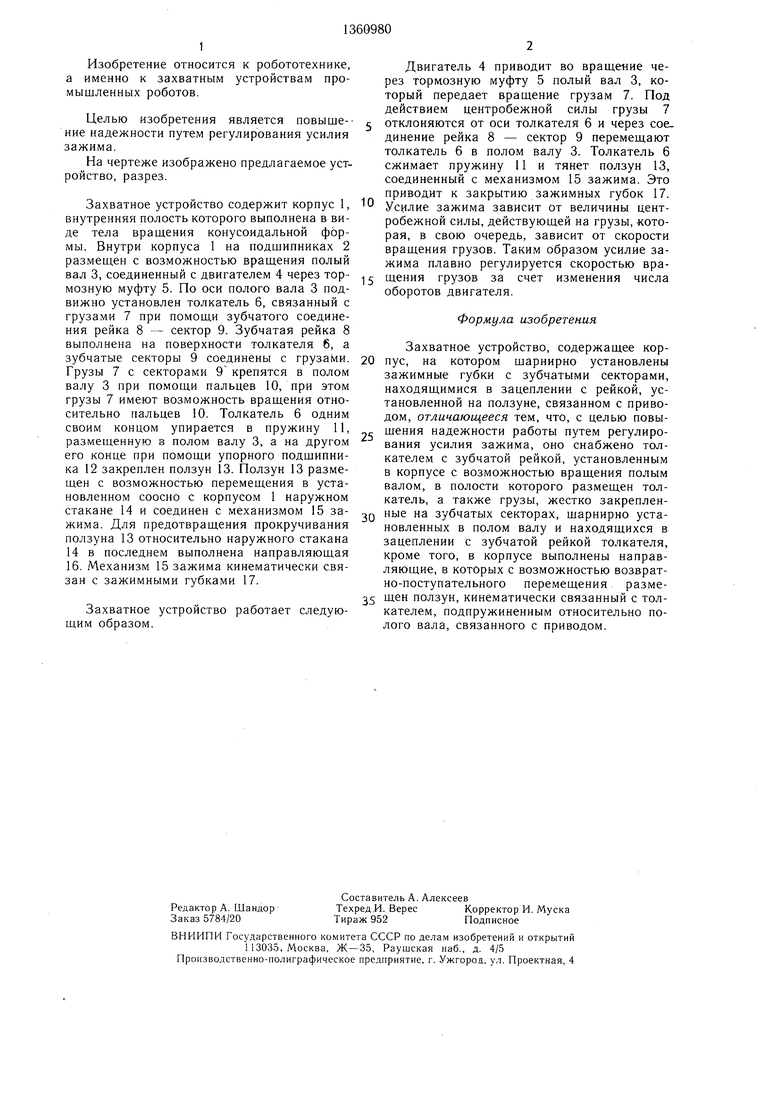
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство "Новокомак-Б | 1987 |
|
SU1495120A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство | 1989 |
|
SU1785892A1 |
| Захватное устройство | 1983 |
|
SU1189675A1 |
| Устройство для правки горячего проката растяжением | 1975 |
|
SU570428A1 |
| Захват манипулятора | 1979 |
|
SU837855A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захватное устройство | 1986 |
|
SU1449340A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
Изобретение относится к робототехнике, а именно к захватным устройствам промышленных роботов. Целью изобретения является повышение надежности путем регулирования усилия зажима. Двигатель 4 приводит во вращение полый вал 3, который передает вращение грузам 7. Под действием центробежной силы грузы 7 отклоняются от оси толкателя 6 и через соединение рейка 8 - сектор 9 перемещают толкатель 6 в полом валу 3. Толкатель 6 сжимает пружину 11 и перемещает ползун 13, соединенный с механизмом зажима 15. Это приводит к закрытию зажимных губок 17. Усилие зажима зависит от величины центробежной силы, зависящей от скорости вращения полого вала 3. 1 ил. (Л со ОГ) о СО 00
| Захватное устройство | 1975 |
|
SU522051A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
