t. . 1305032 жением втулки 11 производится фиксация поворотного звена 3 в рабочем положении. При дальнейшем движении втулки копирные поверхности втулки
1
Изобретение относится к грузозахватным устройствам и может быть использовано в механизмах для фиксации изделий, в частности для фиксации формы в процессе распалубки при производстве железобетонных центрифугированных стоек опор воздушных линий электропередачи.
Цель изобретения - упрощение конструкции.
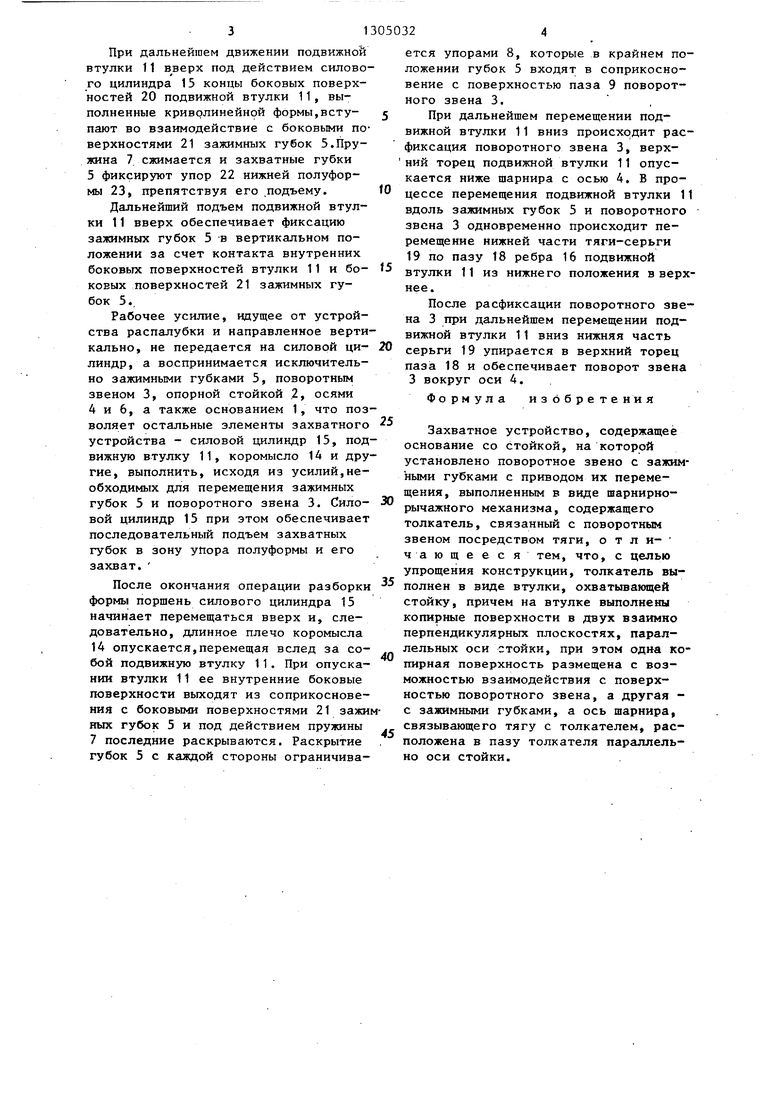
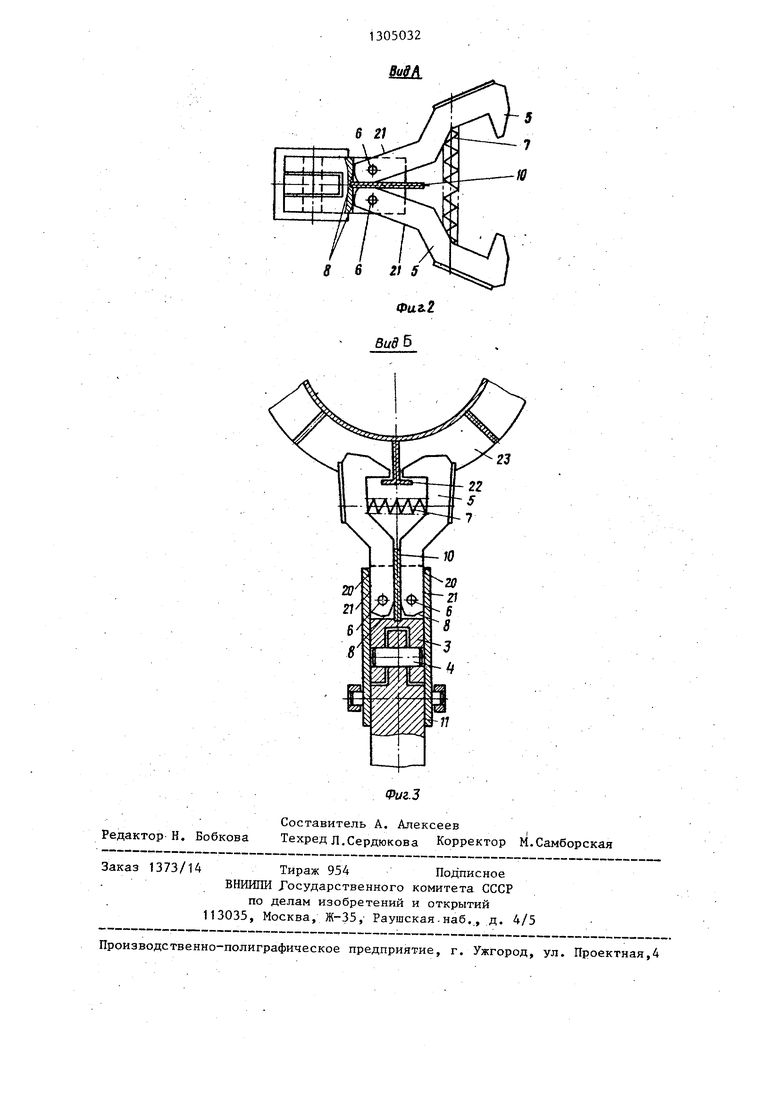
tia фиг.1 изображено захватное устройство в момент разжима в горизонтальном положении, вид сбокуiна фиг.2 -.вид А на фиг. 1; на фиг.З - вид Б на фиг.1 (в момент захвата в вертикальном положении).
Захватное устройство содержит основание 1, опорную стойку 2 и поворотное звено 3, шарнирно соединенные между собой при помощи оси 4. Поворотное звено 3 на конце снабжено двумя зажимными губками 5, шарнирно соединенными посредством осей 6. С целью ограничения хода зажимных губок 5 при раскрытии под действием пружины 7 они снабжены упорами 8, взаимодействующими с внутренней поверхностью паза 9 поворотного звена 3. Для обеспечения симметричного расположения зажимных губок 5 относительно продольной оси поворотного звена 3 оно снабжено упором 10, служащим ограничителем поворота зажимных губок 5 при захвате изделия.
На опорной стойке 2 с возможностью возвратно-поступательного перемещения установлена втулка 11, которая снабжена полуосями 12, входящими в пазы 13 коромысла 14, гпарнирно закреплен- н ого на основании 1.
На втором конце коромысла шарнирно закреплен шток силового цилиндра 15, корпус которого подвижно соединен с основанием 1.
На подвижной втулке 11 выполнено ребро 16, снабженное копирной поверхвзаимодействуют с- боковыми поверхностями зажимных губок 5. Дальнейший подъем подвижной втулки обеспечивает фиксацию зажимных губок 5. 3 ил.
5
0
5
0
5
0
5
ностью 17, взаимодействующей с боковой поверхностью поворотного звена 3 и плавно переходящей в копирную поверхность втулки 11. Ребро 16 снабжено пазом 18, с которым взаимодействует тяга - серьга 19, шарнирно закрепленная в упоре 10 поворотного звена 3.
Верхние торцы боковых поверхностей подвижной втулки 11 также выполнены в .виде симметричных зеркально расположенных криволинейных поверхностей 20, взаимодействующих с боковыми поверхностями 21 зажимных бок 5. В закрытом положении зажимными губками 5 фиксируется упор 22 нижней полуформы 23.
Захватное устройство работает следующим образом.
После перемещения формы в зону действия захватного устройства происходит перемещение поршня силового цилиндра 15 вниз, при этом длинное плечо коромысла 14 начинает подниматься вверх, поверхностью пазов 13 воздействуя на полуоси 12 подвижной втулки 11. При подъеме подвижной втулки 11 вверх ребро 16 своей копирной поверхностью 17 входит в соприкосновение с торцовой поверхностью поворотного звена 2 и, перекатываясь по ней, обеспечивает подъем поворотного звена 3 в вертикальное положение вокруг оси 4. При дальнейшем движении подвижной втулки 11 вверх производится фиксация поворотного звена 3 внутренними поверхностями подвижной втулки 11 в вертикальном положении.
За эту часть хода поршня силового цилиндра 15 зажимные губки 5 в открытом состоянии под действием пружины 7 перемещаются из горизонтального положения (фиг.1) в вертикальное и располагаются в зоне упора 22 нижней полу- формы 23.
При дальнейшем движении подвижной втулки 11 вверх под действием силового цилиндра 15 концы боковых поверхностей 20 подвижной втулки 11, выполненные криволинейной формы,вступают во взаимодействие с боковыми поверхностями 21 зажимных губок 5.Пружина 7. сжимается и захватные губки 5 фиксируют упор 22 нижней полуформы 23, препятствуя его .подъему.
Дальнейший подъем подвижной втулки 11 вверх обеспечивает фиксацию зажимных губок 5 в вертикальном положении за счет контакта внутренних боковых поверхностей втулки 11 и боковых поверхностей 21 зажимных губок 5.
Рабочее усилие, идущее от устройства распалубки и направленное вертиПосле расфиксации поворотного зве на 3 при дальнейшем перемещении подвижной втулки 11 вниз нижняя часть
кально, не передается на силовой ци- 20 серьги 19 упирается в верхний торец
линдр, а воспринимается исключительно зажимньми губками 5, поворотным звеном 3, опорной стойкой 2, осями А и 6, а также основанием 1, что позволяет остальные элементы захватного устройства - силовой цилиндр 15, подвижную втулку 11, коромысло 1А и другие, выполнить, исходя из усилий,необходимых для перемещения зажимных губок 5 и поворотного звена 3. Силовой цилиндр 15 при этом обеспечивает последовательный подъем захватных губок в зону уйора полуформы и его захват.
После окончания операции разборки формы поршень силового цилиндра 15 начинает перемещаться вверх и, следовательно, длинное плечо коромысла 14 опускается,перемещая вслед за собой подвижную втулку 11. При опускании втулки 11 ее внутренние боковые поверхности выходят из соприкосновения с боковыми поверхностями 21 зажиных губок 5 и под действием пружины 7 последние раскрываются. Раскрытие губок 5 с каждой стороны ограничива
ется упорами 8, которые в крайнем положении губок 5 входят в соприкосновение с поверхностью паза 9 поворотного звена 3.
При дальнейшем перемещении подвижной втулки 11 вниз происходит рас- фиксация поворотного звена 3, верхний торец подвижной втулки 11 опускается ниже шарнира с осью 4. В процессе перемещения подвижной втулки 11 вдоль зажимных губок 5 и поворотного звена 3 одновременно происходит перемещение нижней части тяги-серьги 19 по пазу 18 ребра 16 подвижной втулки 11 из нижнего положения в верхнее.
После расфиксации поворотного звена 3 при дальнейшем перемещении подвижной втулки 11 вниз нижняя часть
серьги 19 упирается в верхний торец
0
5
0
5
паза 18 и обеспечивает поворот звена 3 вокруг оси 4.
Формула изобретения
Захватное устройство, содержащее основание со стойкой, на которой установлено поворотное звено с зажимными губками с приводом их перемещения, выполненным в виде шарнирно- рычажного механизма, содержащего толкатель, связанный с поворотным звеном посредством тяги, о т л и- чающе е с я тем, что, с целью упрощения конструкции, толкатель выполнен в виде втулки, охватьшающей стойку, причем на втулке выполнены копирные поверхности в двух взаимно перпендикулярных плоскостях, параллельных оси стойки, при этом одна кс- пирная поверхность размещена с возможностью взаимодействия с поверхностью поворотного звена, а другая - с зажимными губками, а ось шарнира, связывающего тягу с толкателем, расположена в пазу толкателя параллельно оси стойки.
Редактор Н. Бобкова
Фиг-З
Составитель А. Алексеев
(
Техред Л.Сердюкова Корректор М.Самборская
Заказ 1373/14 Тираж 954 Подписное ВНИИПИ / осударственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская, наб,., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4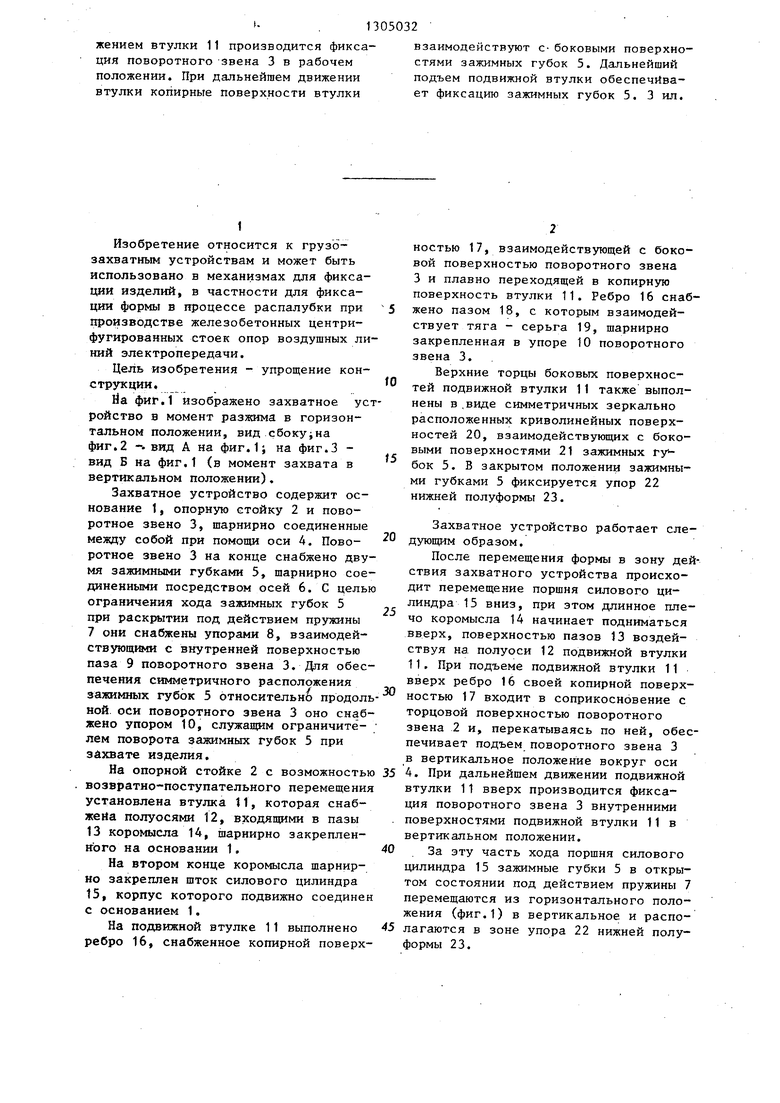
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захватное устройство | 1986 |
|
SU1315301A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Захватное устройство | 1987 |
|
SU1437218A2 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Экструзионно-выдувная машина для изготовления полых изделий из полимерного материала | 1988 |
|
SU1682198A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
Изобретение относится к грузозахватным устройствам и может быть использовано в механизмах фиксации изделий. Целью изобретения является упрощение конструкции. При перемещений поршня силового цилиндра 15 вниз подвижная втулка 11 поднимается вверх, ребро 16 своей копирной поверхностью 17 воздействует на поворотное звено 3 и поднимает его. Дальнейшим дви(Л С 00 о СП О со ГС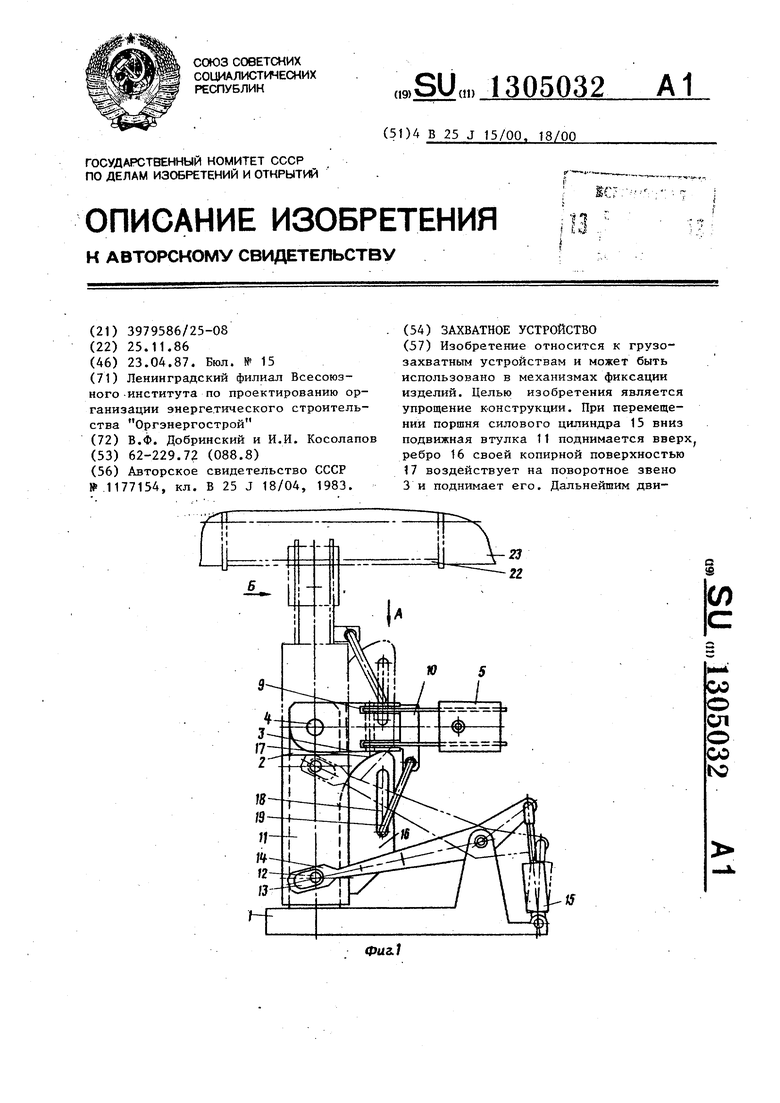
| Рука промышленного робота | 1983 |
|
SU1177154A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
