(Л
12
;о
СП
to ел
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ ПОДДОН | 1990 |
|
SU1835750A1 |
| Захватное устройство для изделий с центральным отверстием | 1985 |
|
SU1606429A1 |
| Крановый вилочный захват | 1978 |
|
SU779256A1 |
| Рабочее оборудование бордюроукладчика | 1988 |
|
SU1585425A1 |
| КРАНОВЫЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1966 |
|
SU180778A1 |
| Устройство для кантования и переноски грузов с центральным отверстием | 1975 |
|
SU527363A1 |
| Захватное устройство | 1986 |
|
SU1384519A1 |
| Захват для штучных грузов | 1975 |
|
SU621636A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
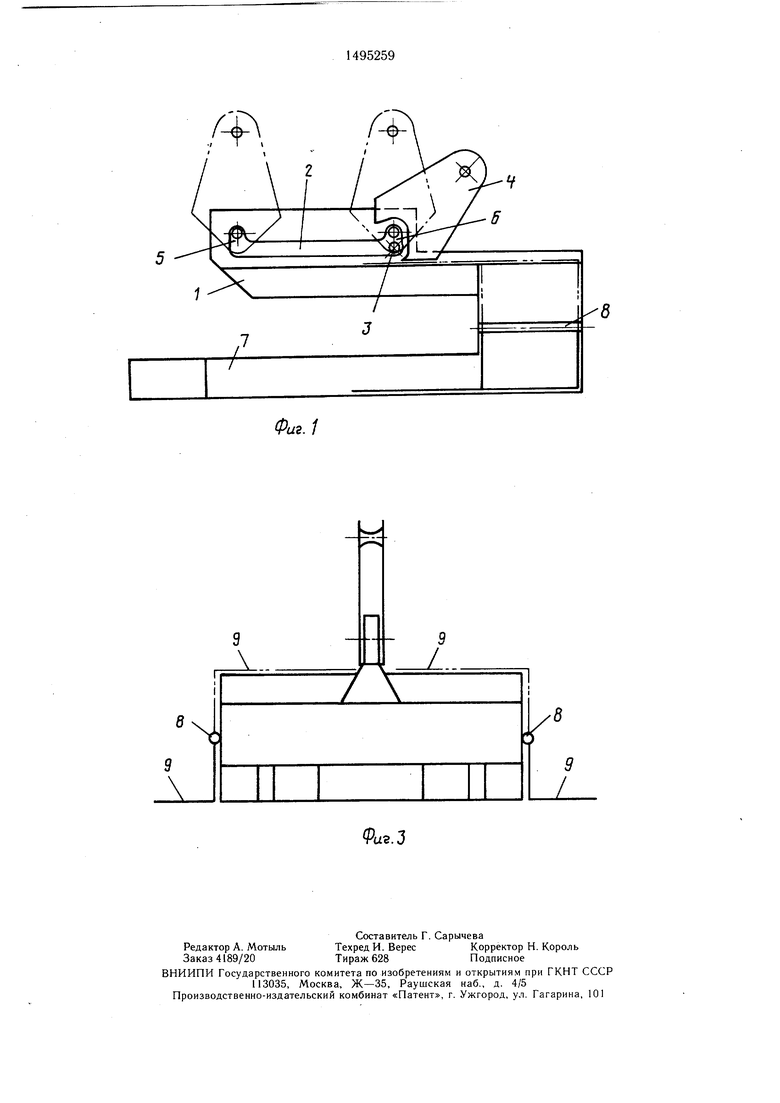
Изобретение относится к грузоподъемным устройствам для грузов любой формы с центральным отверстием с плоскими гранями, например прямоугольной, квадратной, многоугольной. Целью изобретения является расширение технологических возможностей захвата путем увеличения диапазона захватываемых грузов с центральным отверстием. Вилочный захват содержит скобу 1 с грузовой подвеской, вилы 7, два Г-образных откидных ограничителя 9 с наклонными поверхностями, пазами вдоль них и регулируемыми упорами с фиксаторами, причем две противоположные наклонные внутренние поверхности ограничителей образуют конус, обращенный основанием в сторону груза, а рабочие плоскости упоров расположены к ним под углом α *98 90° и пЕРпЕНдиКуляРНО ВилАМ. 1 з.п. ф-лы, 3 ил.
Фие.г
Изобретение относится к грузоподъемным устройствам для грузов любой формы с центральным отверстием с плоскими торцовыми, и боковыми гранями.
Цель изобретения - расширение технологических возможностей путем увеличения диапазона захватываемых грузов с центральным отверстием.
На фиг. 1 показан вилочный захват, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид спереди.
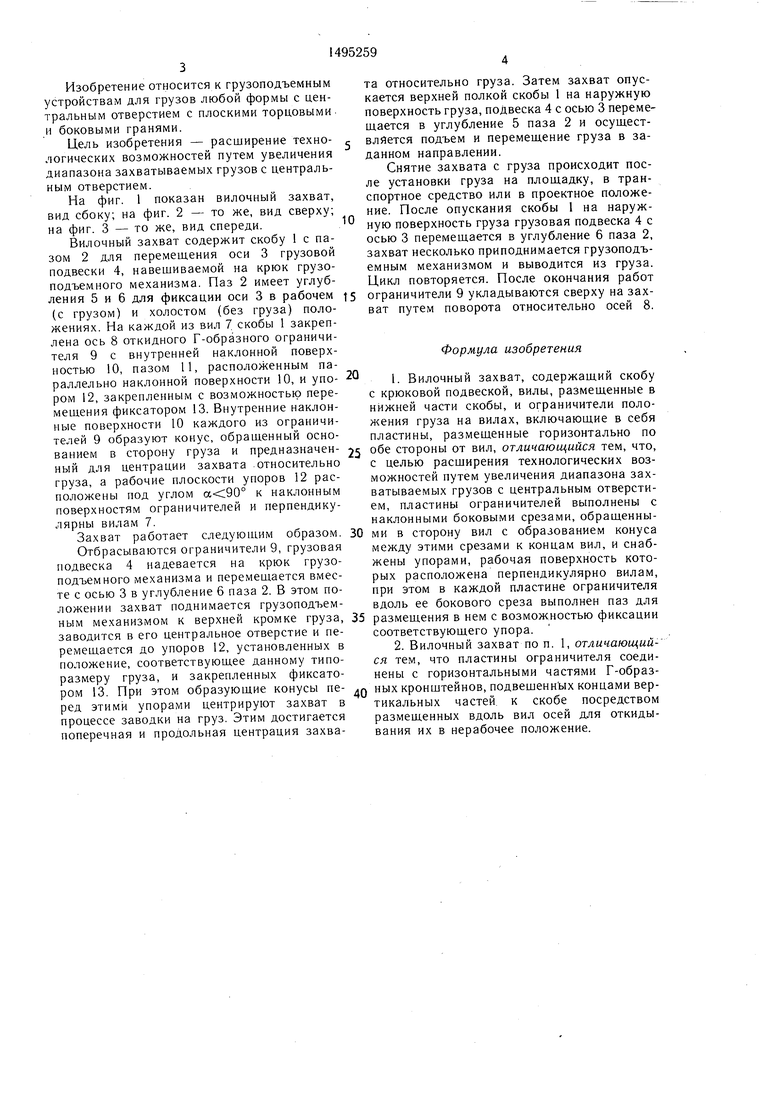
Вилочный захват содержит скобу 1 с пазом 2 для перемещения оси 3 грузовой подвески 4, навешиваемой на крюк грузо10
та относительно груза. Затем захват опускается верхней полкой скобы 1 на наружную поверхность груза, подвеска 4 с осью 3 перемешается в углубление 5 паза 2 и осуществляется подъем и перемещение груза в заданном направлении.
Снятие захвата с груза происходит после установки груза на площадку, в транспортное средство или в проектное положение. После опускания скобы 1 на наружную поверхность груза грузовая подвеска 4 с осью 3 перемещается в углубление 6 паза 2, захват несколько приподнимается грузоподъемным механизмом и выводится из груза. Цикл повторяется. После окончания работ
подъемного механизма. Паз 2 имеет углуб
ления 5 и 6 для фиксации оси 3 в рабочем |5 ограничители 9 укладываются сверху на зах- (с грузом) и холостом (без груза) поло- ват путем поворота относительно осей 8. жениях. На каждой из вил 7 скобы 1 закреплена ось 8 откидного Г-образного ограничителя 9 с внутренней наклонной поверхностью 10, пазом 11, расположенным параллельно наклонной поверхности 10, и упо- 20 ром 12, закрепленным с возможностью перемещения фиксатором 13. Внутренние наклонные поверхности 10 каждого из ограничителей 9 образуют конус, обращенный основанием в сторону груза и предназначен- 25 обе стороны от вил, отличающийся тем, что, ный для центрации захвата -относительно с целью расширения технологических возможностей путем увеличения диапазона захватываемых грузов с центральным отверстием, пластины ограничителей выполнены с наклонными боковыми срезами, обращенныФормула изобретения
I. Вилочный захват, содержащий скобу с крюковой подвеской, вилы, размещенные в нижней части скобы, и ограничители положения груза на вилах, включающие в себя пластины, размещенные горизонтально по
груза, а рабочие плоскости упоров 12 расположены под углом к наклонным поверхностям ограничителей и перпендикулярны вилам 7.
Захват работает следующим образом. 30 ми в сторону вил с образованием конуса
Отбрасываются ограничители 9, грузовая подвеска 4 надевается на крюк грузоподъемного механизма и перемещается вместе с осью 3 в углубление 6 паза 2. В этом положении захват поднимается грузоподъеммежду этими срезами к концам вил, и снабжены упорами, рабочая поверхность которых расположена перпендикулярно вилам, при этом в каждой пластине ограничителя вдоль ее бокового среза выполнен паз для ньш механизмом к верхней кромке груза, 35 размещения в нем с возможностью фиксации заводится в его центральное отверстие и пе- соответствующего упора, ремещается до упоров 12, установленных в2. Вилочный захват по п. , отличающийположение, соответствующее данному типо- ся тем, что пластины ограничителя соеди- размеру груза, и закрепленных фиксато- нены с горизонтальными частями Г-образ- ром 13. При этом образующие конусы пе- Q ных кронштейнов, подвешенн ых концами вер- ред этими упорами центрируют захват в тикальных частей к скобе посредством процессе заводки на груз. Этим достигается размещенных вдоль вил осей для откиды- поперечная и продольная центрация захва- вания их в нерабочее положение.
та относительно груза. Затем захват опускается верхней полкой скобы 1 на наружную поверхность груза, подвеска 4 с осью 3 перемешается в углубление 5 паза 2 и осуществляется подъем и перемещение груза в заданном направлении.
Снятие захвата с груза происходит после установки груза на площадку, в транспортное средство или в проектное положение. После опускания скобы 1 на наружную поверхность груза грузовая подвеска 4 с осью 3 перемещается в углубление 6 паза 2, захват несколько приподнимается грузоподъемным механизмом и выводится из груза. Цикл повторяется. После окончания работ
ограничители 9 укладываются сверху на зах- ват путем поворота относительно осей 8. обе стороны от вил, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения диапазона захватываемых грузов с центральным отверстием, пластины ограничителей выполнены с наклонными боковыми срезами, обращенныограничители 9 укладываются сверху на зах- ват путем поворота относительно осей 8. обе стороны от вил, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения диапазона захватываемых грузов с центральным отверстием, пластины ограничителей выполнены с наклонными боковыми срезами, обращенныФормула изобретения
I. Вилочный захват, содержащий скобу с крюковой подвеской, вилы, размещенные в нижней части скобы, и ограничители положения груза на вилах, включающие в себя пластины, размещенные горизонтально по
Фаг.1
| Крановый вилочный захват | 1976 |
|
SU629160A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
