Изобретение -относится к устройствам контроля курса движения и может быть использовано при контроле подъезда движущегося транспортного средства по отношению к стоящему транспортному средству для проведения перегрузочных операций с одного транспортного средства на другое
Цель изобретения - повьшение надежности работы устройствао
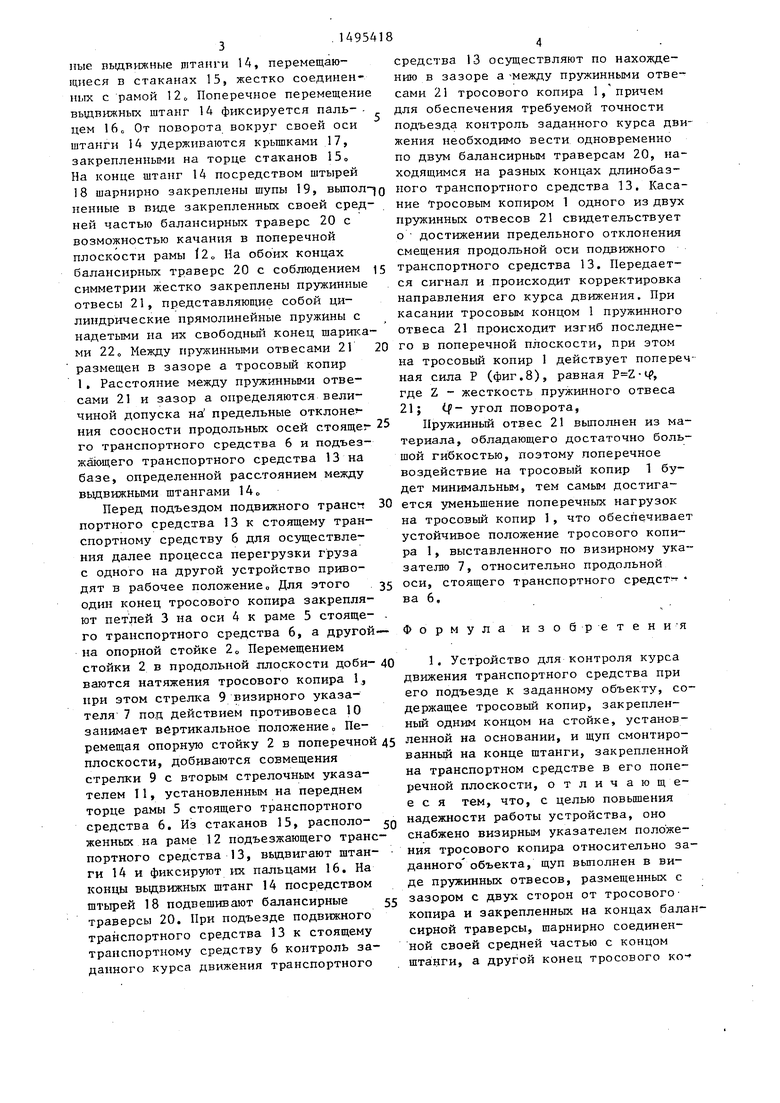
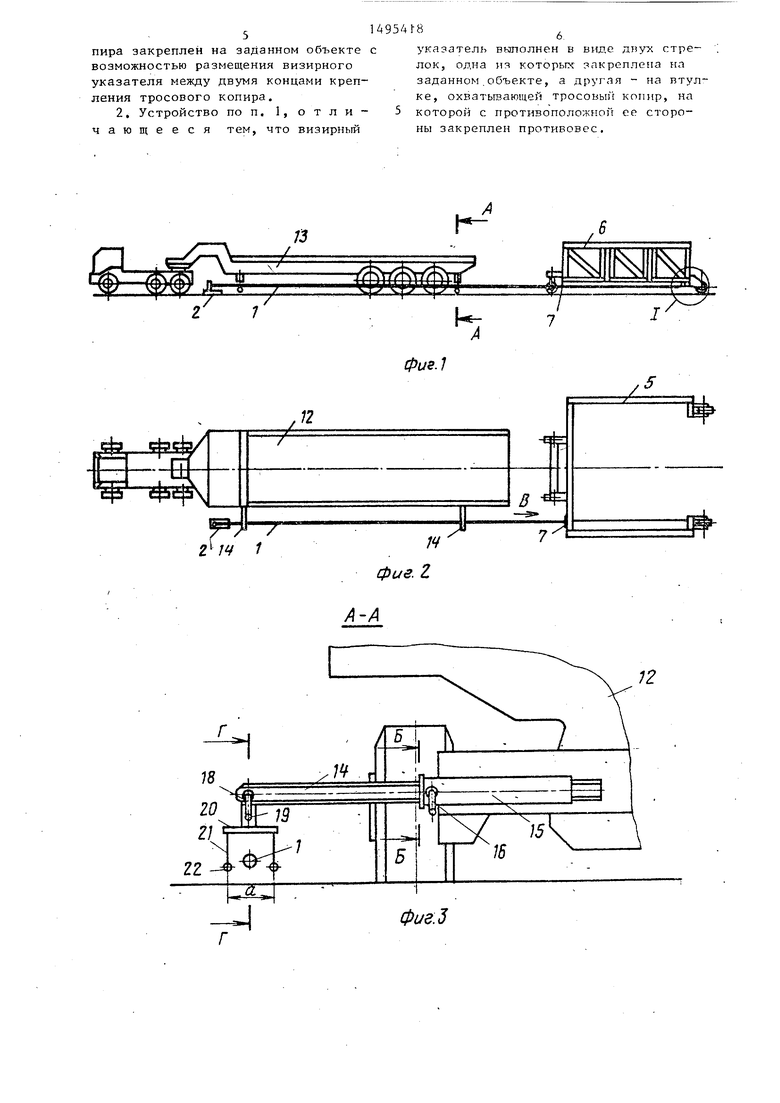
На фиг.1 изображено устройство контроля заданного курса; на - то же, план; на фиг.З - разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - узел I на фиг.1; на фиг.6 вид В на фиг.2; на фиг.7 - разрез Г-Г на фиг.З; на фиг,8 - схема сил, определяющих величину воздействия на тросовый копир.
Устройство содержит тросовый копир 1, закрепленньй одним концом на опорной стойке 2, а другим концом, снабженным петлей 3, соединен с осью 4, закрепленной на заднем конце рамы 5, стоящего транспортного средства 6. В средней части тросового копира 1 находится визирный указатель 7 в в виде втулки 8 с закрепленной на ней стрелой 9, которая охватывает тросовый копир и имеет возможность вращаться относительно него. С другой стороны втулки 8 закреплен противовес 10, который обеспечивает вертикальное положение стрелки 9. На переднем торце рамы 5 стоящего транспортного средства 6 находится второй стрелочный указатель.11 визирного указателя 7, установленный таким образом, что тросовый копир 1 в натянутом положении одним концом закрепленный за ось 4, а другим - за опорную стойку 2, при совмещении стрелки 9 с вторым стрелочным указателем 1 образует прямую, параллельную продольной оси рамы 5 стоящего транспортного средства 6 На переднем, и заднем концах рамы 12 подъезжающего транспортного средства 3 размещены попереч- .
4
СО ел
оо
иые. пыдвютные Д1танги 14, перемещающиеся в стаканах 15, жестко соединенных с рамой 12,, Поперечное перемещени выдвижных штанг 14 фиксируется пальцем 16о От поворота вокруг своей оси штанги 14 удерживаются крьшками 17, закрепленными на торце стаканов 15 На конце штанг 14 посредством штырей 18 шарнирно закреплены шупы 19, ВЫПОЛ ненные в виде закрепленных своей средней частью балансирньгх траверс 20 с возможностью качания в поперечной плоскости рамы 12„ На обоих концах балансирных траверс 20 с соблюдением симметрии жестко закреплены пружинные отвесы 21, представляющие собой цилиндрические прямолинейные пружины с надетыми на их свободньш конец шариками 22о Между пружинными отвесами 21 размещен в зазоре а тросовьй копир 1. Расстояние между пружинными отвесами 21 и зазор а определяются величиной допуска на предельные oтклoнe ния соосности продольных осей стоящег го транспортного средства 6 и подъез- жакицего транспортного средства 13 на базе, определенной расстоянием между выдвижными штангами 14
Перед подъездом подвижного трансп портного средства 13 к стоящему транспортному средству 6 для осуществления далее процесса перегрузки груза с одного на другой устройство приводят в рабочее положение Для этого один конец тросового копира закрепляют петлей 3 на оси 4 к раме 5 стояще- го транспортного средства 6, а другой на опорной стойке 2 Перемещением стойки 2 в продольной плоскости доби- ваются натяжения тросового копира 1,, при этом стрелка 9 визирного указателя 7 под действием противовеса 10 занимает вертикальное положение,, Перемещая опорную стойку 2 в поперечной плоскости, добиваются совмещения стрелки 9 с вторым стрелочным телем I1, установленным на переднем торце рамы 5 стоящего транспортного средства 6. Из стаканов 15, располо- женных на раме 12 подъезжающего транспортного средства 13, выдвигают штан- ги 14 и фиксируютцх пальцами 16. На концы выдвижных штанг 14 посредством штырей 18 подвешивают балансирные траверсы 20. При подъезде подвижного транспортного средства 13 к стоящему транспортному средству 6 контроль заданного курса движения транспортного
средства 13 осуществляют по нахождению в зазоре а-между пружинными отвесами 21 тросового копира 1, причем для обеспечения требуемой точности подъезда контроль заданного курса движения необходимо вести одновременно по двум балансирным траверсам 20, находящимся на разных концах длинобаз- ного транспортного средства 13. Касание Тросовым копиром 1 одного из двух пружинных отвесов 21 свидетельствует о достижении предельного отклонения смещения продольной оси подвижного транспортного средства 13, Передается сигнал и происходит корректировка направления его курса движения. При касании тросовым концом 1 пружинного отвеса 21 происходит изгиб последнего в поперечной плоскости, при этом на тросовый копир 1 действует поперечная сила Р (фиг,8), равная Ч, где Z - жесткость пружинного отвеса 21; -р- угол поворота,
Пружинный отвес 21 вьшолнен из материала, обладающего достаточно большой гибкостью, поэтому поперечное воздействие на тросовый копир 1 будет минимальным, тем самым достигается уменьшение поперечных нагрузок на тросовый копир 1, что обеспечивает устойчивое положение тросового копира 1, выставленного по визирному указателю 7, относительно продольной оси, стоящего транспортного средст ва 6.
Формула изобретени я
1, Устройство для контроля курса движения транспортного средства при его подъезде к заданному объекту, содержащее тросовый копир, закрепленный одним концом на стойке, установленной на основании, и щуп смонтированный на конце штанги, закрепленной на транспортном средстве в его поперечной плоскости, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено визирным указателем положения тросового копира относительно заданного объекта, щуп выполнен в виде пружинных отвесов, размещенных с зазором с двух сторон от тросового- копира и закрепленных на концах балан сирной траверсы, щарнирно соединенной своей средней частью с концом щтанги, а другой конец тросового ко-
пира закреплен на заданном объекте возможностью размещения визирного указателя между двумя концами крепления тросового копира.
2, Устройство по п. 1, отличающееся тем, что визирный
указатель выполнен в виде двух стрелок, одна из которых закреплена на заданном.объекте, а другая - на втулке, охватьгаающей тросовьп копир, на которой с противоположной се стороны закреплен противовес.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения рам транспортных средств | 1987 |
|
SU1500513A1 |
| Транспортное средство для перевозкиКРупНОгАбАРиТНыХ ТяжЕлОВЕСНыХ гРузОВ | 1979 |
|
SU839777A1 |
| Тележка для транспортировки вагонетки | 1983 |
|
SU1114869A1 |
| Устройство для крепления длинномерного груза на транспортном средстве | 1989 |
|
SU1682223A1 |
| МОБИЛЬНЫЙ СТАНОК-КАЧАЛКА | 2011 |
|
RU2479751C1 |
| Каротажная станция | 1989 |
|
SU1712923A1 |
| УСТРОЙСТВО ДЛЯ ПОДКОПА ТРУБОПРОВОДОВ | 1998 |
|
RU2170307C2 |
| СПОСОБ КОНТРОЛЯ ПОЛЗУЧЕСТИ МАТЕРИАЛА ТРУБ ПАРОПЕРЕГРЕВАТЕЛЕЙ КОТЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2029224C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА | 2008 |
|
RU2385236C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
Изобретение относится к устройствам для контроля заданного курса движения транспортного средства по отношению к стоящему транспортному средству. Целью изобретения является повышение надежности устройства в работе. Устройство содержит тросовый копир 1 и щуп 19, выполненный в виде балансирной траверсы 20 с пружинными отвесами 21 на концах. При изменении курса движения транспортного средства и его несоответствии с заданным копир 1 касается отвеса 21, что является сигналом о необходимости корректировки движения. 8 ил.
/- / 1
SSS
I
фие.1
J4
тИв
фие. Z
фиг.З
6-В
ФиеЛ
ВидВ
Ю
20
Фие.6
Фи.В
Фиг. 5
1В
20
Фие.7
| Устройство контроля заданного курса движения дорожно-строительной машины | 1984 |
|
SU1240838A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
