«/
/
tJS. 1
541
:л
о
Л
S
15
ИзоОрстепие относится к.транспортном машююстроснню и касается различного рода соединительных устройств, предназначенных для соедине- ння рам двух транспортных средств.
Цель изобретения - повышение точности сое;шнения и сокращение времени погрузочно-разгрузочпых работ.
На фиг.1 изображено устройство для соединения рам; на фиг.2 - вид А на фиг. Г, на фнг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.2; на фиг.5-разрез Г-Г на фиг.2; на фиг. 6 - разрез Д-Д на фиг.2.
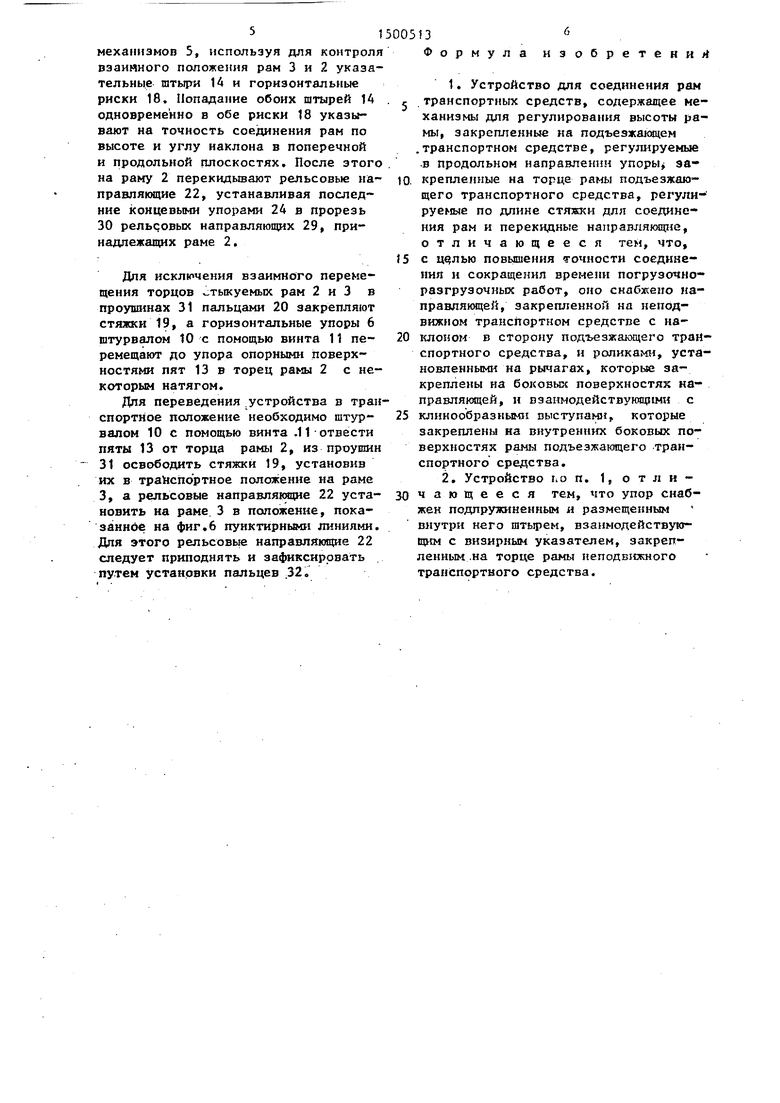
Устройство содержит направлякяцую 1, шарнирно соединенную с рамой 2 неподвижного транспортного средства и установленную наклонно к подъейжа- клцему транспортному средству. Рама 3 подъезжающего транспортного средства представляет собой П-образную ра- ,му, перемещающуюся на колёсном ходу 4. На раме 3 размещены механнзмьт 5, предназначенные для регулирования . высоты рамы при выравнивании рам 2 и 3 по высоте и углу наклона в поперечной и продольной плоскостях. Между рамами 2 и 3 расположены подвижные в горизонтальной плоскости упоры 6, которые одним концом жестко соединены с рамой 3, а другим концом в рабочем положении устройства упираются в торец рамы 2.
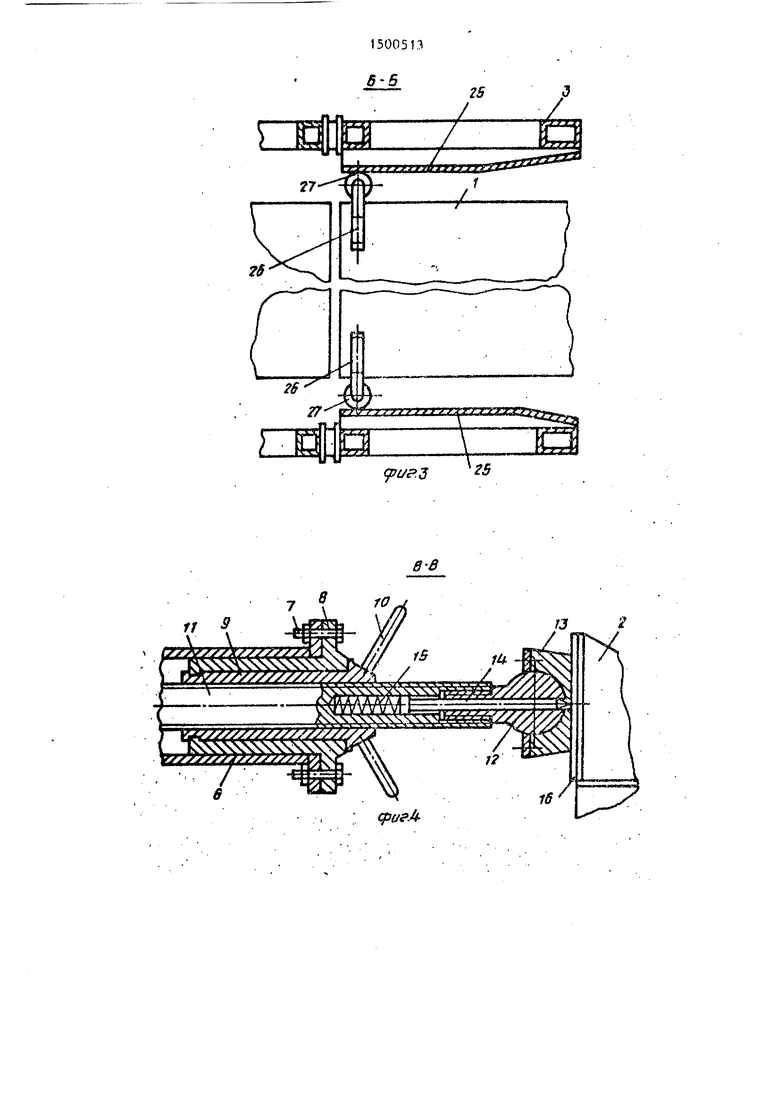
Упор 6 представляет собой крон- штейн, к фланцу которого болтами 7 прикреплена.втулка 8. Внутри последней установлена с возможностью вращения направляющая 9, на наружной поверхности которой расположен штур- вал 10. Внутри направляющей 9 расположен винт 11, имеющий возможность перемещения вдоль направляющей 9 по резьбе. На конце винта И размещена сфера 12, на которой установлена пя- та 13. Внутри винта 11 помещен указательный штырь 14, который имеет возКюжность выступать за опорную плоскость пяты 13 под воздействием пружины 15. На торце рамы 2 непод- вижного .транспортного средства напротив ynqpoB 6 закреплены визирные указатели 16, представляющие собой металлические пластины с нанесенными на них вертикальными 17 и горизон- тальиыми 18 рисками, предназначенны ми для взаимодействия со шть1рем 14 в процессе контроля операции выравнивания рам 2 и 3 по высоте и углу
34
наклона в поперечной и продольной Ш10СКОСТЯХ. Точность соединения рам
2и 3 определяется попаданием штыря 14 в точку пересечения рисок 17 и 18 С внешней стороны упоров 6 между ра,мами 2 и 3 расположены стяжки 19,
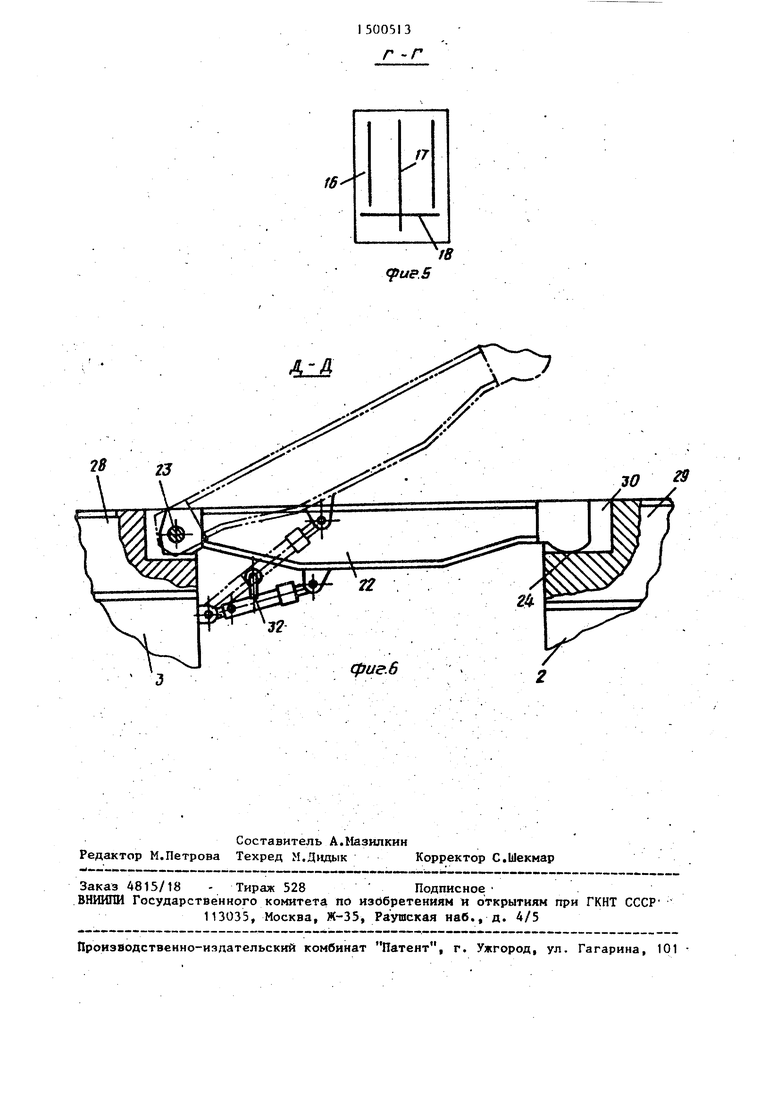
регулируемые по длине и шарнирно соединяемые с рамами 2 и 3 соответственно пальцами 20 и 21. Между рамами 2 и 3 над направляющей 1 установлены перекидные рельсовые направляющие 22, представляющие собой силовые балки, закрепленные на раме
3шарнирно пальцем 23, а на раму 2 опирающиеся концевыми упорами 24. На внутренних боковых поверхностях рамы 3 установлены клинообразные выступы 25. На боковых поверхностях направляющей 1 размещены рычаги 26 с роликами 27, которые при сближении рам
2и 3, взаимодействуя с выступами 25 осуществляют выравнивание рамы 3 относительно рамы 2 в продольной горизонтальной плоскости.
Устройство работает следующим образом.
Для соединения рамы 2 неподвижного транспортногр средства с рамой 3 подъезжающего транспортного средства при перегрузке груза с одного на другое и обратно по рельсовым направ 28 и 29, чтобы иметь возможность точно совместить стыки этих рельсовых направляющих, раму 3 перемещают на колесном ходу 4 вдоль неподвижной наклонной направляющей 1. Ь процессе этого перемещения ролики 27 вступают во взаимодействие с выступами 25 и при дальнейшем сближении рам 2 и 3 одновременно происходит выравнивание оси рамы
3относительно оси рамы 2 в продольной горизонтальной плоскости Перемещение рамы 3 на колесном ходу 4 производят до упора подвижных пят
13 в торец рамы 2. Затем враще1тем штурвала 10 отводят пяту 13 до тех пор, пока не будет видно взаимного положения подпружиненного указательного штыря 14 и рисок 17 и 18 ви- зирного указателя 16. Попадание штыря 14 в вертикальную риску 17 .указывает на точность подъезда рамы 3 к раме 2 в продольной горизонтальной плоскости. Затем производят выравнивание рамы 3 относительно рамы 2 tio высоте и углу наклона в поперечной и продольной плоскостях с помощь
5
механизмов 5, используя для контроля взаимного положения рам 3 и 2 указательные штыри 1А и горизонтальные риски 18. Попадание обоих штырей 1А одновременно в обе риски 18 указывают на точность соединения рам по высоте и углу наклона в поперечной и продольной плоскостях. После этого на раму 2 перекидьтают рельсовые направляющие 22, устанавливая последние концевыми упорами 24 в прорезь
30рельсовых направляющих 29, принадлежащих раме 2.
Для исключения взаимного перемещения торцов ,тыкуемых рам 2 и 3 в проушинах 31 пальцами 20 закрепляют стяжки 19, а горизонтальные упоры 6 штурвалом 10 с помощью винта 11 перемещают до упора опорными поверхностями пят 13 в торец рамы 2 с некоторым натягом.
Для переведения устройства в транспортное положение необходимо штурвалом 10 с помощью винта И1 отвести пяты 13 от торца рамы 2, из проушин
31освободить стяжки 19, установив их в транспортное положение на раме 3, а рельсовые направлякяцие 22 установить на раме. 3 в положение, показанное на фиг.6 пунктирным линиями. Для этого рельсовые направляющие 22 следует приподнять и зафиксировать путем установки пальцев .32.
005
Формула изобретен и t
1. Устройство для соединения рам J транспортных средств, содержащее механизмы для регулирования высоты рамы, закрепленные на подъеэжакицем .транспортном средстве, регулируемые В продольном направлении упоры эа10. крепленные на торца рамы подъезжающего транспортного средства, регулируемые по длине стяжки для соединения рам и перекидные направляющие, отличающееся тем, что,
15 с повышения ч-очности соединения и сокращенил времени погрузочно- разгрузочных работ, оно снабжено направляющей, закрепленной на неподвижном транспортном средстве с на20 клоном в сторону подъезжающего трай- спортного средства, и роликами, установленными на рычагах, которые закреплены на боковых поверхностях на- правляняцей, и взаимодействукяцими с
25 клинообразными выступам, которые закреплены на внутренних боковых поверхностях рамы подъезжакяцего транспортного средства.
2. Устройство Lon. 1, отлиЗочающееся тем, что упор снабжен подпружиненным и размещенным внутри него штырем, взаимодействую- Щ11м с визирным указателем, закрепленным .на торце рамы неподвижного транспортного средства.
..r
5-5
J
О
(рир.З
гв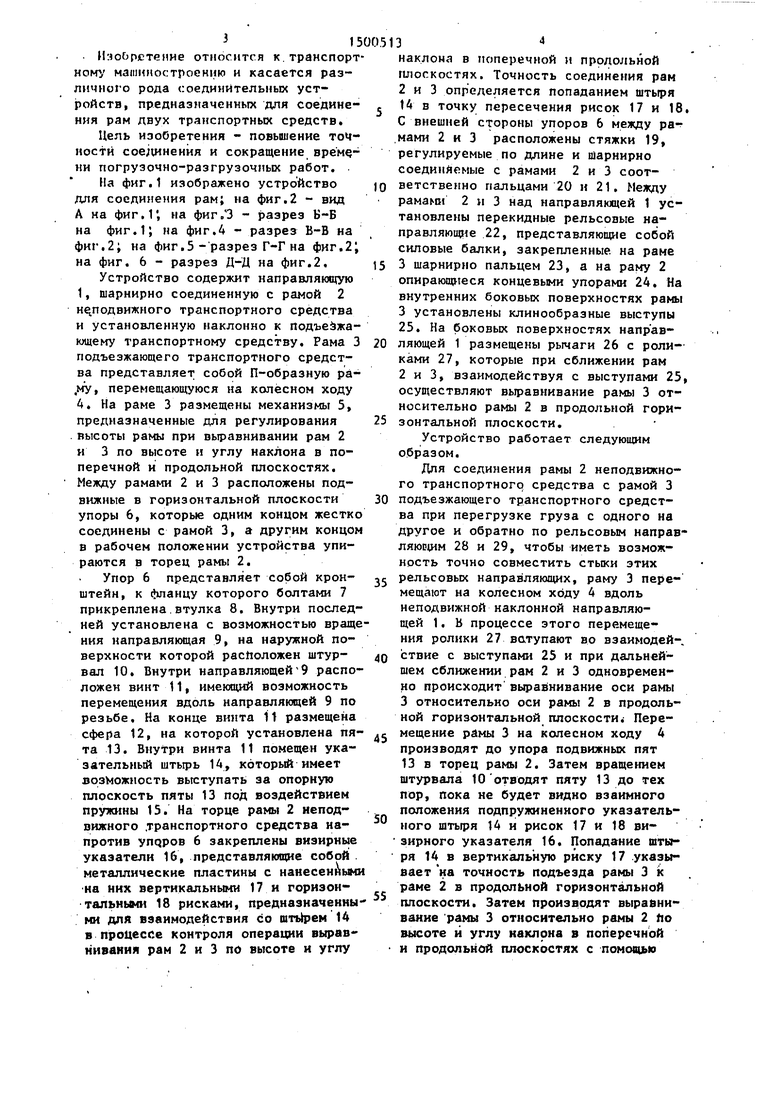
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля курса движения транспортного средства при его подъезде к заданному объекту | 1987 |
|
SU1495418A1 |
| Прицеп | 1987 |
|
SU1470602A1 |
| Автопоезд | 1989 |
|
SU1761562A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ | 2006 |
|
RU2312779C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1992 |
|
RU2025350C1 |
| Транспортное средство для погрузки и буксировки аварийных транспортных средств | 1990 |
|
SU1823826A3 |
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| Транспортное средство для перевозки контейнеров | 1984 |
|
SU1230886A2 |
| Рельсовый тормоз | 1990 |
|
SU1763274A1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2005 |
|
RU2295850C1 |

Изобретение относится к транспортному машиностроению, а конкретно к устройствам перегрузки груза с одного транспортного средства на другое. Цель изобретения - повышение точности соединения и сокращение времени погрузочно-разгрузочных работ. Устройство для соединения рам транспортных средств содержит наклонную направляющую 1 между рамами 2 и 3, механизмы 5 регулирования высоты рам 2 и 3. На торце рамы 3 закреплены регулируемые упоры с размещенным внутри них подпружиненным штырем. На торце рамы 2 закреплен визирный указатель для взаимодействия со штырем. Между торцами рам 2 и 3 закреплены винтовые стяжки 19 и установлены перекидные рельсовые направляющие. На внутренних боковых поверхностях рамы 3 закреплены клинообразные выступы, а на направляющей 1 упорные ролики. 1 з.п. ф-лы, 6 ил.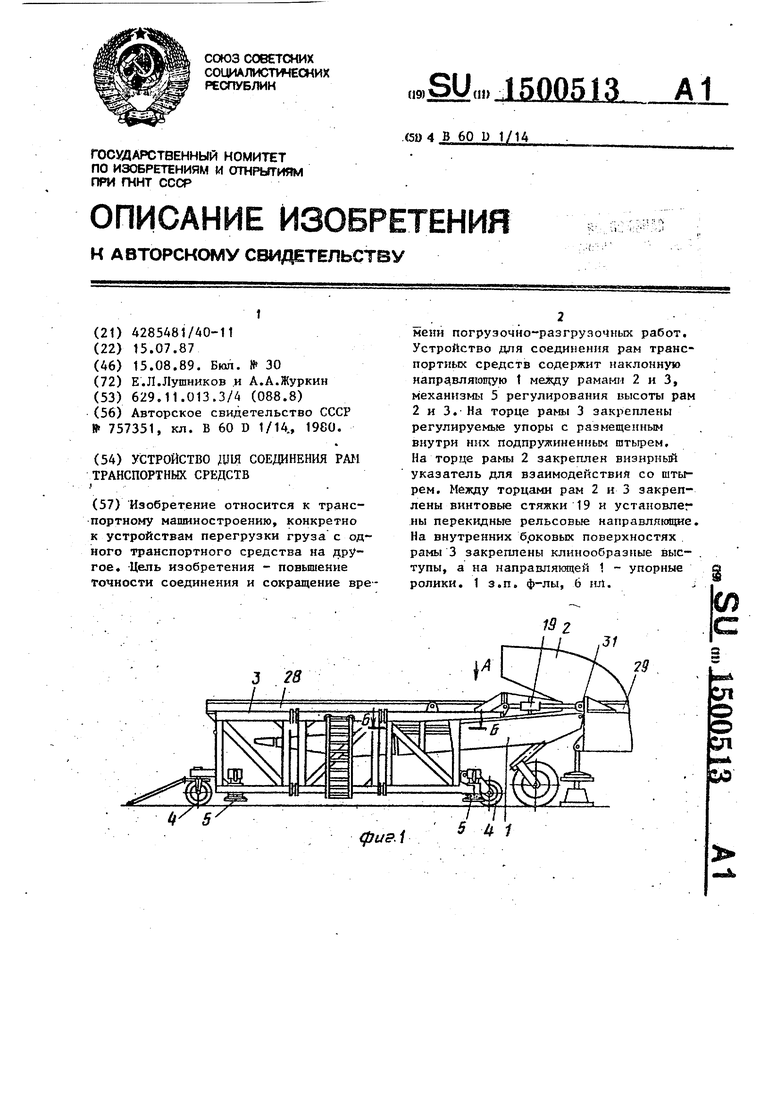
11
I
аттт;
rSK vvvvvVvvvVv
у х У:Х УУхуу Х« х /хУу
W
.4,ilJ
IB
I 500513 Г -Г
fue.S
| Авторское свидетельство СССР В 757351, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| ъ | |||
