ющего сигнала следящего привода, близкой по динамике и траектории дви-- жения объекта в промежутках времени прогноза за счет введения дополни- тельной информации о прогнозах уско-, рения при формировании квадратичной по времени составляющей и введении информации о прогнозах скорости, ускорения и рывка при формировании линейной составляющей сзгммарного уп- равляюа1его сигнала следящего привода роме того, осуществляются стыковка
149574Г4
соседних интервалов прогноза, а именно отработанного и вновь заданного, путем формирования дополнительной по- tj следовательности импульсов с частотой, равной частоте задания прогноза угла, отрицательной амплитуд&й, пропорциональной значению времени прогноза, скважностью 0,5, суммирование 10 ее с сигналом разности текущего начального времени и использование по- луг енного сигнала в основном аналити- .ческом выражении. 3 ип.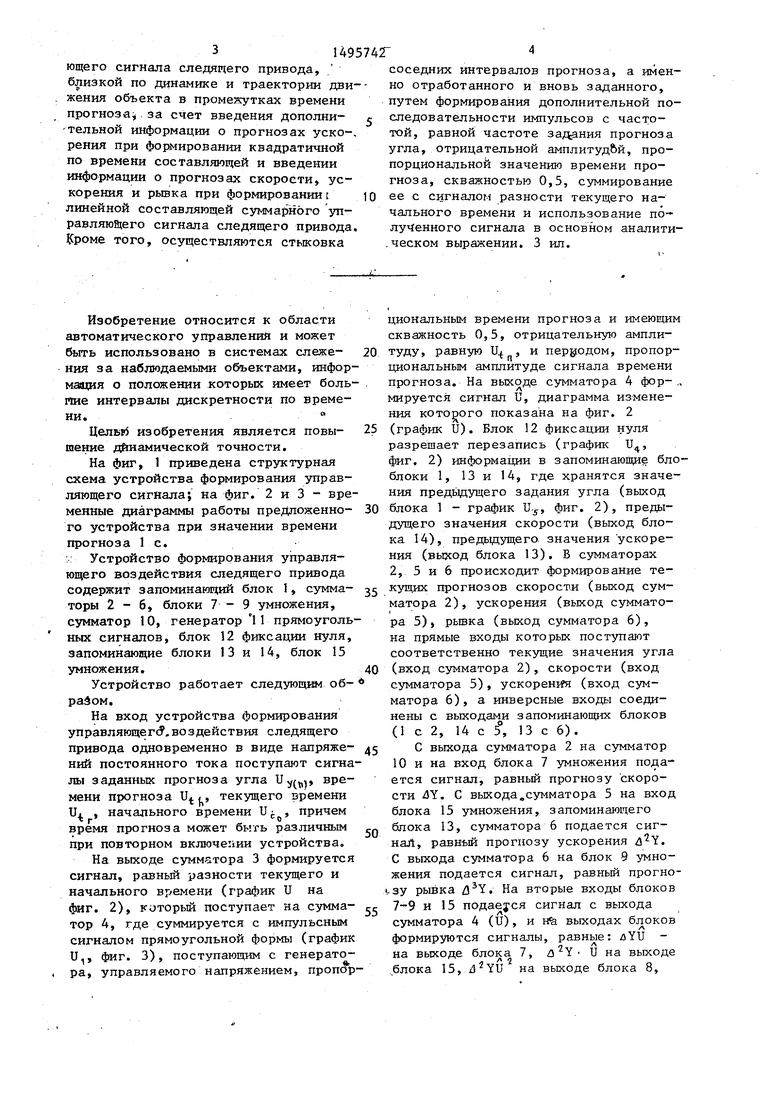
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования управляющего сигнала следящего привода | 1984 |
|
SU1348768A1 |
| Устройство для разгона и торможения электропривода | 1989 |
|
SU1725183A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
Изобретение относится к автоматическому управлению и может быть использовано в системах слежения за наблюдаемыми объектами, информация о положении которых имеет большие интервалы дискретности по времени. Целью изобретения является повышение динамической точности. Устройство формирования управляющего воздействия следящего привода содержит запоминающий блок 1, сумматоры 2-6, блоки умножения 7-9, сумматор 10, генератор 11 прямоугольных сигналов, блок 12 фиксации нуля, запоминающие блоки 13, 14, блок 15 умножения. Поставленная цель обеспечивается формированием функции задания управляющего сигнала следящего привода, близкой по динамике и траектории движения объекта в промежутках времени прогноза, за счет введения дополнительной информации о прогнозах ускорения при формировании квадратичной по времени составляющей и введении информации о прогнозах скорости, ускорения и рывка при формировании линейной составляющей суммарного управляющего сигнала следящего привода. Кроме того, осуществляются стыковка соседних интегралов прогноза, а именно отработанного и вновь заданного, путем формирования дополнительной последовательности импульсов с частотой, равной частоте задания прогноза угла, отрицательной амплитудой, пропорциональной значению времени прогноза, скважностью 0,5, суммирование ее с сигналом разности текущего начального времени и использование полученного сигнала в основном аналитическом выражении. 3 ил.
Изобретение относится к области автоматического управления и может быть использовано в системах слеже- ння за наблюдаемыми объектами, инфор- маащя о положении которых имеет боль- ptee интервалы дискретности по времени.
ЦелБЙ изобретения является повы- шение динамической точности.
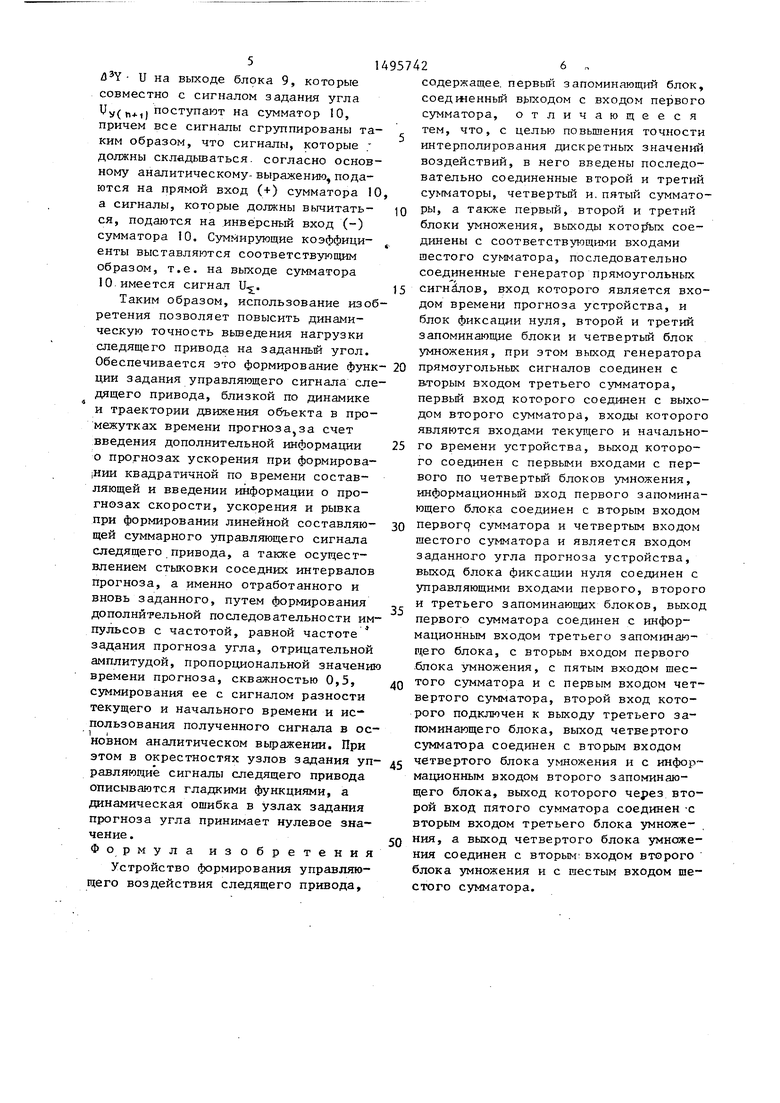
На фиг, 1 приведена структурная схема устройства формирования управляющего сигнала; на фиг. 2 и 3 - временные диаграммы работы преДложенно- го устройства при значении времени прогноза 1с.
: Устройство формирования управляющего воздействия следящего привода содержит запоминающий блок 1, сумма- торы 2-6, блоки 7 - 9 умножения, сумматор 10, генератор 11 прямоугольных сигналов, блок 12 фиксации нуля, запоминающие блоки 13 и 14, блок 15 умножения.
Устройство работает следующим обра5ом.
На вход устройства формирования управляющегсУ, воз действия следящего привода одновременно в виде напряже- НИИ постоянного тока поступают сигналы заданных прогноза угла U,,, времени прогноза и., текущего времени Ui , начального времени U , причем
время прогноза может быть различным при повторном включении устройства.
На выходе сумматора 3 формируется сигнал, равный разности текущего и начального времени (график U на фиг. 2), который поступает на сумма- тор 4, где суммируется с импульсным сигналом прямоугольной формы (график и, фиг. 3), поступающим с генератора, управляемого напряжением, пропор0
5
0
5 0
5
0
е
циональным времени прогноза и имеющим скважность 0,5, отрицательную амплитуду, равную и , и периодом, пропорциональным амплитуде сигнала времени прогноза. На выходе сумматора 4 фор-., мируется сигнал U, диаграмма изменения которого показана на фиг, 2 (график и). Блок 12 фиксации нуля разрешает перезапись (график U, фиг. 2) информации в запоминающие бло- блоки 1, 13 и 14, где хранятся значения предьщущего задания угла (выход блока 1 - график U, фиг. 2), предыдущего значения скорости (выход блока 14), предьщущего- значения ускорения (выход блока 13), В сумматорах 2, 5 и 6 происходит формирование текущих прогнозов скорост.и (выход сумматора 2), ускорения (выход сумматора 5), рьшка (выход сумматора 6), на прямые входы которых поступают соответственно текзщие значения угла (вход сумматора 2), скорости (вход сумматора 5), ycKopsHjfH (вход сумматора 6), а инверсные входы соединены с выходами запоминающих блоков (1 с 2, 14 с , 13 с 6),
С выхода сумматора 2 на сумматор 10 и на вход блока 7 умножения подается сигнал, равный прогнозу скорости 4Y, С выхода„сумматора 5 на вход блока 15 умножения, запоминающего блока 13, сумматора 6 подается сигнал, равном прогнозу ускорения , С выхода сумматора 6 на блок 9 умножения подается сигнал, равный прогно- л.зу рывка , На вторые входы блоков 7-9 и 15 подаемся сигнал с выхода сумматора 4 (U), и iife выходах блоков формируются сигналы, равные: /sYU - на выходе блока 7, U на выходе
О
„блока 15, на выходе блока 8,
5
d Y и на выходе блока 9, которые совместно с сигналом задания угла Uy( +,j поступают на сумматор 10, причем все сигналы сгруппированы таким образом, что сигналы, которые ; должны складьюаться. согласно основному аналитическому-выражению, подаются на прямой вход (+) сумматора 10, а сигналы, которые должны вычитать14
ся, подаются на инверсный вход (-) сумматора 10. Суммирующие коэффициенты выставляются соответствующим образом, т.е. на выходе сумматора 10 имеется сигнал U.
Таким образом, использование изобретения позволяет повысить динамическую точность вьшедения нагрузки следящего привода на заданньй угол. Обеспечивается это формирование функ ции задания управляющего сигнала следящего привода, близкой по динамике и траектории движения объекта в промежутках времени прогноза за счет введения дополнительной информации о прогнозах ускорения при формирова- |Нии квадратичной по времени составляющей и введении информации о прогнозах скорости, ускорения и рывка при формировании линейной составляющей суммарного управляющего сигнала следящего привода, а также осуществлением стыковки соседних интервалов прогноза, а именно отработанного и вновь заданного, путем формирования дополнительной последовательности импульсов с частотой, равной частоте задания прогноза угла, отрицательной амплитудой, пропорциональной значению времени прогноза, скважностью 0,5, суммирования ее с сигналом разности текущего и начального времени и использования полученного сигнала в основном аналитическом выражении. При этом в окрестностях узлов задания уп равляюрдие сигналы следящего привода описываются гладкими функциями, а динамическая ошибка в узлах задания прогноза угла принимает нулевое значение . Формула изобретения
Устройство формирования управляющего воздействия следящего привода.
,
10
15
25
30
- 20 - дс 5Q
содержащее, первый запоминающга блок, соедтенный вэкодом с входом первого сумматора, отличающееся тем, что, с целью повышения точности интерполирования дискретных значений воздействий, в него введены последовательно соединенные второй и третий су гматоры, четвертый и. пятый сумматоры, а также первый, второй и третий блоки умножения, выходы KOTOpfbrx соединены с соответствующими входами шестого сумь атора, последовательно соединенные генератор прямоугольных сигналов, вход которого является входом времени прогноза устройства, и блок фиксации нуля, второй и третий запоминающие блоки и четвертый блок умножения, при этом выход генератора прямоугольных сигналов соединен с в.торым входом третьего сумматора, первый вход которого соединен с выходом второго сзгмматора, входы которого являются входами текущего и начального времени устройства, выход которого соединен с первыми входами с первого по четвертьй блоков умножения, информационньй вход первого запоминающего блока соединен с вторым входом первого сумматора и четвертым входом шестого cyi maTOpa и является входом заданного угла прогноза устройства, выход блока фиксации нуля соединен с управляющими входами первого, второго и третьего запоминающих блоков, выход первого сумматора соединен с информационным входом третьего запоминающего блока, с вторым входом первого .блока умножения, с пятым входом шестого сумматора и с первым входом четвертого сумматора, второй вход которого подключен к выходу третьего запоминающего блока, выход четвертого сумматора соединен с вторым входом четвертого блока умножения и с инфор мационным входом второго запоминающего блока, выход которого через второй вход пятого сумматора соединен -с вторым входом третьего блока умноже- , ния, а выход четвертого блока умножения соединен с вторым: входом второго блока умножения и с шестым входом шестого сумматора.
35
40
lyj./
у If -I
f/ f/ /y л г f f
j/ j
I
to
30
««;
(io{i},
у
U
/J J.C
4 U U U U LJ
n
fJ C
е/5
2
3
-tH
5 ,c
Фив.З
| Хемминг Р | |||
| В | |||
| Численные методы | |||
| -М.: Наука, 1972 | |||
| Фильчаков П | |||
| Ф | |||
| Численные и графические методы прикладной математики | |||
| -Киев: Наукова думка, 1970 | |||
| Анго А | |||
| Математика для электро- и радиоинженеров.-гМ.: Наука, 1965 | |||
| .Белянский П | |||
| В., Сергеев Б | |||
| Г | |||
| Управление наземными антеннами и радиотелескопами.-М | |||
| : Сов« тское радио, 1980, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Uyn | |||
