Nj:
СО
ел kj
4
io
lo. fl i иг,
3149
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками i
Цель изобретения - расширение области применения устройства и его упрощеннее.
На фиг«1 изображена схема устрой- ства; на фиг 2 - графическая аналогия первого этапа работы;..на фиг.З - аналогия второго этапа; на фиго 4 - вариант выпoлнeJEfflя схемы линейного интерполятора
Устройство состоит из кругового интерполятора 1, построенного на цифровых дифференциальных анализаторах, линейного интерполятора 2, реверсивных счетчиков 3 - 5, счетчиков
6и 7, генератора 8, элементов И 9 - 15, элемента ИЙИ 16, триггеров 17 - 19.
Круговой интерполятор 1 построен на цифровых дифференциальных анализа торах, причем счетчики 3 и 4 являпот- ся счетчиками подьштегральйой; функции интерполятора 1
Перед началом работы счетчики 5 7и триггеры 17 - 19 сброшены в нуль Координаты точки А (, Y) занос ся в реверсивные счетчики 3 и 4 соответственно .
В первую координату линейного интерполятора 2 заносится код прямого угла в желаемых величинах измерения, например 90°, 5400 или 1Г/2с
Устройство работает следзпощим об- разомо
Сигналом Пуск триггер I7 уста- навливается в единицу и своим единичным потенциалом открьгеает элементы .Й 9, 11 и 13о Тогда импульсы высокой частоты с выхода генератора 8 через элемент И 13 начинают поступать на суммирующий вход реверсивного счет- чика 5 и на вход элемента ИЛИ 16, с выхода которого импульсы поступают на вход аргумента кругового интерполятора I, Интерполятор начинает по- ворачивать отрезок ОА, как это показано на фиг с, 2, при этом импульсы с выхода координаты X кругового интерполятора 1 через элемент И 9 посту пают на суммирующий вход реверсивно- го счетчика 3, а импульсы с выхода координаты Y через элемент И 1.1 .- на вычитающий вход реверсивного счетчика 4о Так продолжается до тех пор.
пока радиус ОА не совместится с осью Xi что определяется по нулевому состоянию счетчика 4, причем сигнал Нуль счетчика 4 сбрасьгоает в нуль триггер 17 и устанавливает в единицу триггер 18, элементы И 9, 11 и 13 закрьгоаютсяо В счетчике 3 величина равна RO К этому моменту на вход реверсивного счетчика 5 поступает количество импульсов, равное углу tf в единицах аргумента кругового интерполятора 1 о
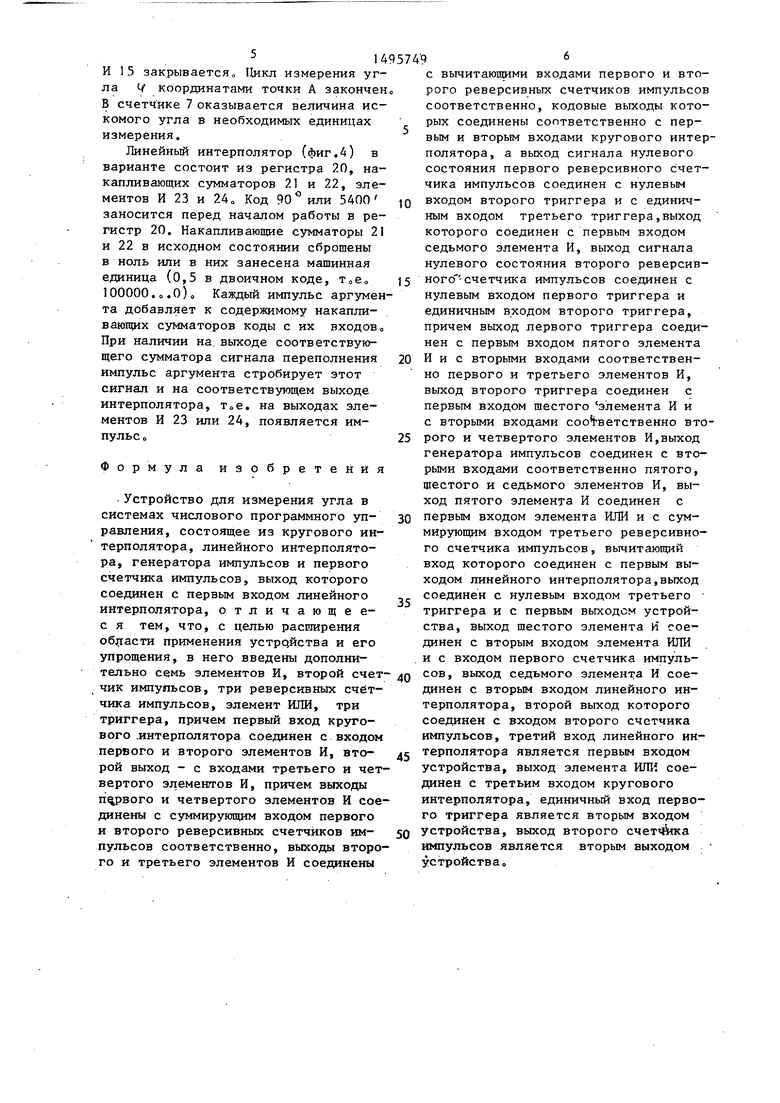
Единичный потенциал с выхода триггера 18 открывает элементы И 10, 12 и 14, в результате чего частота с выхода генератора 8 через элемент И 14 поступает на вход счетчика 6 и через элемент ИЛИ 16 на вход аргумента кругового интерполятора 1 Но те- п.ерь исходные данные для интерполятора 1 равны: Х„ R, Y О Выход координаты X - через элемент И 10 к вычитающему входу счетчика 3, а выход координаты Y - через элемент И 12 к суммирующему входу счетчика 4, что обеспечивает интерполяцию дуги радиуса R против часовой стрелки, как эт.о показано на фиГоЗ Интерполяция против ча-совой стрелки продолжается до тех пор, пока в счетчике 3 не окажется нуль.
Это означает, что ректор радиуса R повернулся на 90 и совместился с осью Y. При этом на вход счетчика 6 прошло количество импульсов аргумента, соответствующее 90° в угловой мере интерполятора 1 о Сигнал Нуль счетчика 3 сбрасьшает в нуль триггер 19. Прохождение частоты через элемент И 14 на вход счетчика 6 и интерполятора 1 через элемент ИЛИ 16 прекращается, одновременно закрьгеаются элементы И 10 и 12. Теперь единичный потенциал с выхода триггера 19 открывает элемент И 15 и частота генератора 8 поступает на вход аргумента линейного интерполятора 2, в одну из координат которого занесена величина прямого угла в единицах аргумента интерполятора 1. Выходные сигналы с выхода первой координаты поступают на вход счетчика 7, а с выхода второй - на вычитающий вход реверсивного счетчика 5 о
Так продолжается до тех пор, пока счетчик 5 не придет в состояние нуля и сигнал его нулевого состояния не сбросит в нуль триггер 19и Элемент
И 15 закрывается Цикл измерения угла Ч координатами точки А закончен В счетчике 7 оказывается величина искомого угла в необходимых единицах измерения.
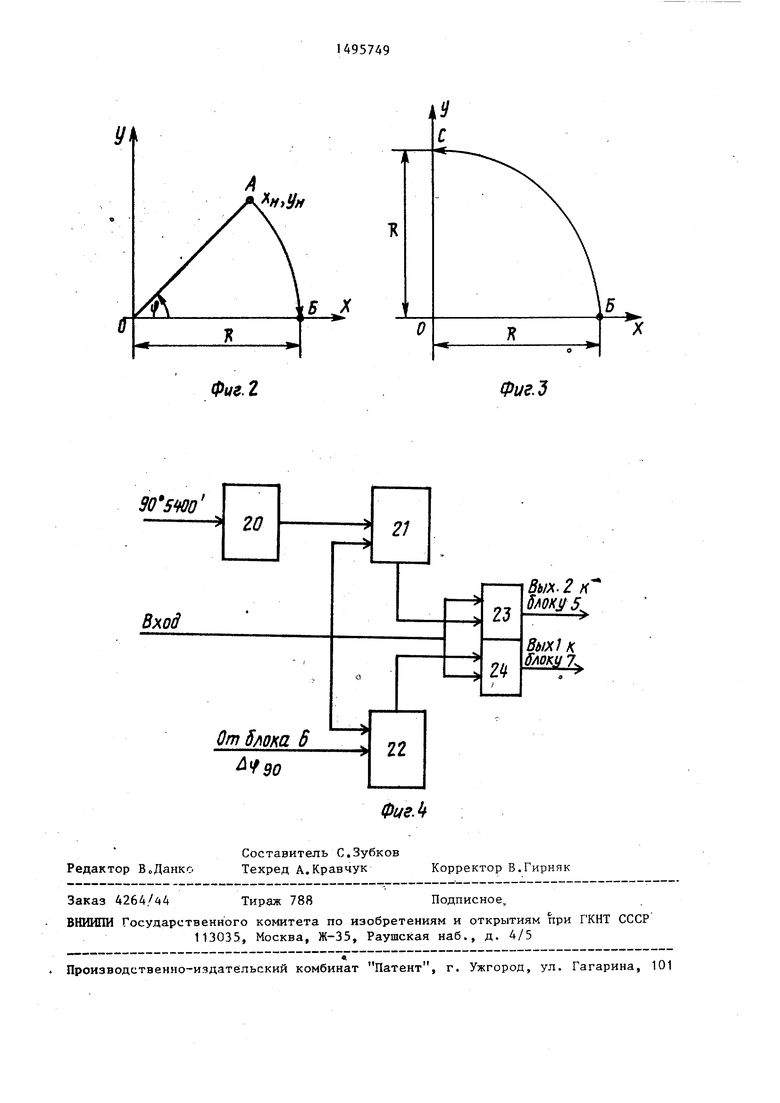
Линейный интерполятор (фиг.4) в варианте состоит из регистра 20, накапливающих сумматоров 21 и 22, элементов И 23 и 24 о Код 90 или 5400 заносится перед началом работы в регистр 20. Накапливающие сумматоры 21 и 22 в исходном состоянии сброшены в ноль или в них занесена машинная единица (0,5 в двоичном коде, Тое, 100000.о.о)о Каждый импульс аргумента добавляет к содержимому накапливающих сумматоров коды с их входов При наличии на. выходе соответствующего сумматора сигнала переполнения импульс аргумента стробирует этот сигнал и на соответствующем выходе интерполятора, Тов. на выходах элементов И 23 или 24, появляется импульс о
Формула изобретения
- Устройство для измерения угла в системах числового программного управления, состоящее из кругового интерполятора, линейного интерполятора, генератора импульсов и первого счетчика импульсов, выход которого соединен с первым входом линейного интерполятора, отличающее- с я тем, что, с целью расширения обдасти применения устрцйства и его упрощения, в него введены дополни0
0
5
0
5
с вьгчитаюпшми входами первого и второго реверсивных счетчиков импульсов соответственно, кодовые выходы которых соединены соответственно с пер- Bbw и вторым входами кругового интерполятора, а выход сигнала нулевого состояния первого реверсивного счетчика импульсов соединен с нулевым входом второго триггера и с единичным входом третьего триггера,выход которого соединен с первым входом седьмого элемента И, выход сигнала нулевого состояния второго реверсивного - счетчика импульсов соединен с нулевым входом первого триггера и единичным входом второго триггера, причем выход первого триггера соединен с первым входом пятого элемента И и с вторыми входами соответственно первого и третьего элементов И, выход второго триггера соединен с первым входом щестого элемента И и с вторыми входами соответственно второго и четвертого элементов И,выход генератора импульсов соединен с вто- рымк входами соответственно пятого, щестого и седьмого элементов И, выход пятого элемента И соединен с первым входом элемента ИЛИ и с суммирующим входом третьего реверсивного счетчика импульсов, вычитающий вход которого соединен с первым выходом линейного интерполятора,выход соединен с нулевым входом третьего триггера и с первым выходом устройства, выход шестого элемента И соединен с вторым входом элемента ШШ и с входом первого счетчика импуль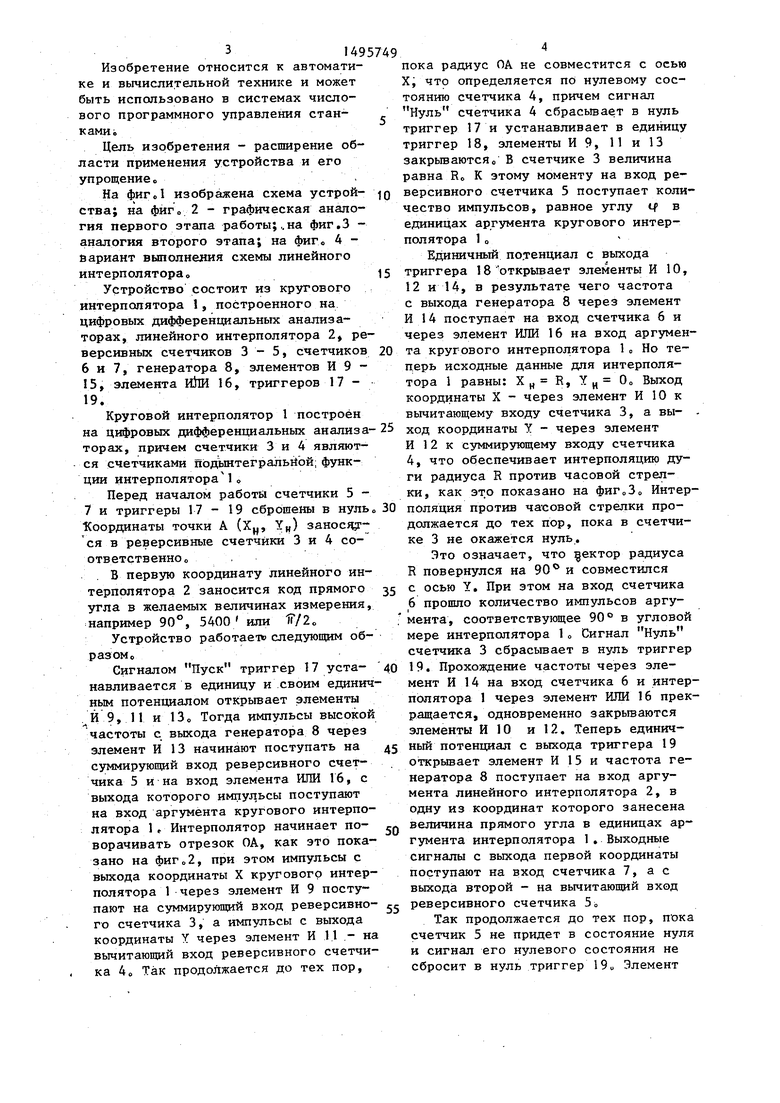
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Устройство для измерения угла в системах числового программного управления | 1991 |
|
SU1837257A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Устройство для коррекции эквидистанты | 1986 |
|
SU1318992A1 |
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками. Целью изобретения является расширение области применения устройства и его упрощение. Для этого в устройство, состоящее из кругового интерполятора 1 на ЦДА, линейного интерполятора 2, генератора 8 и первого счетчика 6, дополнительно вводят семь элементов И 9-15, второй счетчик 7, три реверсивных счетчика 3, 4, 5, элемент ИЛИ 16 и три триггера 17, 18, 19 с соответствующими связями. 4 ил.
тельно семь элементов И, второй счет- п сов, выход седьмого элемента И сое- чик импупьсов, три реверсивных счётчика импульсов, элемент ИЛИ, три триггера, причем первый вход кругового .интерполятора соединен с входом первого и второго элементов И, вто- дд рой выход - с входами третьего и четвертого элементгов И, причем выходы первого и четвертого элементов И соединены с суммирующим входом первого и второго реверсивных счетчиков им- 50 пульсов соответственно, выходы второго и третьего элементов И соединены
динен с вторым входом линейного интерполятора, второй выход которого соединен с входом второго счетчика импульсов, третий вход линейного интерполятора является первым входом устройства, выход элемента ИШ соединен с третьим входом кругового интерполятора, единичный вход первого триггера является вторым входом устройства, выход второго импульсов является вторым выходом устройства
сов, выход седьмого элемента И сое-
динен с вторым входом линейного интерполятора, второй выход которого соединен с входом второго счетчика импульсов, третий вход линейного интерполятора является первым входом устройства, выход элемента ИШ соединен с третьим входом кругового интерполятора, единичный вход первого триггера является вторым входом устройства, выход второго импульсов является вторым выходом устройства
Фиг. 2
эо зт
го
Вход
От SAOKU 6
90
Фиг. З
21
2J
Вых.2 к
SAOKI/5
2
Вых1 к блоку 7
22
| Сб | |||
| Электроавтоматика станков | |||
| Системы числового управления и перспективы их развития Машиностроение, 1975 | |||
| Программное задающее устройство | 1979 |
|
SU811214A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
