Изобретение относится к автомати- ческому контролю и управлению, в частности к технике централизованного автоматического контроля и управления многостадийными взаимосвязанными непрерывными технологическими процессами с помощью одного централизованного контролирующего ипи управляющего устройства.
Цель изобретения - улучиение качества контроля и управления технологическими процессами.
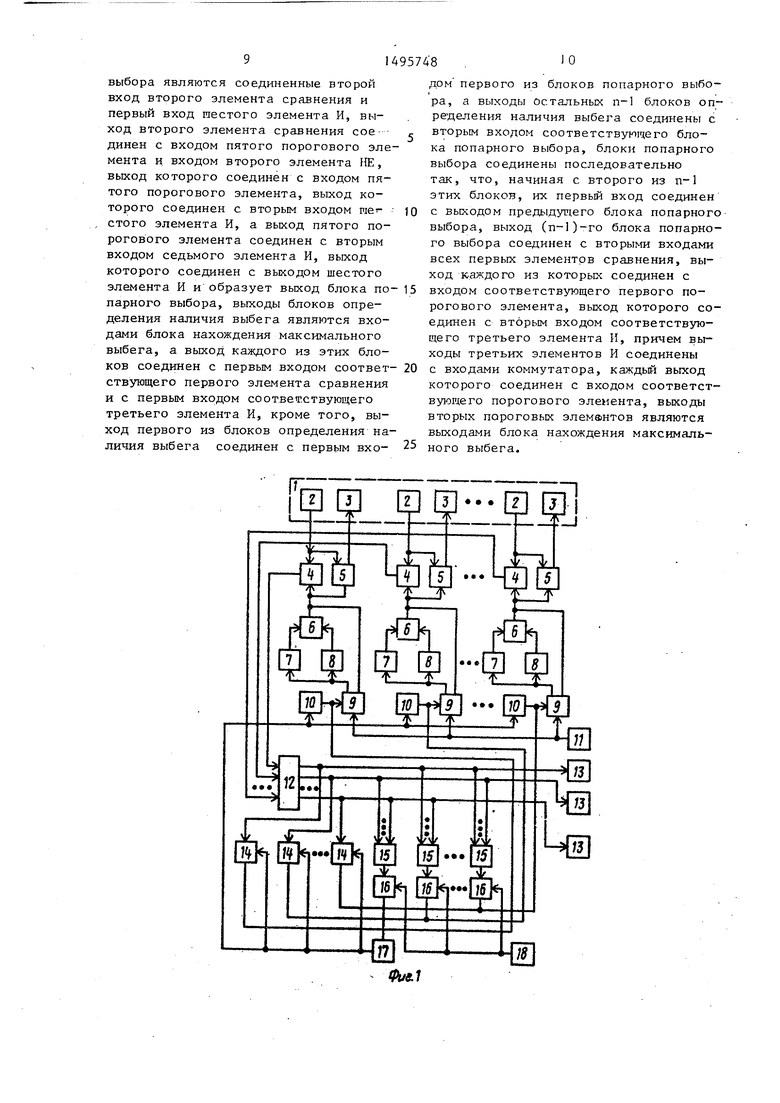
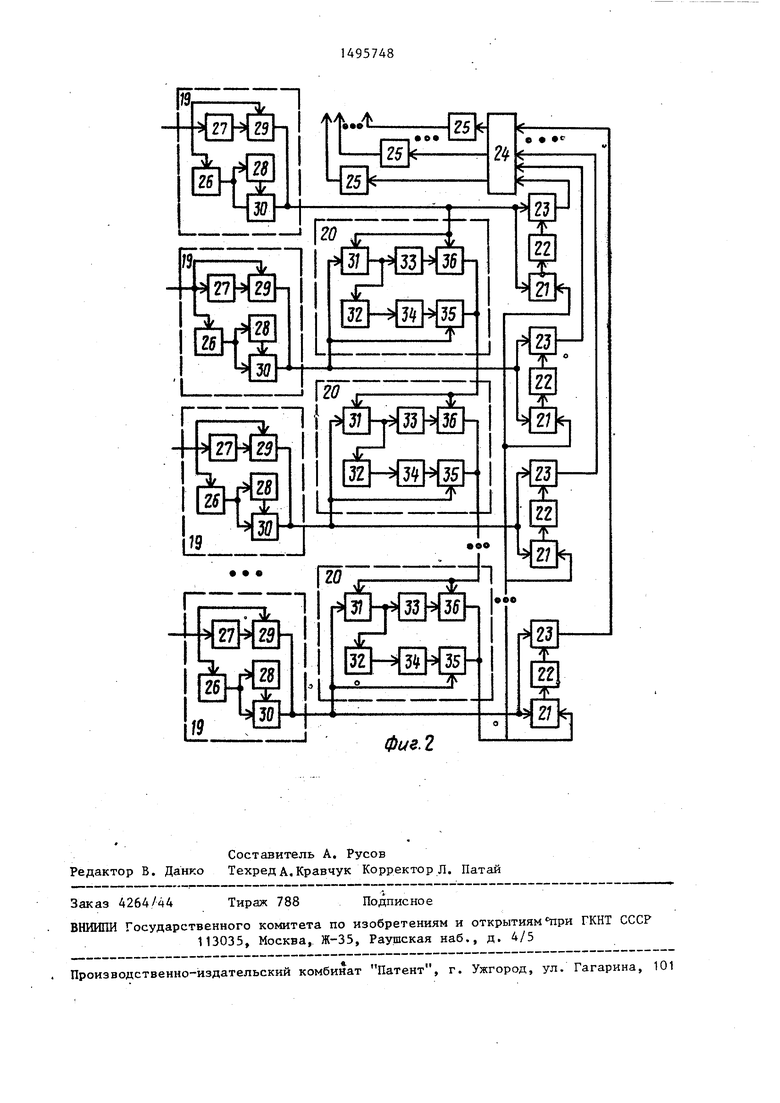
На фиг. 1 приведена блок-схема задающего устройства в системах централизованного контроля и управления; на фиг. 2 - блок-схема блока нахождения максимального выбега.
Задающее устройство в системах централизованного контроля и управле-- ния соединено с объектом 1 управления, содержащим п датчиков 2 нагрузки и п исполнительных механизмов 3, состоит из п блоков 4 обнаружения выбегов, п блоков 5 управления, п сумматоров .6, п усилителей 7, п блоков 8 возведения в квадрат, п релейных элементов 9, п выключателей 10, первого задатчика I1 номинального параметра нагрузки, блока 12 нахождения максимального выбега, п сигнальных элементов 13, п первых элементов . И 14, п элементов ИЛИ 15, п вторых элементов И 16, второго задатчика 17 и третьего задатчика 18.
Блок 12 нахождения максимального выбега содержит группу из п блоков Л9 определения наличия выбега, группу из п-1 блоков 20 попарного выбора, группу из п первых элементов 21 сравнения, группу из п первых пороговых
4;:
СО
ел
4:
00
элементов 22, группу из п третьих элементов И 23, коммутатор 24, группу из п вторых пороговых элементов 25. Каждый из блоков 19 нахождения абсолютной величины выбега содержит первьй элемент НЕ 26, третий и четвертый пороговые элементы 27 и 28, четвертый и пятьй элементы И 29 и 30 Каждый из блоков 20 попарного выбора содержит второй элемент 31 сравнения второй элемент НЕ 32, пятьш и шестой пороговые элементы 33 и 34, шестой и седьмой элементы И 35 и 36.
Задающее устройство в системах централизованного контроля и управления может быть реализовано на базе УВМ, на базе машин централизованного контроля и регулирования всех кла.ссов
.
57484
грузки, в случае отклонения сигналои
датчиков от заданного диапазона допустимых значений параметра нагрузки соответствующий блок 4 обнаружения выбегов вырабатывает сигнал, равный разности между заданным значением параметра нагрузки и фактическим, поступающим с датчика 2 нагрузки. Дан10 ные сигналы поступают на входы блока 12 обнаружения максимального выбега. Блок 12 обнаружения максимального выбега вырабатьшает сигнал, поступающий на один из п его выходов,
15 соответствующий параметру нагрузки, по которому в одном из блоков 4 обнаружения выбегов получено максимальное расхождение. Данньш сигнал поступает на соответствующее сигнальное
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство в системах централизованного контроля и управления | 1984 |
|
SU1249485A1 |
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
| Устройство для адаптивного управления технологическим процессом | 1983 |
|
SU1242911A1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| Устройство для адаптивного управления технологическим процессом | 1988 |
|
SU1656495A1 |
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 1992 |
|
RU2036808C1 |
| Пневматическая система централизованного контроля и управления агрегатами с непрерывными технологическими процессами | 1981 |
|
SU1043589A1 |
Изобретение относится к автоматическому контролю и управлению, в частности к технике централизованного автоматического контроля и управления многостадийными взаимосвязанными непрерывными технологическими процессами с помощью одного централизованного контролирующего или управляющего устройства. Целью изобретения является улучшение качества контроля и управления технологическими процессами. Это достигается тем, что в устройство введены дополнительные логические элементы, реле, выключатели и блок нахождения максимального выбега, обеспечивающие выбор в автоматическом режиме определяющего параметра и подстройку остальных параметров нагрузки под выбранный определяющий параметр. 2 ил.
на базе стандартных элементов УСЭППА, 20 устройство 13 и соответствующий перблоков системы Старт и АСКР-.
Устройство работает следующим образом.
В начальном состоянии все релейные элементы 9 находятся в положении, 25 когда их первый вход соединен с вторым выходом. Оператор включает i-й из п выключателей 10, в результате чего сигналом с второго задатчика 17 один из релейных элементов 9 переводится 30 в состояние, когда его первый вход соединен, с первым выходом. На первом задатчике 11 оператор выставляет значение плановой нагрузки по i-му показателю нагрузки X. Сигнал, соответст- 35 вующий значению плановой нагрузки х, поступает через i-й из п релейных элементов 9 на вторые i-x из п блоков 4 обнаружения выбегов и блоков 5 управления. Через остальные 40 ,п-1 релейные элементы 9 сигнал, со- ответствующий значению плановой нагрузки х, поступает на входы усилите-, лей 7 и блоков 8 возведения в квадрат, В результате работы данных бло- дЗ ков и сумматоров 6 на первые входы п-1 блоков 4 обнаружения выбега и.
вьй элемент И 14. В результате этого на второй вход соответствующего релейного элемента 9 с второго задат- . чика 17 поступает сигнал, устанавли- вающий данньй релейньй элемент 9 в положение, когда его первый вход соединен с первым выходом. Этот же сигнал- поступает на п-1 элементов ИЛИ 15 кроме i-ro (i - номер выхода блока 12 нахождения максимального-выбега, i 1, п).
Блоки ИЛИ 15 вырабатыва ют сигналы, в результате чего она вторые входы п-1 р елейных элементов 9 (кроме релейного элемента 9, соответствз ющего параметру нагрузки, по которому блоком 4 обнаружения выбегов вьфаботано максимальное расхождение) с третьего задатчика 18 через вторые элементы И 16 поступает сигнал,-по которому первьй вход релейного элемента 9 соединяется с его вторым выходом. Получив информацию с сигнальных элементов 13, оператор выставляет значение плановой нагрузки на соответствующем задатчике 17.
д-1 блоков 5 управления (кроме i-x блоков 4 и 5) поступает сигнал со значением
у ах + Ьх + с, где у - выход сумматора; а, Ь, с - коэффициенты настройки;
X - вход усилителя и блока возведения в квадрат. На первые входы блоков 4 обнаружения выбегов и блоков 5 управления поступают сигналы от датчиков 2 навьй элемент И 14. В результате этого на второй вход соответствующего релейного элемента 9 с второго задат- чика 17 поступает сигнал, устанавли- вающий данньй релейньй элемент 9 в положение, когда его первый вход соединен с первым выходом. Этот же сигнал- поступает на п-1 элементов ИЛИ 15 кроме i-ro (i - номер выхода блока 12 нахождения максимального-выбега, i 1, п).
Блоки ИЛИ 15 вырабатыва ют сигналы, в результате чего она вторые вход п-1 р елейных элементов 9 (кроме релейного элемента 9, соответствз ющего параметру нагрузки, по которому блоком 4 обнаружения выбегов вьфаботано максимальное расхождение) с третьего задатчика 18 через вторые элементы И 16 поступает сигнал,-по которому первьй вход релейного элемента 9 соединяется с его вторым выходом. Получив информацию с сигнальных элементов 13, оператор выставляет значение плановой нагрузки на соответствующем задатчике 17.
Определение показателя нагрузки, по которому блоком 4 обнаружения выбегов выработано максимальное расхождение, осуществляется блоком 12 нахождения максимального выбега сле- дуюпщм образом. Сигнал, соответствующий разности между величинами за- данного и фактического значения 1-го параметра нагрузки, поступает на вход блока 19 определения наличия выбега. На выходе блока 19 определения наличия выбе1 а появляется сигнал,
являю1чийся абсолютной величиной разности между величинами заданного и фактического значения i-rp параметра нагрузки V., i I, п.
На входы первого из п-1 блоков 20 попарного рыбора поступают значения V и ,j. На выходе первого из п-1 блоков 20 попарного выбора появляет,, ДАЛКС
ся сигнал Y , соответствующий наибольшей величине из V и V . На первый вход i-ro из п-1 блоков 20 попарного выбора (i 2, п-1) постумсхкс
пает сигнал Y ; макс V,. . ., V.
на его второй вход поступает сигнал Vj , а на выходе появляется сигнал
(V макс V,.., ,V т. На выходе {п-1)-го блока 20 попарного выбора
iv,..
появляется сигнал Y
/лаке
макс
20 верти руется первым элементом НЕ 26, в результате чего на выходе пятого элемента И 30 появляется сигнал со значением V; (Y ;). В случае, если V. , сигналы вырабатывают оба по
,,.,Vp, т.е. величина наибольшей
разности между величинами заданных
и фактических значений параметров на- 25 роговых элемента 27 и 28 и на выходе
грузки. Данньш сигнал поступает на блока 19 определения наличия выбега
вторые входы первых элементов 21
у ,,Л«О(КС
сравнения, где инвертируется (-V
На входы первых элементов 21 сравнения поступают сигналы, соот ветствуюп51е разности между величинами заданных и фактических значений параметров нагрузки V., i 1, п. Б случае выработки первым элементом 2 сигнал а А 0 , что свидетельствует о равенстве сравниваемых значений
/VIOKC
соответствующий первый пороговый элемент 22 вырабатывает единичный сигнал, и максимальное значение разности между величинами заданных и фактических значений параметров нагрузки через третий элемент .И 23 поступает на соответствуVf. Vn., ,
ющий вход коммутатора 24. Работающий .г входе блока 20 попарного выбора U
по принципу шагового искателя коммутатор 24 начинает поочередно опрашивать свои входы.
При обнаружении первого из входов, на- котором есть поступающий сигнал, коммутатор 24 соединяет данньй вкод с соответствующим выходом, после чего возвращается в исходное положение. С одного из выходов коммутатора 24 пропущенный им сигнал поступает на соответствующий второй пороговый элемент 25, который вырабатывает единич- ньй сигнал, поступающий на соответствующий выход блока 12 нахождения
50
55
появляется на выходе седьмого элем та И 36. Если и, 14, второй элем 31 сравнения вырабатьшает сигнал А 0, который инвертируется вторым э ментом НЕ 32 в сигнал А 7 О, шестой пороговьй элемент 34 вырабатьшает единичньй сигнал и значение входно сигнала на втором входе блока 20 п парного выбора появляется на выход шестого элемента И 35. Если U , U второй элемент 31 сравнения выраба вает сигнал А 0, в результате об пороговых элемента 33 и 34 вырабат вают единичные сигналы и на вькоде
максимального выбега. Нахождение абсолютной величины разности между ве- личинами заданного и фактического значений параметров нагрузки осуществляется в блоке 19 определения наличия выбега следующ образом. Сигнал со значением V 7 0 поступает на вход третьего порогового элемента 27, ко- торый вырабатывает сигнал, поступаю- пдай на второй вход четвертого элемента И 29, в результате чего сигнал со значением V; поступает на выход блока 19 определения наличия выбега.
Если на вход блока 19 определения наличия выбега поступает сигнал со значением V,, третьим пороговым элементом 27 он не пропускается, инверти руется первым элементом НЕ 26, в результате чего на выходе пятого элемента И 30 появляется сигнал со значением V; (Y ;). В случае, если V. , сигналы вырабатывают оба попоявляется сигнал V ; 0.
Выбор большего . значения из 0 происходит в блоке 20 попарного выбора следующим образом. На первый вход второго элемента 31 сравнения поступает входной сигнал с первого входа блока 20 попарного выбора с положительным знаком и,. На второй вход второго элемента сравнения поступает входной сигнал второго входа блока 20 попарного выбора с отрицательным знаком (-U,) . 0 Б случае, если U , U, вторым
элементом 31 сравнения вырабатывается сигнал А 7 0, пятый пороговьй элемент 33 вырабатывает единичный сигнал и значение входного сигнала на первом
0
5
появляется на выходе седьмого элемента И 36. Если и, 14, второй элемент 31 сравнения вырабатьшает сигнал А 0, который инвертируется вторым элементом НЕ 32 в сигнал А 7 О, шестой пороговьй элемент 34 вырабатьшает единичньй сигнал и значение входного сигнала на втором входе блока 20 попарного выбора появляется на выходе шестого элемента И 35. Если U , U, второй элемент 31 сравнения вырабатывает сигнал А 0, в результате оба пороговых элемента 33 и 34 вырабатывают единичные сигналы и на вькоде
блока 20 попарного выбора появляется сигнал и U,j.
Формула изобретен ия
блока управления соединен с входом соответствующего исполнительного механизма объекта управления, первьй вход каждого блока управления соединен с первым входом соответствующего блока обнаружения выбегов и выходом соответствующего датчика нагрузки управления, отличающееся тем, что, с целью улучщения качества
40
45
контроля и управления технологически- 35 пороговых элементов, каждый блок определения наличия выбега содержит первый элемент НЕ, третий и четвертый пороговые элементы, четвертый и пя- тьй элементы И, входом блока определения наличия выбега являются соединенные входы первого элемента НЕ, третьего порогового элемента И, первый вход четвертого элемента И, выход элемента НЕ соединен с входом . четвертого порогового элемента и первым входом пятого элемента И, второй вход которого соединен с выходом четвертого элемента а выход пятого элемента И соединен с выходом четвертого элемента И и является выходом блока определения наличия выбега, каждый блок попарного выбора содержит второй- элемент сравнения, второй элемент НЕ, ПЯТЫЙ и шестой пороговые элементы, шестой и седьмвй элементы И, первьгм входом блока попарного выбора являются соединенные первые входы второго элемента сравнения и седьмого элемента И, вторым входом блока попарногс
ми процессами, в него введены усилитель, блок возведения в квадрат, сумматор, п релейных элементов, п вьпслючателей, блок нахождения максимального выбега, п первых и п вторых элементов И, п элементов ИЛИ, в -орой и третий задатчики, причем выход задатчика номинального параметра нагрузки соединен с первыми входами всех релейных элементов, второй выход каждого релейного элемента соединен с входом соответствующего усилителя и соответствующего блока возведения в квадрат, выходы которых соединены с входами соответствующих сумматоров, причем тсыход п-го сумматора соединен с вторым входом п-го блока обнаружения выбега и с вторым входом п-го 9лока управления, а первьй выход каждого релейного элемента соединен с выходом того сумматора, к которому через усилитель и блок возведения в квадрат подключен второй , выход данного релейного элемента, вы50
ходы блоков обнаружения выбегов соединены с входами блока нахождения максимального выбега, каждый из входов которого соединен с входом соответствующего сигнального элемента, с вторым входом соответствукТщего первого элемента И и с одним из входов (n-l)-ro из п элементов ИЛИ, кроме элемента ИЛИ, .соответствующего первому элементу И, к которому подключен данный выход блока нахождения максимального выбега, выход каждого
О
элемента ИЛИ соединен с вторым входом соответствующего второго элемента И, первьй вход всех вторых элементов И соединен с выходом третьего за датчика, выход второго задатчика соединен с первым входом всех первых элементов,И и входом в(ех выключателей, выход каждого из которых соединен с вторым входом соответствующего релейного элемента, выходами одного соответствующего первого элемента И
элемента И.
Л
г:
I г-1°г
igHg
k ®
| Способ формирования управляющего воздействия | 1972 |
|
SU484500A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для механизированной сборки электровакуумных приборов | 1968 |
|
SU249485A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
