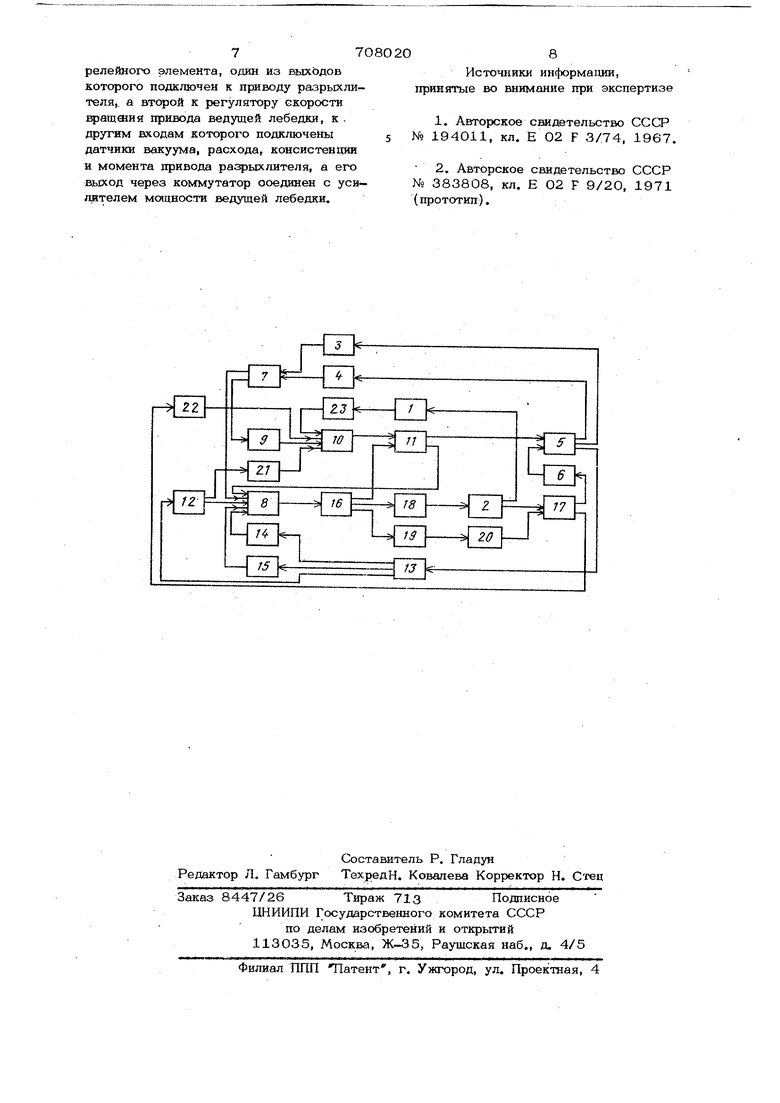
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗЕМСНАРЯДОМ 37 лителем мощности ведомой лебедки через сумматор ведущей лебедки. Это устройство в условиях разработки грунтов высокой категории работает неудовлетворительно по следующим причинам, По мере приближения земснаряда к бровке прорези угол между направлением троса ведущей лебедки и осью разрабатываемой прорези увеличивается. При ускорении поворота земснаряда, вызванного изменением геометрии многоуголь ника земснарядг-трсс-береговое крепле ние и переменным радиусом лебедки, силы сопротивления движению земснаряда непроизводительны, двигатели разрыхлителя и ведущей лебедки перегружаются, а содержание грунта в пульпе ниже установленного значения. Автоматическое увеличение скорости папиль нирования земснаряда на участках, соот ветствующих большим углам поворота, при его работе на трудноразрабатывае- мых грунтах приводит к ныталкиЕ{аншо фрезы из грунта и перекатыванию ее вхолостую по поверхности, разрушаемого массиваJ В этих условиях происходит недобор грунта у бровки прорези. Угловое возмущение вызывает отклонение фактического значения скорости поворот от заданного ее значения, то есть возмущение обуславливает ощибку регулирования. Целью настоящего изобретения является повыщение производительности земснаряда на участках больших углов поворота земснаряда относительно оси прорези и улучшение качества регулиро вания. Указанная цель достигается тем, чт устройство снабжено логическими элементами И и НЕ, двумя элементами сравнения, релейным элементом, регулятором скорости вращения привода ведущей лебедки и датчиками расхода, вакуума, консистенции и утла поворота платформы, причем ко входу логическог элемента И подключены через элементы сравнения датчики токовой нагрузки и момента разрыхлителя, через логически элемент НЕ - выход датчика консистен 1ши и непосредственно датчик угла поворота платформы, а выход логического элемента соединен со входом релейного элемента, один из выходов которого подключен к приводу разрыхлителя а второй к регулятору скорости вращеВИЯ привода ведущей лебедки, к другим 0 входам которого подключены датчики вакуума, расхода, консистенции и McyvieHта привода разрыхлителя, а его выход через коммутатор соединен с усилителем мощности ведущей лебедки. Изобретение поясняется чертежом, где изображена схема предложенного устройства. Устройство для управления землесосным снарядом содержит датчик 1 токовой нагрузки двигателя 2 ведущей лебедки, датчик мощности 3 и скорости 4 привода 5 механического разрыхлителя 6. К датчикам мощности 3 и скорости 4 подключен блок 7 определения момента привода 5. Выход блока 7 соединен со входом регуляачэра 8 скорости ращения фивода ведущей лебедки, второй выход которого через сравнивающее устройство 9 связан с логическим блоком 10. Последний с помощью релейного элемента 11 управляет двухскоростным двигателем 5. Релейный элемент 11 имеет электрическую связь со входом регулятора 8. Измеритель консистеншш 12, установленный на напорном трубопроводе грунтонасоса 13, расходомер 14, расположенный там же, датчик вакуума 15, измеряющий вакуумметрическую высоту всасывания грунтонасоса 13, соединены с регулятором 8, предназначенным для формирования управляющих воздействий, подаваемых через коммутатор 16 на входы исполнительных устройств. Исполнительные устройства, перемещающие платформу земснаряда 17 с устано.вленНым на ней механическим разрыхлителем 6, состоит из усилителей мощности 18, 19 и приводов лебедок 2 и 20. Измеритель консистеншш 12, блок 10 и логический элемент 21 выполняют операцию включения электродвигателя «. 5 разрыхлителя 6, Датчик 22 угла повсх рота платформы земснаряда 17 относительно оси прорези является одним из входов блока 1О. Элемент сравнения 23 задает допустимое значение токовой нагрузки привода ведущей лебедки. Устройство работает следующим образом. Перед началом очередной заходки земснаряд находится в исходном положении. Коммутатор 16 устанавливает направление подачи управляющих команд согласно выбранному направлению перемещения. Информация, получаемая от консистомера 12, а также от датчиков момента разрыхлителя 7, вакуума 15, 57 расходомера J.4 передается в регулятор 8. Реализация закона управления сводится к стабилизации консистенции пульпы на зада ном уровне при оптимальньгх или близких к оптимальным значениях параметров расхода и вакуума, обеспечивающих пропускную способность гидротрапспортирую щей системы. При консистенции пульпы ниже заданного значения скорость вращения двигателя постоянного тока приводов 2 или 2 О (в зависимости от выбранного направления заходки) и скорост перемещения земснаряда увеличиваются. Механический разрыхлитель 6 и его при водной двигатель 5 нагружаются, консистенция пульпы повышается. При дости жении заданной консистенции скорость папильонирования устанавливается постоянной, при увеличении заданного уровня консистеншш скорость перемещения платформы земснаряда 17 снижается. Контур, составленный из элементов 3, 4, 7, 9, 1О,11,. 21, 22, 23, предназначен для компенсации угловых возмущений, действие которых проявляется с увеличением угла поворота земснаряда по отношению к оси прорези. При достижении предельного значения токовой нагрузки дш1гателя 2 ведущей лебедки выходной сигнал с датчика 1 через сравнивающее устройство 23 поступает на вход логического блока 1О, выполняю щего функцию И. Ко второму входу схемы И подключен выход сравнивающег устройства 9, связанного с датчиком момента 7. С увеличением угла поворот земснаряда, ускоряемого датчиком 22, возникает снятие грунта и сопутствующее ему увеличение до максимума токовой нагрузки двигателя 2 ведущей лебедки и момента привода разрыхлител без повышения консистенции пульпы. При уровне сигнала на вьLxoдe измерителя 12 консистенции, снабженного уси- . лительло-сравнивающим устройством, ниже заданного логический элемент 21, выполняющий функцию НЕ, подает на вхо блока 10 -напряжение управления. Сигнал на вькоде логического блока И появляется при наличии сигналов на всех четырех входах. Релейный элемент 11, включенный в выходную цепь блока 10, перектцочает обмотки статора двух- скоростного двигателя 5. Переключение обмоток статора, осуществляемое устройством только при подходе к бровке прорези, вызывает уменьшение числа оборотов механического разрыхлителя 0 С одновременнь м увеличением критического момента приводного элекродви- гателя. Существует .оптимальное соотношение между скоростью земснаряда, скоростью вращения фрезы механического разрыхлителя и параметрами грунтозабора. Поэтому релейный элемент 11Одновременно уменьшает величзшу задания регулятору 8, в результате чего снижается скорость перемещения земснаряда. После обесточквания элемента 11 устройство в целом возвращается в исходное положение. Необходимым условием для этого является изменение направления заходки, при этом по команде коммутатора 16 отключается релейный элемент 11. Устройство для управления землесосным снарядом, оборудованное механическим разрыхлителем с двухскоростным приводом, в 1,5-2 раза снижает момент сопротивления перемещению земснаряда при больших углах поворота относительно оси прорези, исключает возможность перекатывания фрезы по грунту. За счет этого достигается устойчивость системы управления поворотом земснаряда, повышается качество регулирования технологического процесса, уменьшается недобор грунта у бровки прорези. Фо.рмула изобретения Устройство для управления замена- рядсад с механическим разрыхлителем, содержащее привод разрыхлителя, ведущей и ведомой лебедок с усилителями мощности, датчики момента и скорости разрыхлителя и коммутатор, отличающееся тем, что, с целью поЕЬ1шения производительности земснаряда на участках больших углов поворота земснаряда относительно оси прорези и улучшения качества регулирования, оно снабжено логическими элементами И и НЕ, двумя элементами сравнения, релейным элементом, регулятором скорости вращения привода ведущей лебедки и датчиками расхода, вакуума, консистенции и угла поворота платформы, причем ко входу логического элемента И подключены через элементы сравнения датчики токовой нагрузки и момента разрыхлителя, через логический элемент НЕ - выход датчика консистенции и непосредственно датчик угла поворота платформы, а выход лоrjroecKoro элемента соединен со входом релейного элемента, один из выходов которого подключен к приводу разрыхлителя, а второй к регулятору скорости щ)ащший привода ведущей лебедки, к . другим входам которого подключены датчики вакуума, расхода, консистенции и момента привода разрыхлителя, а его выход через коммутатор соединен с усилителем мощности ведущей лебедки. 7 8 Источники информашш, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 194011, кл. Е 02 F 3/74, 1967. 2.Авторское свидетельство СССР № 383808, кл. Е О2 F 9/20, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ | 1967 |
|
SU199007A1 |
| Устройство для управления процессом грунтозабора землесосного снаряда | 1988 |
|
SU1555434A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ, ОБОРУДОВАННЫМ МЕХАНИЧЕСКИМ РАЗРЫХЛИТЕЛЕМ | 1973 |
|
SU383808A1 |
| Система для управляемого обрушения забоев земснарядом | 1988 |
|
SU1587142A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЛАВУЧИМ ЗЕМЛЕСОСНЫМСНАРЯДОМ | 1972 |
|
SU340746A1 |
| Система для управляемого обрушения подводных забоев земснарядом | 1990 |
|
SU1789608A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ГИДРОТРАНСПОРТИРОВАНИЯ | 1973 |
|
SU383798A1 |
,г
