CD
со
CD
Изобретение относится к механическим передачам и может быть использовано в передаточных механизмах силовых и кинематических приводов с возвратно-поступательным движением винта.
Цель изобретения - расширение кинематических возможностей за счет регулирования скорости винта.
На фиг. 1 представлен предлагаемый механизм; на фиг. 2 - сечение А-А на фиг 1; на фиг. 3 - механизм с автоматическим регулированием скорости винта в зависимости от нагрузки.
Планетарно-винтовой механизм (фиг. 1) содержит корпус 1, жестко связанное с ним центральное колесо 2 с зубьями в виде конических роликов 3, зацепляющийся с ним сателлит 4 с зубьями 5 прямолинейного профиля. Последний получает прецессионное движение от кривошипа 6, жестко связанного с полым ведущим валом 7. На внутренней поверхности ступицы сателлита 4 выполнены осевые пазы 8, в которых размещены тела 9 качения. Последний одновременно установлены в гнездах, выполненных на гайке 10, зацепляющейся с вилтом 11. Гайка 10 связана с устройством осевого перемещения, выполненным в виде полого диска 12 и наружной резьбовой обоймы 13. Фланец 14 гайки 10 размещен на телах 15 качения в полости диска 12. Устройств(3 осевого переме1цения гайки связано с корпусом 1 путем размещения тел 16 качения в осевых пазах 17, выполненных в корпусе 1, и в винтовой канавке 18, выполненной на внутренней поверхности обоймы 13.
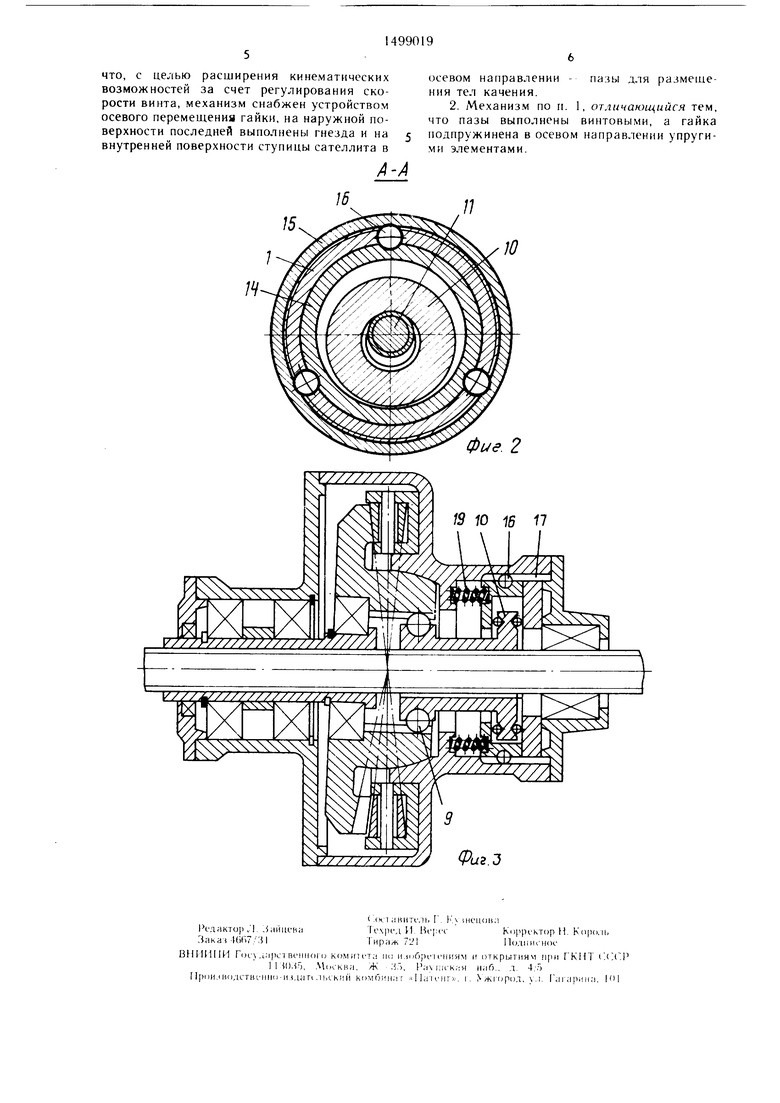
Устройство осевого перемешения гайки может быть выполнено и в виде одног с) диска 12 (фиг. 3), связанного непосредственно с корпусом 1 телами 16 качения. При этом пазы 17 выполнены винтовыми, а гайка 10 подпружинена в осевом направлении пружинами 19.
Планетарно-винтовой механизм работает следуюшим образом.
Вращение от ведущего вала 7 посредством кривошипа 6 преобразуется в про- цессионное движение сателлита 4. В результате зацепления зубьев 5 сателлита 4 с роликами 3 колеса 2 сателлит 4 вращается с редукцией
соответственно число роли- 5. При этом гайка 10, разгде Z:i и Zfi - ков 3 и зубьев метенная в стпице сателлита 4, совершает планетарное движение вокруг оси винта 1 1 с частотой, равной числу оборотов ведущепз вала 7, а также вращательное движение вокруг оси винта 1 1 с редуцированной частотой вращения сателлита 4. Осевое перемещение винта I 1 состоит из двух составляющих: осевое перемещение от планетарного движения гайки с частотой toi и осевое пере
мещение от вращения гайки с часто ой coi/i i. Если планетарное движение гайки 10 и ее вращательное движение вокруг своей оси противоположны, то суммарная осевая скорость определяется из выражения
V K«-VW,
где Упя и - скорость осевого перемещения винта 11 соответственно от планетарного движения и вращения вокруг своей оси гайки 10.
Изменение скорости осевого перемещения достигается путем вращения обоймы 13. При этом тела 16 качения, размещенные в винтовой канавке 18, перемещаются в осевом направлении в пазах 17, вызывая тем самым осевое перемещение диска 12, а следовательно, и гайки 10. При осевом перемещении гайки 10 на некоторую величину а эксцентриситет планетарного движения гайки 10, а следовательно, и ее текущий ра- дис р2 уменьшатся на величину где 7 - угол прецессии сателлита 4. А это вызывает изменение передаточного отноще- ния между винтом 1 1 и гайкой 10, т. е
0
5
0
5
0
5
12
Л
Р2 -Де
При перемещении гайки 10 досовмещения ее средней плоскости с центром прецессии прецессионного колеса винт 11 получает осевое перемещение только от вращения гайки 10 вокруг своей оси, поскольку в центре прецессии отсутствует планетарное движение точек сателлита 4.
При этом передача винт-гайка работает как соосная передача (если витки резьбы гайки не выщли из зацепления с витками резьбы винта) или не работает (если витки резьбы гайки 10 вышли из зацепления с витками резьбы винта 11).
В передаче по (фиг. 3) при достижении нагрузки на винте 11 определенной величины, соразмерной с усилием пружин 19 и сопротивлением преодоления угла наклона винтовых пазов 17, происходит автоматическое осевое перемещение гайки 10 в осевом направлении. Перемещение гайки в осевом направлении удерживается в этом положении до тех пор, пока нагрузка на винте не уменьшится.
Формула изобретения
1. Планетарно-винтовой механизм, содержащий корпус, две последовательно установленные передачи, первая из которых, прецессионная, включает центральное колесо, соединенное с корпусом, и сателлит, вторая, винтовая, включает имеющие резьбу с равным шагом винт и гайку, размещенную в ступице сателлита и связанную с ней посредством тел качения, отличающийся тем.
что, с целью расширения кинематических возможностей за счет регулирования скорости винта, механизм снабжен устройством осевого перемещения гайки, на наружной поверхности последней выполнены гнезда и на 5 внутренней поверхности ступицы сателлита в
-/4
осевом направлении - пазы для размещения тел качения.
2. Механизм по п. 1, отличающийся тем, что пазы выполнены винтовыми, а гайка подпружинена в осевом направлении упругими элементами.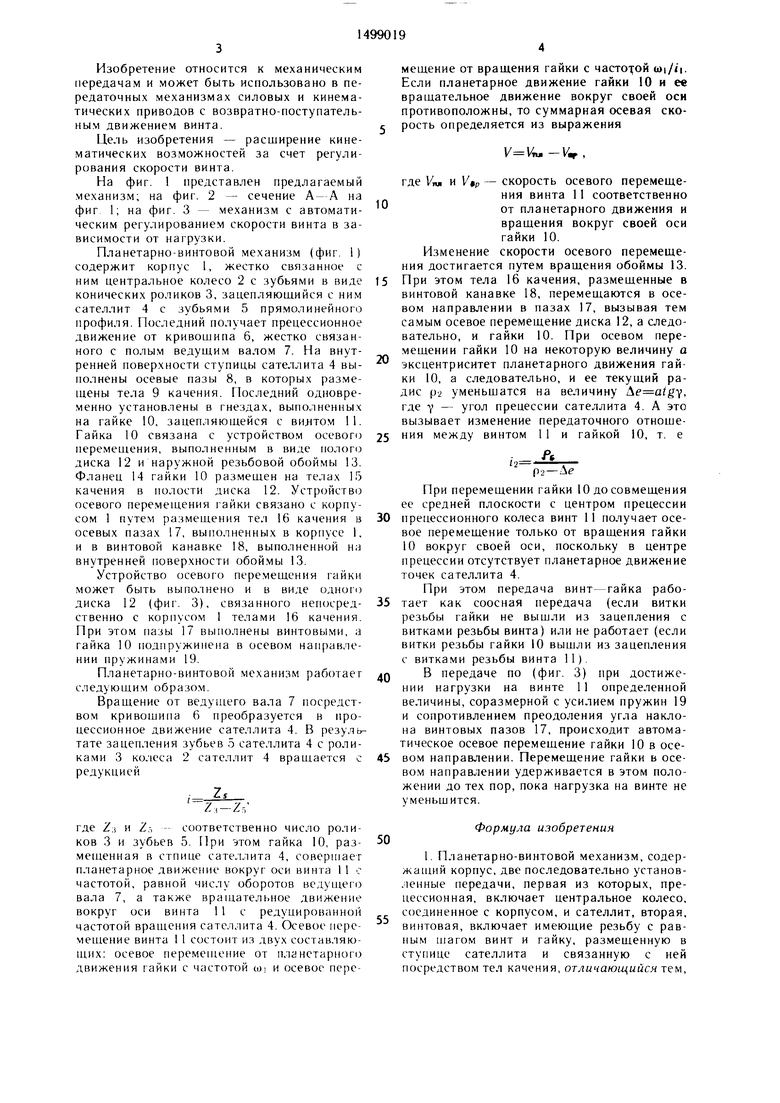
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Манипулятор | 1987 |
|
SU1465301A1 |
| Привод электромобиля | 1989 |
|
SU1724486A1 |
| Планетарная прецессионная передача | 1987 |
|
SU1474362A1 |
| Шарнир манипулятора | 1989 |
|
SU1771960A1 |
| Планетарный механизм | 1984 |
|
SU1218210A1 |
| Гайковерт | 1990 |
|
SU1727981A1 |
| ФРИКЦИОННЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 1995 |
|
RU2112900C1 |
| Планетарная передача винт-гайка качения | 1980 |
|
SU1036994A1 |
| Захват промышленного робота | 1988 |
|
SU1583285A1 |
Изобретение относится к машиностроению и предназначено для получения поступательных перемещений с различной редукцией. Цель изобретения - расширение кинематических возможностей за счет регулирования скорости винта. Планетарно-винтовой механизм содержит корпус 1, жестко связанное с ним центральное роликовое колесо 2, зацепляющееся с ним прецессионное колесо 3, в ступице которого размещена гайка 4. Последняя связана со ступицей посредством шариков 5, расположенных в пазах 6, выполненных на внутренней поверхности ступицы колеса 3. Гайка 4 зацепляется с винтом 7 и перемещается в осевом направлении устройством 8. Гайка совершает планетарное движение с частотой вращения ведущего вала 8 и вращается со скоростью, редуцированной в зубчато-роликовом зацеплении прецессионной передачи и, зацепляясь с винтом 7, заставляет последний перемещаться. Изменение передаточного отношения достигается перемещением гайки 4 в осевом направлении. 3 ил.
/5
Ю
Фиг.З
| Планетарный механизм | 1984 |
|
SU1218210A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
