Изобретение относится к робототехнике, а именно к микроианипуляторам с вибродвигателями.
Целью изобретения является повышение нагрузочной способности и расширение функциональных возможностей.
На фиг, 1 представлен шарнир манипулятора; на фиг. 2 показана синусная канава с пьезопрвобразователями.
Й1арни.р манипулятора содержит звено- корпус 1. вибродвигэтель в виде установленного неподвижно в корпусе 1 кольца 2, в котором по периметру размещены пьезоп- реобразователи 3. Внутри кольца 2 размещено кольцо 4, на наружной цилиндрической-поверхности 5 которого выполнена однопериодная синусная канавка 6. Кольцо 4 размещено в пазу на телах качения 7 между зубчатыми венцами 8 и 9 составного сателлита 10, которые зацепляются с зубьями центральных колес 11 и 12, связанных соответственно с корпусом 1 и со звеном 13 посредством муфты 14. Сателлит 10 и колеса 11 и 12 образуют дифференциальный механизм. В ступице сателлита 10 выполнены канавки 15, в которых размещены тела 16 качения, взаимодействующие одновременно с винтовыми канавками 17, выполненными на поверхности штока 18, связанного стопорным кольцом со звеном 13, а также скользящей шпонкой 19с корпу сом 1. Шток 18 и тела качения 16 образуют ишрико-винтовую передачу. Пьезопреобра- зователь 3 включает генераторы 20 поперечных и генераторы 21 продольных колебаний.
Шарнир манипулятора работает следующим образом
Генераторы 20 и 21 поперечных и продольных колебаний получают электрические сигналы и возбуждают сдвиговые колебания кольца 4. При этом в генераторе 20 возбуждаются поперечные колебания, а в генераторе 21 - продольные. Эти колебания имеют максимальную амплитуду напротив канавки 6. Одновременно локализация поперечных колебаний в области, расположенной над синусной канавкой, приводит к центрированию пьезопреобразователей 3 по траектории синусной канавки 6, т е. в процессе работы кроме вращения вокруг своей оси кольцо 4 получает осевые перемещения. Размещение кольца 4 между частями составного сателлита 10 на телах качения 7 обеспечивает в результате этого преобразование составляющих движения кольца 4 в прецессионное движение сателлита 10 (при этом амплитуда синусоиды синусной канавки б равна амплитуде прецессионного движения сателлита 10). В результате зацепления венцов 9 и 8 сателлиты 10 с зубьями центральных колес 11 и
12 последнее, а, следовательно, и звено 13 при включении муфты 14 будут вращаться с редукцией
IZQ Zi2
Zn Zio-ZgZi2
rfleZg, Zio число зубьев венцов 8 и 9 сателлита 10;
Zn, Zia - число зубьев центральных колес 11 и 12.
Сам сателлит 10 вращается вокруг
своей геометрической оси с редукцией Z9
12 Zn-Zg
Это редуцированное вращательное движение сателлита 10 превращается посредством тел каченмя 16 и винтовых канавок 17 в поступательное движение штока 18. Величина перемещения 5шт t nc, где t-шаг винтовой канавки; пс - число оборотов сателлита, Это перемещение передается звену 13.
Таким образом, звено 13 получает поступательное движение от того же привода, что и поворот вокруг своей оси.
Формула изобретения
Шарнир манипулятора, содержащий
звенья, в одном из которых размещен вибродвигатель, имеющий пьезопреобразова- тели, отличающийся тем, что с целью повышения нагрузочной способности и расширения функциональных возможностей, он снабжен кольцом с выполненной на его наружной поверхности синусной канавкой, шарико-винтовым механизмом и дифференциальным механизмом, центральные зубчаТые колеса которого связаны со звеньями, а сателлит имеет наружную канавку, в которой на опорах качения расположено кольцо, и внутренние канавки, в которых расположены шарики указанной передачи, винт ксторой связан с вторым звеном, при этом пьезопреобразователи расположены над синусной канавкой кольца.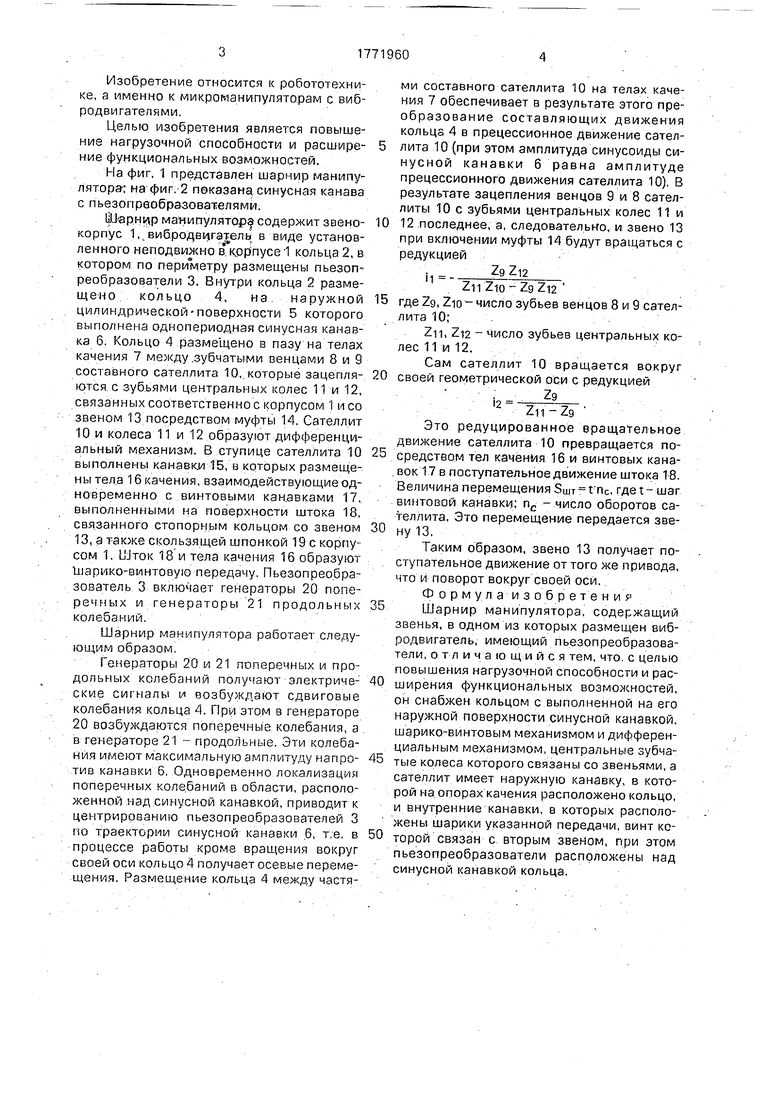
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод электромобиля | 1989 |
|
SU1724486A1 |
| Гайковерт | 1990 |
|
SU1727981A1 |
| Манипулятор | 1987 |
|
SU1465301A1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Устройство для преобразования тепловой энергии в механическую | 1989 |
|
SU1671956A1 |
| Планетарная прецессионная передача | 1976 |
|
SU734465A1 |
| Планетарная прецессионая передача | 1988 |
|
SU1753101A1 |
| Транспортное средство | 1990 |
|
SU1763267A1 |
| Привод арматуры | 1992 |
|
SU1807278A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2013 |
|
RU2552403C2 |
Изобретение относится к робототехнике, а именно микроманипуляторам с вибродвигателем. Целью изобретения является повышение нагрузочной способности и расширение функциональных возможностей. j 13 п w 5 г j о I I П I II а 8 1Б В7 При поступлении электрических сигналов на пьезопреобразователи 3 вращается и перемещается кольцо 4, на наружной поверхности которого выполнена однопериодная синусная канавка 5, расположенная напротив пьезопреобразователей, т.к. кольцо 4 размещено в канавке составного сателлита 10 дифференциального механизма. Эти перемещения передаются сателлиту Ю. превращаясь в прецессионное движение последнего. В результате зацепления венцов сателлита зубчатыми колесами 11 и 12 звено 13 получает вращательное движение. а от взаимодействия тел качения 16 с винтовыми канавками 17 штока 18 - поступательное перемещение, т.к. это звено связано со штоком, 2 ил. (Л С 7 J XI ч Ю О а Фиг.
| Искусственная мышца | 1989 |
|
SU1673425A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Бансявичюс Р.Ю, и др | |||
| Вибродьигатели | |||
| Вильнюс, Мокслас, 1981, с.182, р.6.24 | |||
