сд
о
о
4
00
Изобретение относится к машиностроению и может быть использовано в роботизированных комплексах листовой штамповки, а также в производ- ствах, связанных с поштучной выдачей плоских предметов из стопы.
Цель изобретения - повышение удобств эксплуатации.
На чертеже изображено предлагае- мое устройство.
Устройство содержит емкость 1 с жидкостью, размещенный в ней подъемно-опускной стол 2 под стопу 3 дета- ле, вьшолненный в виде поплавка 4, и средство регулирования уровня жидкости в емкости, выполненное в виде резервуара 5, сообщающегося с емкостью и кинематически связанного с приводом 6 поворота и приводом 7 вертикального перемещения.
Устройство работает следующим образом.
При настройке устройства для позиционирования под определенный типоразмер детали стопа 3 деталей размещается на столе 2, Поплавок 4 стол погружается в жидкость, при этом верхний край стопы 3 деталей занимает какое-либо произвольное поло- жение, В соответствии с весом и толщиной детали устанавливаем угол поворота резервуара, определяемьш из математической зависимости:
.
arcos
Sn G - S(G t.)
де c S,
угол поворота резервуара; площадь поперечного сечения резервуара;
площадь горизонтального сечения поплавка; площадь горизонтального сечения емкости с жидкостью; толщина одной детали; вес одной детали; удельный вес жидкости. Угол устанавливается.посредством ривода 6, Затем, изменяя высоту
S,. S. SСг Р
45
5 0
0
5
5
5
установки резервуара 5 не изменяя угла поворота относительно емкости 1 при помощи привода 7, устанавливают стопу деталей на уровень позицо- нирования,
Приводы поворота 6 и вертикального Перемещения 7 могут быть выполнены, например, в виде винтов и шарниров либо гидравлическими, механическими и .т.д.
В процессе работы устройства при взятии верхней детали из стопы 3 поплавок 4 всплывает и поднимает стопу 3 на высоту, равную толщине взятого предмета, т.е, происходит самопозиционирование верхней детали за счет того, что при настройке обеспечена необходимая площадь поверхности жидкости для данного типоразмера детали. При этом уровень позиционирования поддерживается автоматически при поштучном съеме деталей со стопы. По мере взятия очередных предметов из стопы 3 процесс самопозиционирования повторяется до снятия последней детали. Процесс самопозиционирования происходит как при разгрузке, так и при загрузке стопы 3. I
При изменении типоразмера детали процесс настройки повторяется,
Формулаизобретения
Устройство для позиционирования стопы деталей, содержащее емкость с жидкостью, размещенный в ней подъемно-опускной стол ПОД-стопу, выполненный в виде поплавка, средство для регулирования уровня жидкости в емкости, выполненное, в виде резервуара, сообщающегося с емкостью, отличающееся тем, что, с целью повышения удобства эксплуатации резервуар снабжен кинематически связанными с ним.приводом подъема- опускания и приводом его поворота в вертикальной плос{сЬсти,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования стопы деталей | 1980 |
|
SU1038019A1 |
| Устройство для позиционирования стопы деталей | 1988 |
|
SU1590171A1 |
| Устройство для поштучной подачи плоских изделий | 1983 |
|
SU1139685A1 |
| Устройство для позиционирования стопы деталей | 1980 |
|
SU1147484A1 |
| Устройство для позиционирования стопы деталей | 1980 |
|
SU1247134A1 |
| Устройство для поштучной выдачи плоских деталей | 1984 |
|
SU1315088A1 |
| Устройство для укладки заготовок | 1982 |
|
SU1038024A1 |
| Установка для многономенклатурной штамповки полосового материала | 1989 |
|
SU1682019A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для розлива жидкостей | 1985 |
|
SU1279949A1 |
Изобретение относится к машиностроению и может быть использовано в роботизированных комплексах листовой штамповки, а также в установках, связанных с поштучной выдачей плоских предметов из стопы. Цель - повышение удобства эксплуатации. Устройство содержит емкость 1 с жидкостью, подъемно-опускной стол 2, выполненный в виде поплавка 4 со стопой деталей 3, резервуар 5 с механизмом поворота 6 и приводом подъема-опускания 7. Детали загружаются на подъемно-опускной стол 2. При этом поплавок 4 погружается в жидкость. Для настройки на режим самопозиционирования резервуар 5 поворачивают на угол α, который зависит от габаритов и массы детали и соотношения площадей поперечных сечений поплавка 4, емкости 1 и резервуара 5. Процесс самопозиционирования поддерживается автоматически при выгрузке (загрузке) деталей из стопы в стопу. 1 ил.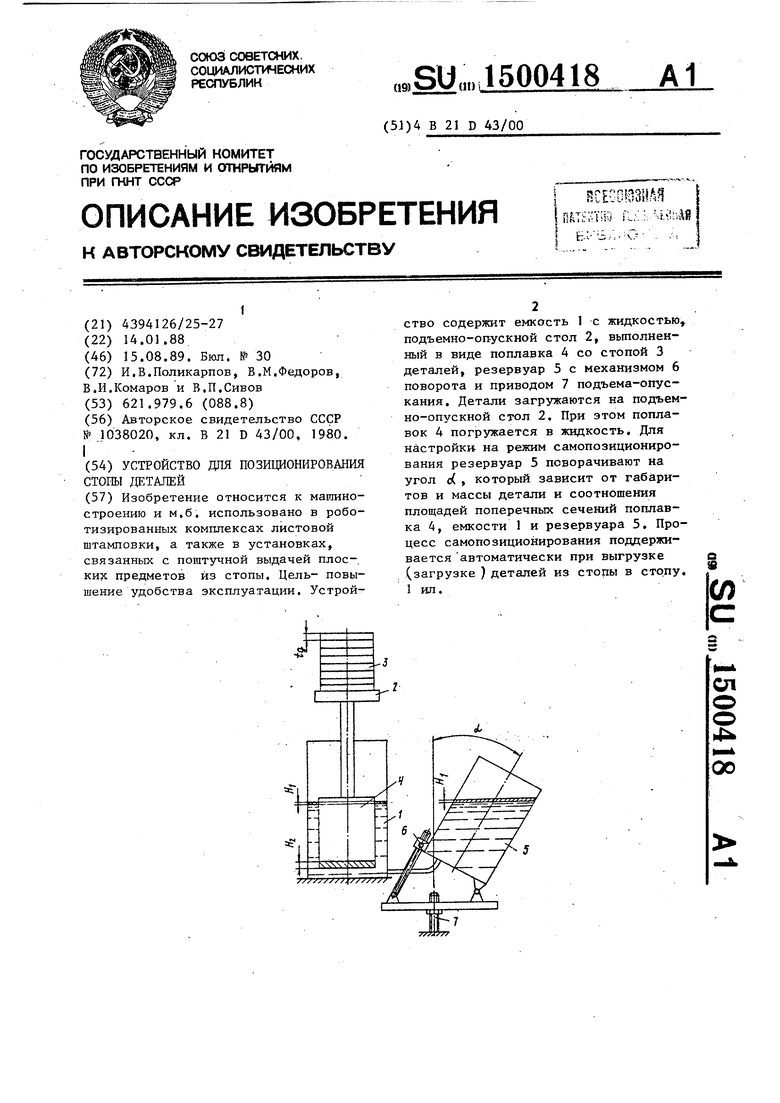
| Устройство для позиционирования стопы деталей | 1980 |
|
SU1038020A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| I | |||
