6 17
////// / И Ю ft 9 а t5 27 26 Za 25 11 f 5 В I
фие.1
22 20
%
(Л
29
СП
о го
СХ)
31502
его поворота, шарнирно связанным с ВУ 4 и вьтолненным в виде телескопического рьгчага (ТР) 14 и вилки 15. При этом ТР 14 содержит гильзу 24 с размещенной внутри нее тягой 23, имеющей на одном конце фланец 26, взаимодействующий через пружины 27 и 28 сжатия с торцами гильзы 24, другим концом шарнирно связанной с ВУ 4. Механизм 4 перемещения ВУ имеет штурвал 30 с Т-образными спицами, взаимодействующими с злементом ручного расторможения - рычагом 11. При расцеплении (сцеплении) грузоненесу- щей тележки 3 с тяговой цепью 2 поворотом винта 29 с помощью штурвала 30 ВУ 4 вьгаодится (вводится) из взаимодействия с шарниром 5 тяговой цепи 2. Тяга 25 поднимается и своим фланцем 26 сжимает пружину 28, которая, опираясь одним концом во фланец 26, а другим - в торец гильзы 24, перемещает через рамку 12 колодки 6 в направлении к колесам 7 и 8, производя торможение. Поворачиваясь вокруг оси 16, ТР 14 подводит штифт 23 до соприкосновения с вилкой 15, При дальнейшем повороте ТР 14 вместе с вилкой 15 под действием пружины 19 начинает поворачиваться УК 13. При крайнем верхнем положении ВУ 4 выходит из взаимодействия с тяговой цепью 2 и занимает горизонтальное положение УК 13. 1 з.п.ф-лы, 4 ил.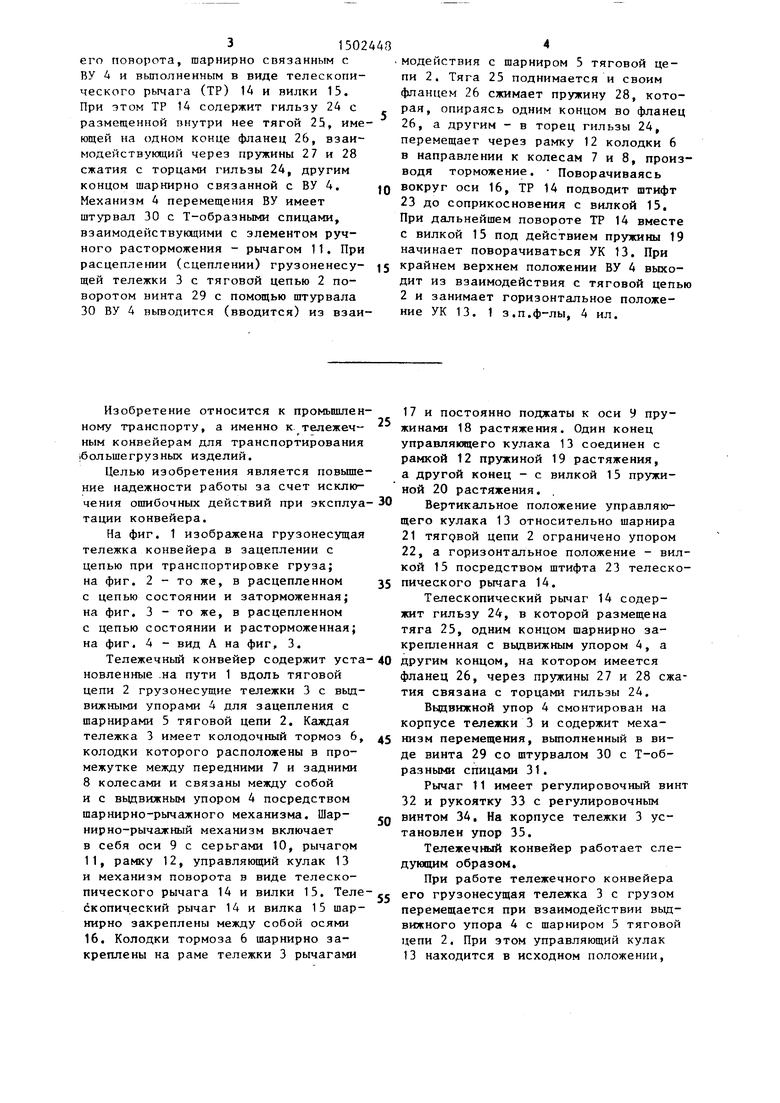
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1980 |
|
SU939343A1 |
| Тележечный конвейер для транспортирования большегрузых изделий | 1978 |
|
SU732174A1 |
| Тележечный конвейер | 1987 |
|
SU1447718A1 |
| Вертикально-замкнутый тележечный конвейер | 1985 |
|
SU1265102A1 |
| Тележечный конвейер | 1986 |
|
SU1368233A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Напольный тележечный конвейер | 1982 |
|
SU1022884A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Тележечный конвейер | 1983 |
|
SU1131780A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |

Изобретение относится к промышленному транспорту, а именно к тележечным конвейерам для транспортирования большегрузных изделий, и позволяет повысить надежность работы за счет исключения ошибочных действий при эксплуатации конвейера. Тележечный конвейер 1 имеет тяговую цепь 2 и грузонесущие тележки 3 с выдвижными упорами (ВУ) 4. Управляющий кулак (УК) 13 снабжен механизмом его поворота, шарнирно связанным с ВУ 4 и выполненным в виде телескопического рычага (ТР) 14 и вилки 15. При этом ТР 14 содержит гильзу 24 с размещенной внутри нее тягой 25, имеющей на одном конце фланец 26, взаимодействующий через пружины сжатия 27 и 28 с торцами гильзы 24, другим концом шарнирно связанной с ВУ 4. Механизм перемещения ВУ 4 имеет штурвал 30 с Т-образными спицами, взаимодействующими с элементом ручного расторможения - рычагом 11. При расцеплении (сцеплении) грузонесущей тележки 3 с тяговой цепью 2 поворотом винта 29 с помощью штурвала 30 ВУ 4 выводится (вводится) из взаимодействия с шарниром 5 тяговой цепи 2. Тяга 25 поднимается и своим фланцем 26 сжимает пружину 28, которая, опираясь одним концом во фланец 26, а другим - в торец гильзы 24, перемещает через рамку 12 колодки 6 в направлении к колесам 7 и 8, производя торможение. Поворачиваясь вокруг оси 16, ТР 14 подводит штифт 23 до соприкосновения с вилкой 15. При дальнейшем повороте ТР 14 вместе с вилкой 15 под действием пружины 19 начинает поворачиваться УК 13. При крайнем верхнем положении ВУ 4 выходит из взаимодействия с тяговой цепью 2 и занимает горизонтальное положение УК 13. 1 з.п.ф-лы, 4 ил.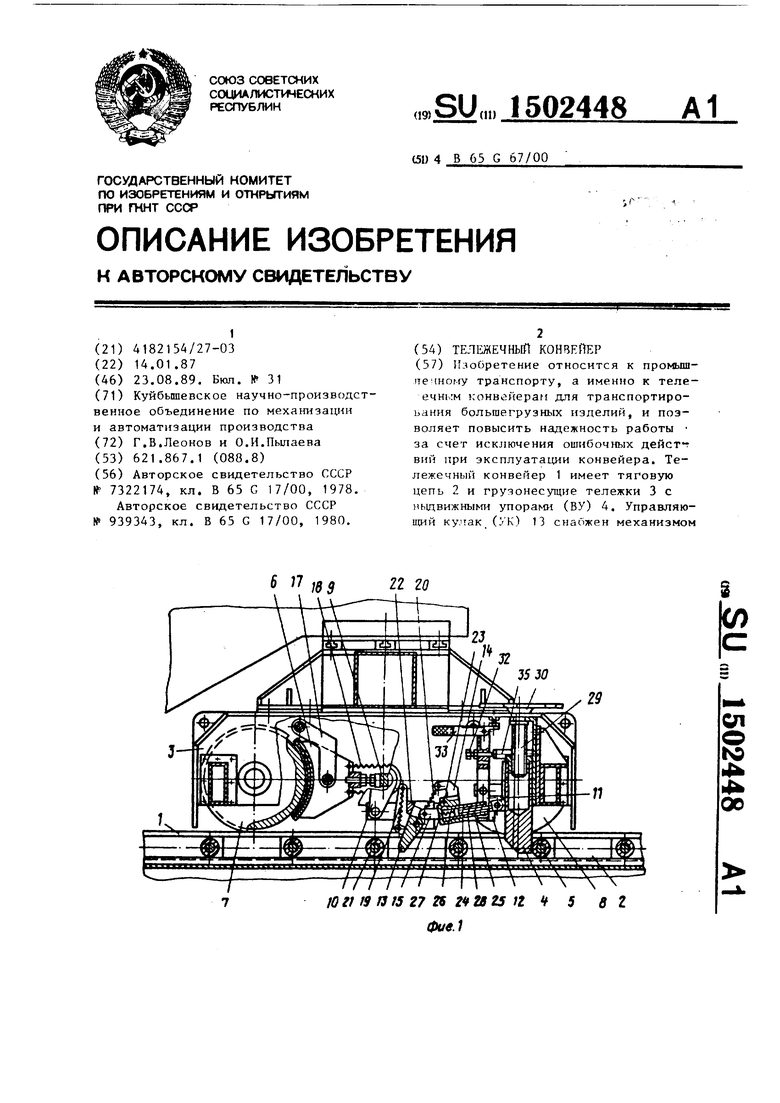
Изобретение относится к промьшшен- ному транспорту, а именно к. тележеч- ным конвейерам для транспортирования большегрузных изделий.
Целью изобретения является повьппе- ние надежности работы за счет исключения ошибочных действий при эксплуатации конвейера.
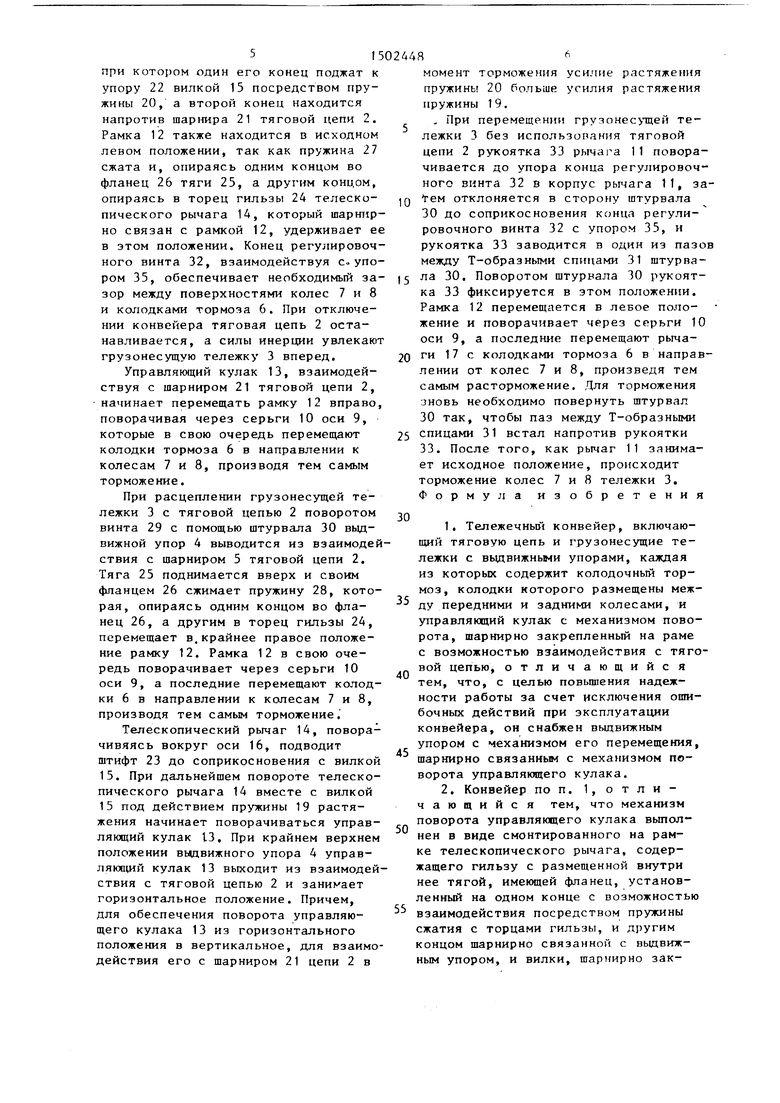
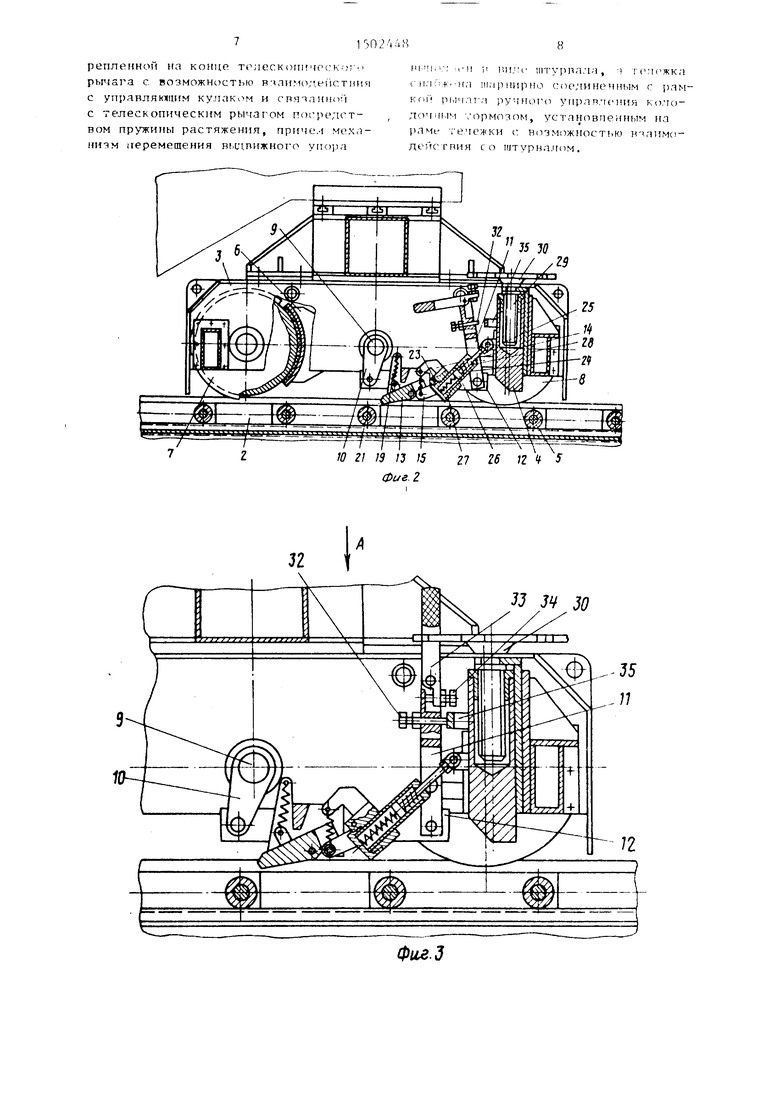
На фиг. 1 изображена грузонесущая тележка конвейера в зацеплении с цепью при транспортировке груза; на фиг. 2 - то же, в расцепленном с цепью состоянии и заторможенная; на фиг. 3 - то же, в расцепленном с цепью состоянии и расторможенная; на фиг. 4 - вид А на фиг, 3.
Тележечный конвейер содержит установленные .на пути 1 вдоль тяговой цепи 2 грузонесущие тележки 3 с выдвижными упорами 4 для зацепления с шарнирами 5 тяговой цепи 2. Каждая тележка 3 имеет колодочный тормоз 6, колодки которого расположены в промежутке между передними 7 и задними 8 колесами и связаны между собой и с вьщвижным упором 4 посредством шарнирно-рычажного механизма. Шарнир но-рычажный механизм включает в себя оси 9 с серьгами 10, рычагом 11, рамку 12, управляющий кулак 13 и механизм поворота в виде телескопического рычага 14 и вилки 15. Телескопический рычаг 14 и вилка 15 шарнирно закреплены между собой осями 16. Колодки тормоза 6 шарнирно закреплены на раме тележки 3 рычагами
17 и постоянно поджаты к оси У пружинами 18 растяжения. Один конец управляющего кулака 13 соединен с рамкой 12 пружиной 19 растяжения, а другой конец - с вилкой 15 пружиной 20 растяжения.
0 Вертикальное положение управляющего кулака 13 относительно шарнира 21 тягрвой цепи 2 ограничено упором 22, а горизонтальное положение - вилкой 15 посредством штифта 23 телеско5 пического рычага 14.
Телескопический рычаг 14 содержит гильзу 24, в которой размещена тяга 25, одним концом шарнирно закрепленная с выдвижным упором 4, а
0 другим концом, на котором имеется фланец 26, через пружины 27 и 28 сжатия связана с торцами гильзы 24.
Вьщвижиой упор 4 смонтирован на корпусе тележки 3 и содержит меха5 низм перемещения, вьшолненный в виде винта 29 со штурвалом 30 с Т-образными спицами 31.
Рычаг 11 имеет регулировочный винт 32 и рукоятку 33 с регулировочным
Q винтом 34, На корпусе тележки 3 установлен упор 35.
Тележечный конвейер работает следующим образом.
При работе тележечного конвейера
5 его грузонесущая тележка 3 с грузом перемещается при взаимодействии выдвижного упора 4 с шарниром 5 тяговой цепи 2. При зтом управляющий кулак 13 находится в исходном положении,
при котором один его конец поджат к упору 22 вилкой 15 посредством пружины 20, а второй конец находится напротив шарнира 21 тяговой цепи 2. Рамка 12 также находится в исходном левом положении, так как пружина 27 сжата и, опираясь одним концом во фланец 26 тяги 25, а другим концом, опираясь в торец гильзы 24 телескопического рычага 14, который шарннр- но связан с рамкой 12, удерживает ее в этом положении. Конец регулировочного винта 32, взаимодействуя с упором 35, обеспечивает необходимый зазор между поверхностями колес 7 и 8 и колодками тормоза 6. При отключении конвейера тяговая цепь 2 останавливается, а силы инерции увлекают грузонесущую тележку 3 вперед.
Управляющий кулак 13, взаимодействуя с шарниром 21 тяговой цепи 2, начинает перемещать рамку 12 вправо, поворачивая через серьги 10 оси 9, которые в свою очередь перемещают колодки тормоза 6 в направлении к колесам 7 и 8, производя тем самым торможение.
При расцеплении грузонесущей тележки 3 с тяговой цепью 2 поворотом винта 29 с помощью штурвала 30 выдвижной упор 4 выводится из взаимодействия с шарниром 5 тяговой цепи 2. Тяга 25 поднимается вверх и своим фланцем 26 сжимает пружину 28, которая, опираясь одним концом во фланец 26, а другим в торец гильзы 24, перемещает в.крайнее правое положение рамку 12. Рамка 12 в свою очередь поворачивает через серьги 10 оси 9, а последние перемещают колодки 6 в направлении к колесам 7 и 8, производя тем самым торможение.
Телескопический рычаг 14, повора- чивяясь вокруг оси 16, подводит штифт 23 до соприкосновения с вилкой 15. При дальнейшем повороте телескопического рычага 14 вместе с вилкой 15 под действием пружины 19 растяжения начинает поворачиваться управляющий кулак 13. При крайнем верхнем положении вьвдвижного упора 4 управ- ляюпщй кулак 13 выходит из взаимодействия с тяговой цепью 2 и занимает горизонтальное положение. Причем, для обеспечения поворота управляющего кулака 13 из горизонтального положения в вертикальное, для взаимодействия его с шарниром 21 цепи 2 в
0
момент торможения усилие растяжения пружины 20 больше усилия растяжения пружины 19.
, При перемещении грузонес тцей тележки 3 без использопания тяговой цепи 2 рукоятка 33 рычага 11 поворачивается до упора конца регулировочного винта 32 в корпус 11, за- YBM отклоняется в сторону штурвала 30 до соприкосновения конца регулировочного винта 32 с упором 35, и рукоятка 33 заводится в один из пазов между Т-образными спицами 31 штурва- 5 ла 30. Поворотом штурвала 30 рукоятка 33 фиксируется в этом положении. Рамка 12 перемещается в левое положение и поворачивает через серьги 10 оси 9, а последние перемещают рычаги 1 7 с колодками тормоза 6 в направлении от колес 7 и 8, произведя тем самым расторможение. Для торможения зновь необходимо повернуть штурвал 30 так, чтобы паз между Т-образными спицами 31 встал напротив рукоятки 33. После того, как рьмаг 11 занимает исходное положение, происходит торможение колес 7 и 8 тележки 3. Формула изобретения
0
5
0
5
0
5
0
5
Ю 21 19 ;3 /5 фиг. 2
fii i iiv: ;, ii и 1.и, Н ттурпала, темсжка с ii,-i;: + . na тар iinpHi.1 сое;1инеиным г рам- рычлтм ручисм о упрлр. к иия коло- ЛОЧЧ1.1М -ормозом, установпекным на раме тележки с. В1гзможностью вчаимо- дейс гвия со 1итурва. .
J5 10
П Т,// /25
11 26 12 f f
J JV JO
Фиг.З
ЮJ5
ВидА Д4
гг 7 К
23 75 / «
-f-ь
Т
Физ.
| Авторское свидетельство СССР № 7322174, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Тележечный конвейер | 1980 |
|
SU939343A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
