Изобретение относится к машиностроению, а именно к шарнирно-рычажным направляющим механизмам, и найдет применение в различных устройствах, где требуется циклическое перемещение ведомого звена по прямолинейной или различным криволинейным траекториям.
Цель изобретения - расширение кинематических возможностей механизма за счет создания возможности перемещения ведомонении для связи звеньев механизма цилиндрических шарниров механизм плоский, а при применении сферических шарниров - пространственный.
Механизм работает следующим образом.
При сообщении от привода (не показан) ведущему камню 4 возвратно-поступательного перемещения по направляющей 8 (фиг. 1) или кругового перемещения от кривошипа 9 (фиг. 2) камень 4 перемего звена по различным видам траекторий Ю щается по соответствующему плечу кулис различными соотношениями длин траекторий ведущего и ведомого звеньев.
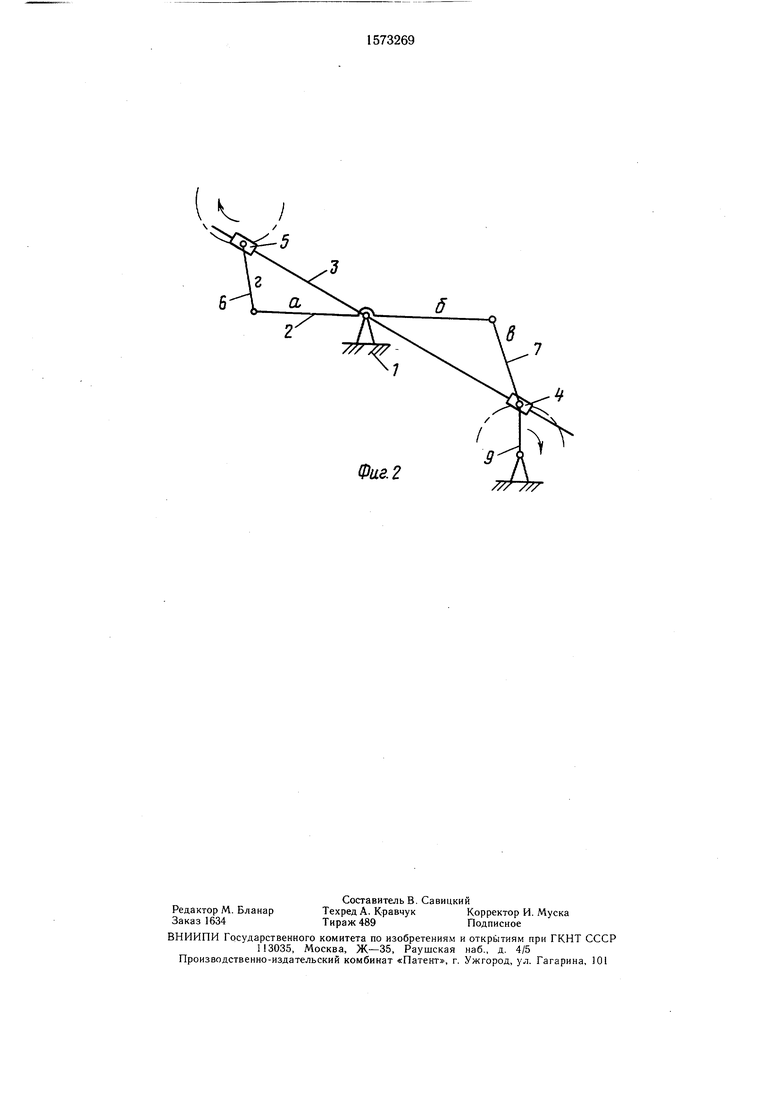
На фиг. 1 показана кинематическая схема механизма с прямолинейной траекторией движения ведомого звена; на фиг. 2 - то же, с круговой траекторией.
Механизм содержит основание 1 и установленные на нем двуплечие коромысло 2 и кулису 3. На одном плече кулисы 3 установлен ведущий камень 4, а на другом -
сы 3 и сообщает ей колебательное движение вокруг шарнира, связывающего кулису 3 с основанием 1. Одновременно через шатун 7 камень 4 приводит в коле- 15 бательное движение вокруг того же шарнира и коромысло 2, которое через шатун 6 перемещает вдоль соответствующего плеча кулисы 3 ведомый камень 5. Совокупное движение камня 5 вдоль кулисы 3 и вместе с нею происходит по траектории, подобведомый камень 5. Плечо а коромысла 2 шар- 20 Hog траектории перемещения ведущего кам25
нирно связано с ведомым камнем 5 через шатун б, а плечо б шарнирно связано с ведущим ползуном через шатун 7, при этом длина шатуна 6 равна величине г, а длина шатуна 7 равна величине в.
Ведущий камень 4 кинематически связан с основанием 1 с возможностью перемещения по различным требуемым траекториям, форма которой определяется видом кинематической связи. Ведомъш камень 5 воспроизводит ту же траекторию, но в масштабе, определяемом соотношением М -,
b Ј
где М - масштаб воспроизводимой траектории, а и б - длины плеч коромысла 2, виг - длины шатунов 7 и 6 соответственно.
В механизме для воспроизведения прямолинейной траектории (фиг. 1) кинематическая связь ведущего камня 4 с основанием 1 выполнена в виде прямолинейной направляющей 8, а камень 4 имеет возможность одновременного возвратно-поступательного перемещения как по кулисе 3, так и по направляющей 8.
В механизме для воспроизведения круговой траектории (фиг. 2) кинематическая связь ведущего камня 4 с основанием 1 выполнена в виде кривошипа 9, шар- 45 нирно связанного с камнем 4. Возможны и другие варианты кинематических связей, задающие другие формы траекторий перемещения ведущего камня 4. При применя 4, но в масштабе, определяемом указанным соотношением длин плеч а и б коромысла 2 и шатунов 6 и 7.
Формула изобретения
1., Шарнирно-рычажный направляющий механизм, содержащий основание и установленные на нем двуплечие -коромысло и кулису с установленными на плечах
30 последней камнями, один из которых является ведущим, а другой - ведомым, отличающийся тем, что, с целью расширения кинематических возможностей, коромысло и кулиса установлены с возможностью вращения вокруг общей оси, меха35 низм снабжен двумя шатунами, шарнирно связывающими плечи коромысла с соответствующими камнями кулисы, а ее ведущий камень кинематически связан с основанием.
2.Механизм по п. 1, отличающийся тем, что кинематическая связь ведущего камня с основанием выпонена в виде прямолинейной направляющей, в которой с возможностью возвратно-поступательного перемещения установлен ведущий камень.
3.Механизм по п. 1, отличающийся тем, что кинематическая связь ведущего камня с основанием выполнена в виде установленного на последнем кривошипа, шарнирно связанного с ведущим камнем.
40
нении для связи звеньев механизма цилиндрических шарниров механизм плоский, а при применении сферических шарниров - пространственный.
Механизм работает следующим образом.
При сообщении от привода (не показан) ведущему камню 4 возвратно-поступательного перемещения по направляющей 8 (фиг. 1) или кругового перемещения от кривошипа 9 (фиг. 2) камень 4 перемещается по соответствующему плечу кулисы 3 и сообщает ей колебательное движение вокруг шарнира, связывающего кулису 3 с основанием 1. Одновременно через шатун 7 камень 4 приводит в коле- бательное движение вокруг того же шарнира и коромысло 2, которое через шатун 6 перемещает вдоль соответствующего плеча кулисы 3 ведомый камень 5. Совокупное движение камня 5 вдоль кулисы 3 и вместе с нею происходит по траектории, подобHog траектории перемещения ведущего камHog траектории перемещения ведущего кам
ня 4, но в масштабе, определяемом указанным соотношением длин плеч а и б коромысла 2 и шатунов 6 и 7.
Формула изобретения
5
1., Шарнирно-рычажный направляющий механизм, содержащий основание и установленные на нем двуплечие -коромысло и кулису с установленными на плечах
0 последней камнями, один из которых является ведущим, а другой - ведомым, отличающийся тем, что, с целью расширения кинематических возможностей, коромысло и кулиса установлены с возможностью вращения вокруг общей оси, меха5 низм снабжен двумя шатунами, шарнирно связывающими плечи коромысла с соответствующими камнями кулисы, а ее ведущий камень кинематически связан с основанием.
2.Механизм по п. 1, отличающийся тем, что кинематическая связь ведущего камня с основанием выпонена в виде прямолинейной направляющей, в которой с возможностью возвратно-поступательного перемещения установлен ведущий камень.
3.Механизм по п. 1, отличающийся тем, что кинематическая связь ведущего камня с основанием выполнена в виде установленного на последнем кривошипа, шарнирно связанного с ведущим камнем.
0
в
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм прерывистой подачи | 1986 |
|
SU1364797A1 |
| Пространственный шарнирно-рычажный механизм | 1985 |
|
SU1421921A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| Кулисно-рычажный механизм с остановками | 1987 |
|
SU1435867A1 |
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655568C1 |
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
| Коромыслово-ползунный механизм Тадевосяна Д.О. | 1990 |
|
SU1820098A1 |
Изобретение относится к шарнирно-рычажным направляющим механизмам и найдет применение в различных устройствах, где требуется циклическое перемещение ведомого звена по прямолинейной или различным криволинейным траекториям. Цель изобретения - расширение кинематических возможностей механизма за счет создания возможности перемещения ведомого звена по различным видам траекторий с различными соотношениями длин траекторий ведущего и ведомого звеньев. Перемещение ведущего камня 4 по какой-либо требуемой траектории вызывает колебательное движение кулисы 3, а через шатун 7, коромысло 2 и шатун 6 - перемещение ведомого камня 5 вдоль соответствующего плеча кулисы 3. Совокупное движение камня 5 вдоль кулисы 3 и вместе с нею происходит по траектории, подобной траектории перемещения камня 4, но в масштабе, определяемом соотношением длин плеч а и б коромысла 2 и шатунов 6, 7. 2 з.п. ф-лы, 2 ил.
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Наборный фрезер для дерева | 1922 |
|
SU892A1 |
