сд
о сд
со
Изобретение относится к области машиностроения и может быть использовано при обработке крупногабаритных деталей.
Целью изобретения является повышение точности перемещения рабочего органа и улучшение динамических характеристик за счет уменьшения массы устройства.
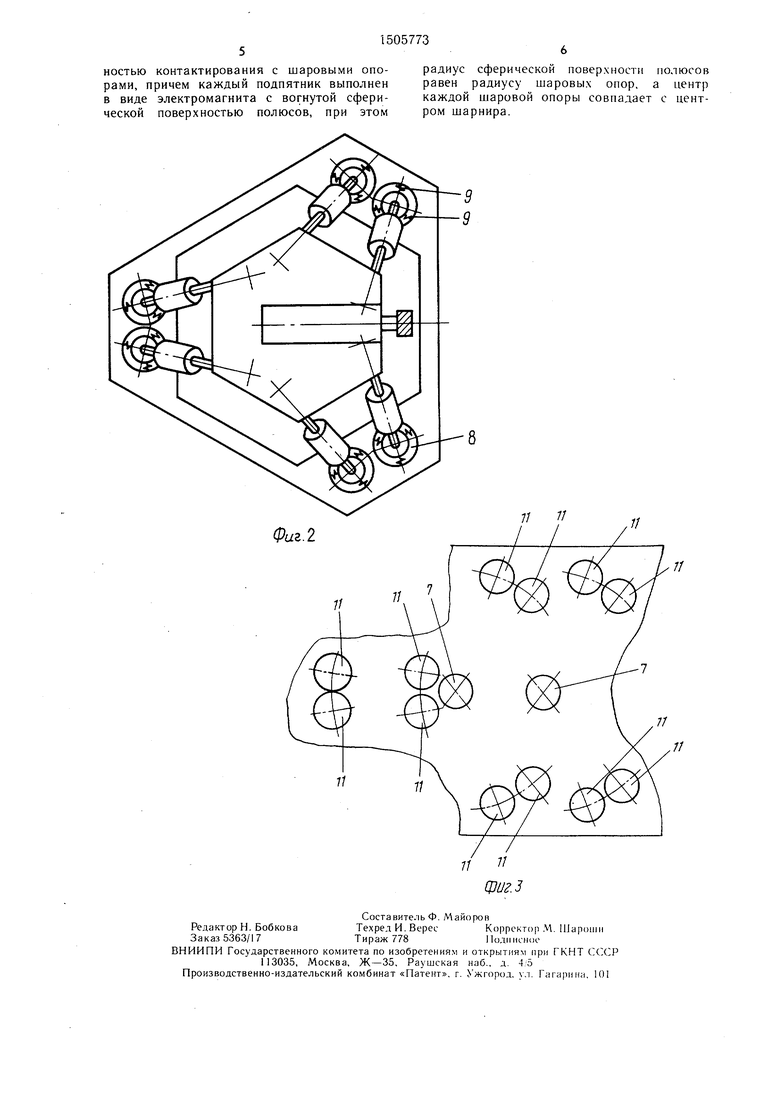
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема расположения подпятников и дисков на основании.
Устройство содержит две платформы, пер вая (платформа 1) из которых пред- назначена для размещения рабочего органа 2 а вторая (платворма 3) расположена на
10
щает платформу 3 в пределах, допускаемых цeнтpaлы ым отверстием 5, до следующего положения, определяемого положением следующих шести подпятников 11, и опускает платформу 3 на поверхность основания 1 так, что щаровые опоры 10 опираются каждая на свой новый подпятник 11, затем включают электромагниты новых задействованных подпятников 11 и выключают электромагнит фиксатора 6.
В новом положении устройства можно производить рабочие перемещения рабочего органа 2 в пределах новой рабочей зоны.
Аналогичным образом устройство перемеосновании 4 и в ней выполнено отверс- |5 щается в другие положения относительтие 5, через которое взаимодействует фик-но основания 4.
Наличие упругих связей между щаровыми опорами 10 и платформой 3 позволяет осуществить раздельное бязирова,ние шаровых опор 10 на подпятниках 11, что посатор 6, содержащий электромагнит с дисками 7, закрепленными на основании 4. В платформе 3 выполнены отверстия 8,
в которых через упругие элементы, напри-.- ,- . . ,, .., .. ..
мер, пружины 9 установлены шаровые опо- вышает точность базирования. При базиро- ры 10, а в основании 4 закреплены под- вании шаровых опор по сферическим по- пятники 11, выполненные в виде электромагнитов с вогнутой сферической поверхностью полюсов, радиус которой равен радиусу шаровых опор.
Между платформами ны линейные приводы 12, каждый из которых шарнирно связан с платформой i шарниром 13 и соответствующей опорой 10 и1арниром 14, при этом центр каждой шаверхностям положение центров шарниров 14, которое определяет точность рабочих перемещений рабочего органа 2, не зависит 25 от точности установки шаровых опор 10 и 3 установле- на соответствующие подпятники 11, так как центр шара каждой шаровой опоры 10 совпадает с центром соответствующего шарнира 14. Кроме того, платформа 3 не несет силовых функций ни при рабочих
РОБОЙ опоры 10 совпадает с центром шар- 30 перемещениях рабочего органа г, ни при
нира 14. Количество дисков 7 в устройстве равно п штук, где п - число возможных фиксированных положений устройства, а количество подпятников 11 и равно 6п.
Устройство работает следуюшим образом. 35
В исходном положении устройства (фиг. 1 и 2) шаровые опоры 10 опираются на соответствующие подпятники 11, а электромагнит фиксатора 6 поднят над основанием 4,
электромагниты задействованных подпятни- -Q вая из которых связана с рабочим ор- ков 11 включены. В этом положении мо- ганом, а вторая расположена на основа- гут производиться рабочие перемещения рабочего органа 2 в пределах рабочей зоны посредством линейных приводов 12.
Для перестановки устройства в новое
положение необходимо, юдавая управ ляю- 45 с основанием, и шесть линейных приводов, щие сигналы от системы числового прог- расположенных между платформами и шар- раммного управления (ЧПУ) на линейные приводы 12, изменять вылеты их выходных элементов таким образом, чтобы устройство опустило электромагнит фиксатора 6 на соответствующий диск 7, затем включить 50 уменынения массы устрсйства, оно снаб- электромагнит фиксатора 6 и отключитьжено щестью шаровыми опора.ми, установэлектромагниты задействованных подпятников II. После этого необходимо линейными приводами 12 управлять так, что устройство, опираясь электромагнитом фиксаперемещении устройства в новое положение, поэтому основание может быть выполнено с меньшим сечением, а следовательно, и меньшей массой, чем в известно.м устройстве.
Формула изобретения
Устройство для перемещения рабочего органа, содержащее две платформы, пернии с возможностью продольного перемещения и в ней выполнено отверстие, а также фиксатор, установленный на первой платформе с возможностью взаимодействия
нирно связанных с ними, отличающееся тем, что, с целью повышения точности перемещения рабочего органа и улучшения динамических характеристик за счет
ленными посредством упругих элементов на второй платформе и щарнирно связанными с линейными приводами, п дисками, установленными на основании с возможностью
тора 6 на диск 7, приподнимает плат- взаимодействия с фиксатором, где п - число
форму 3 над основанием 4 на высоту,возможных фиксированных положений устпревышающую глубину сферической выемкиройства на основании, и 6п подпятниками электромагнитов юдпятников 11, перемеустановленными на основании с возмож
щает платформу 3 в пределах, допускаемых цeнтpaлы ым отверстием 5, до следующего положения, определяемого положением следующих шести подпятников 11, и опускает платформу 3 на поверхность основания 1 так, что щаровые опоры 10 опираются каждая на свой новый подпятник 11, затем включают электромагниты новых задействованных подпятников 11 и выключают электромагнит фиксатора 6.
В новом положении устройства можно производить рабочие перемещения рабочего органа 2 в пределах новой рабочей зоны.
Аналогичным образом устройство перемеНаличие упругих связей между щаровыми опорами 10 и платформой 3 позволяет осуществить раздельное бязирова,ние шаровых опор 10 на подпятниках 11, что по.- ,- . . ,, .., .. ..
вышает точность базирования. При базиро- вании шаровых опор по сферическим по-
вая из которых связана с рабочим ор- ганом, а вторая расположена на основа-
перемещении устройства в новое положение, поэтому основание может быть выполнено с меньшим сечением, а следовательно, и меньшей массой, чем в известно.м устройстве.
Формула изобретения
Устройство для перемещения рабочего органа, содержащее две платформы, пер вая из которых связана с рабочим ор- ганом, а вторая расположена на основа-
нии с возможностью продольного перемещения и в ней выполнено отверстие, а также фиксатор, установленный на первой платформе с возможностью взаимодействия
с основанием, и шесть линейных приводов, расположенных между платформами и шар- уменынения массы устрсйства, оно снаб- жено щестью шаровыми опора.ми, установнирно связанных с ними, отличающееся тем, что, с целью повышения точности перемещения рабочего органа и улучшения динамических характеристик за счет
ленными посредством упругих элементов на второй платформе и щарнирно связанными с линейными приводами, п дисками, установленными на основании с возможностью
взаимодействия с фиксатором, где п - число
ройства на основании, и 6п подпятниками
установленными на основании с возможностью контактирования с шаровыми опорами, причем каждый подпятник выполнен в виде электромагнита с вогнутой сферической поверхностью полюсов, при этом
радиус сферической поверхности полюсов равен радиусу шаровых опор, а центр каждой шаровой опоры совпадает с центром шарнира.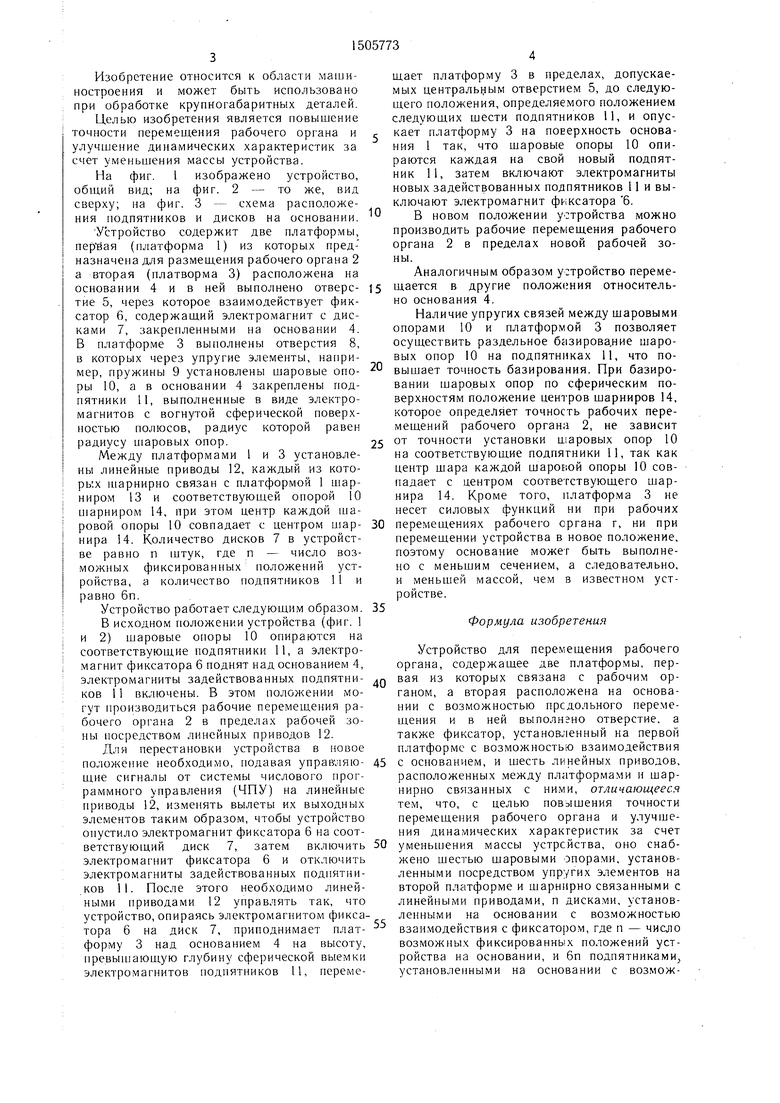
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| Станок для контурного кругового строгания зубчатых деталей | 1981 |
|
SU1024188A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ НИВЕЛИРНОЙ | 1973 |
|
SU395711A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
| Грузоподъемное устройство | 1985 |
|
SU1691287A1 |
| Устройство для определения положения центра масс объекта | 1990 |
|
SU1820255A1 |
| СТАНОК ДЛЯ РУЧНОЙ ОГРАНКИ ДРАГОЦЕННЫХ КАМНЕЙ | 2000 |
|
RU2187420C1 |
| Подвеска рабочего органа одноковшового экскаватора | 1985 |
|
SU1377337A1 |
| Фрезерный станок | 1976 |
|
SU560706A1 |
Изобретение относится к машиностроению и может быть использовано при обработке крупногабаритных деталей. Целью изобретения является повышение точности перемещения рабочего органа и улучшение динамических характеристик за счет уменьшения массы устройства. Движение устройства по основанию 4 осуществляется поочередной установкой фиксатора 6 с электромагнитом, закрепленным на платформе 1, несущей рабочий орган 2, на диски 7, закрепленные в основании 4, и шаровых опор 10 на подпятники 11 с помощью линейных приводов 12. 3 ил.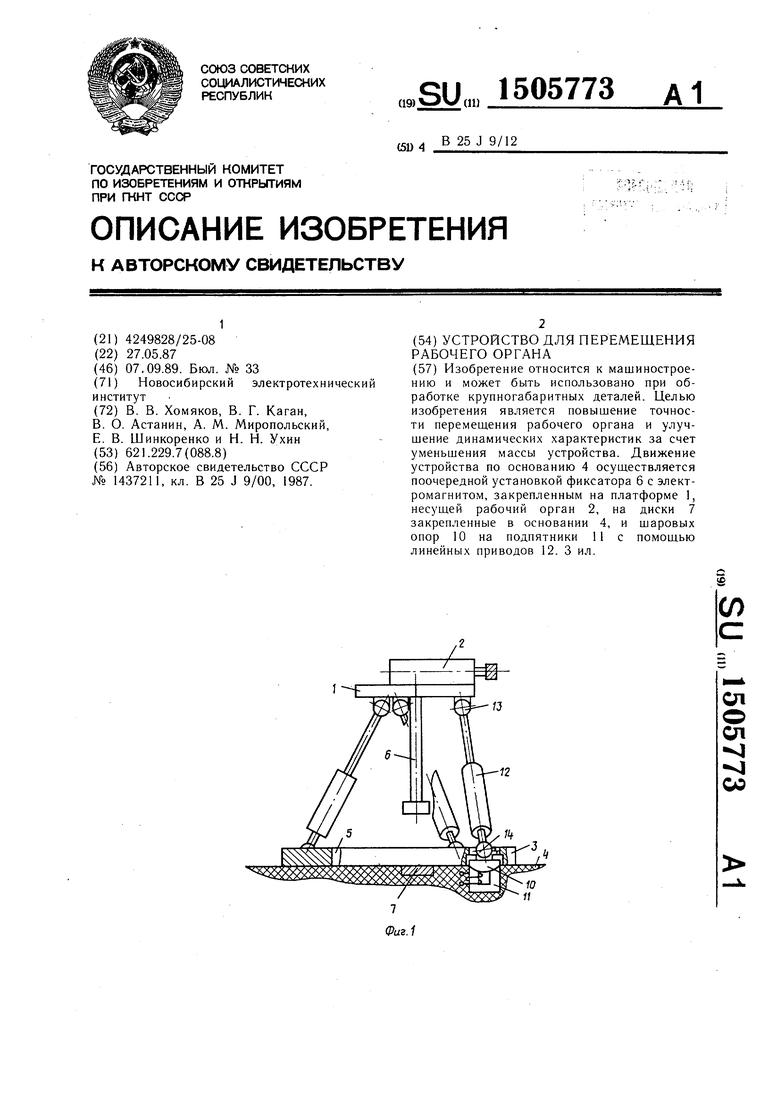
| Устройство для перемещения исполнительного органа | 1987 |
|
SU1437211A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
