28
СП
о
СП
;о
00
to
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНИЧЕСКАЯ ^'••Иностранцы Херберт Бель и Курт Диттмар(Германская Демократическая Республ 1ка) | 1970 |
|
SU263520A1 |
| Устройство для разгрузки штучных грузов | 1989 |
|
SU1640079A1 |
| Устройство для очистки корпусов судов | 1972 |
|
SU516574A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЛИННОМЕРНОЙ ТРУБЫ | 1969 |
|
SU234179A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1971 |
|
SU317588A1 |
| Устройство для перемещения запечатываемого материала | 1975 |
|
SU654456A1 |
| Устройство для контроля печатных плат | 1976 |
|
SU736389A1 |
| Полуавтоматический станок для продороживания коллекторов якорей электрических машин | 1961 |
|
SU140873A1 |
| УСТРОЙСТВО для РАЗРЕЗАНИЯ ПОЛОТНА С БАХРОЛЮЙ | 1966 |
|
SU183177A1 |

Изобретение относится к оборудованию для химической обработки изделий. Цель изобретения - уменьшение расхода обрабатывающего раствора. Устройство содержит тележку 1 с приводом ее пошагового перемещения по направляющим 2 посредством электродвигателя 3, каретку 4, установленную на направляющих 5 тележки 1 с возможностью возвратно-поступательного перемещения посредством электродвигателя 6. Обрабатываемая поверхность 7 с заклепочными соединениями 8 имеет возможность располагаться между направляющими 2, прикрепленными к станине 9. Рабочий орган, выполненный в виде валика 10, установлен с возможностью вращения вокруг своей оси в подшипниках 11 якорей 12 электромагнитов. Вращение валика 10 осуществляется электродвигателем 16. Уменьшение расхода обрабатывающего раствора достигается введением в устройство двух датчиков регистрации заклепочных соединений, установкой держателя рабочего органа в корпусе каретки с возможностью вертикального возвратно-поступательного перемещения, установкой каретки на тележке с приводом ее пошагового перемещения. 3 з.п.ф-лы, 5 ил.
/
Изобретение относится к оборудованию для химической оброработки, а именно к технологическому оборудованию для химической обработки заклепочных соединений.
Цель изобретения - уменьшение расхода обрабат1.гпа ощего раствора путем избирательного нанесения обрабатывающего раствора на заклепочные соединения о
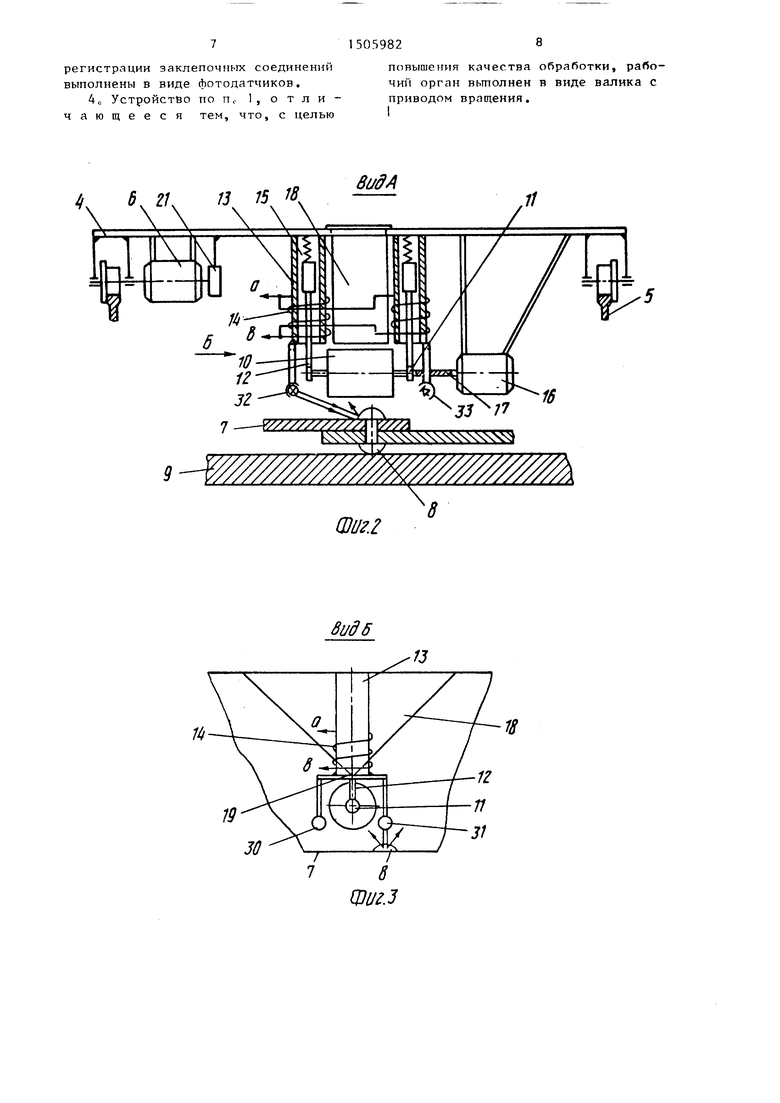
На фиг. 1 изображено устройство для химической обработки изделий, вид сверху; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2 на фиг. 4 - блок-схема блока управления; на фиг, 5 - логическая схема блока управления.
Устройство для химической обработки заклепочных соединений имеет тележку 1 с приводом ее пошагового перемещения по направляюпшм 2 посредством электродвигателя 3, каретку 4, установленную на направляющих 5 тележки 1 с возможностью возвратно- поступательного перемещения посредством электродвигателя 6. Обрабатываемая поверхность 7 с заклепочными соединениями 8 имеет возможность располагаться между направляющими 2, прикрепленными к станине 9. Рабочий орган, вьтолненньй в виде валика 10, установлен с возможностью вращения вокруг своей оси в подшипниках 11 якорей 12 электромагнитов 13, прикрепленных к корпусу каретки 4о При пропускании тока через обмотки 14 электромагнитов 13 якори 12, преодолевая противодействие пружин 15, имеют возможность перемещаться вниз, прижимая при этом валик 10 к обрабатываемой поверхности 7. Вращение валика 10 осуществляется посредством электродвигателя 16 через гибкий вал 17„ К корпусу каретки 4 над валиком 10 крепится ванна 18, которая имеет щель 19 для выхода обрабатывающего раствора на поверх- ност1-ь валика 10с Для точной остановки тележки 1 и каретки 4 электродвигатели 3 и 6 их приводов имеют электромагнитные тормоза 20 и 21 соответственно,;
Устройство имеет блок 22 управле- ния, содержащий схему 23 управления пощаговым перемещением тележки, схе- му 24 управления возвратно-поступательным перемещеьгием каретки, схему
5
5
0
е
25 управления возвратно-поступательным перемещением держателя валика. Перемещение тележки 1 вперед и назад ограничивается конечными выключателями 26 и 27 соответственно, а перемещение каретки влево и вправо ограничивается конечными выключателями 28 и 29 соответственно.Выход схемы 23 управления пощаговым перемещением тележки соединен с разрешающим движение каретки входом, а входом с выходом схемы 24 управления возвратно-поступательным перемещением каретки, этим достигается возможность перемещения тележки 1 только после окончания перемещения каретки 4 и, наоборот, возможность перемещения каретки 4 только 0 после окончания перемещения тележки 1 . По обе стороны от валика 10 в направлении его горизонтального перемещения установлены датчики регистрации заклепочных соединений, вы5
0
5
0
полненные, например, в виде фотодатчика 30, имеющего возможность регистрировать заклепочное соединение при движении каретки 4 влево, и фотодатчика 31, имеющего возможность регистрировать заклепочное соединение при движении каретки 4 вправо.
Каждый фотодатчик состоит из источника 32 света и фотодиода 33„При отсутствии заклепочного соединения 8 между источником 32 света и фотодиодом 33 каждый фотодатчик обеспечивает возможность появления на своем выходе сигнала Выходы датчиков регистрации заклепочный соединений, выполненных в виде фотодатчиков 30 и 31, подключены к входам блока 22 управления о Интервал времени пошагового перемещения тележки 1 можно установить потенциометром 34 одно- вибратора 35 схемы 23 управления пошаговым перемещением тележки. Интервал времени, во время которого валик IО находится в нижнем положении, можно задать аналогично потенциометром 36 одиовибратора 37.
Устройство работает следующим образом,,
В исходном положении тележка 1 находится в крайнем заднем положении, при этом нажат конечный выключатель 27, и каретка 4 находится в крайнем левом положении, при этом нажат конечный выключатель 28. В ванну 18 заливается обрабатывающий расвор. При нажатии ла кнопку каретка 4 начинает перемещаться вправо. Начинает вращаться валик 10 с попадающим на него обрабатывающим раствором из ванны 1Я„ При отсутствии заклепочного соединения 8 на выходе фотодатчика 31 существует сигнал и валик 10 находится в верхнам положении, не взаимодействия с обрабатываемой поверхностью 7. При регистрации заклепочного соединения фотодат чиком 31 сигнал на его выходе становится равным нупю, электромагниты 13 получают питание и вращающийся валик 10 прижимается к заклепочному соединению, нанося на него раствор Через промежуток времени, устанавливаемый потенциометром 36 одно- вибратора 37, электромагниты 13 отключаются и валик 10 поднимается под действием пружин 15о Так происходит каждый раз при регистрации очередного заклепочного соединения 8 фотодатчиком 31. Каретка 4 перемещается вправо до тех пор, пока не нажат конечный выключатель 29, при этом электродвигатель 6 каретки отключается Включается электродвигатель 3 перемещения тележки 1 на время, которое .устанавливается по т енциометром 34 одновибратора 35 схемы 23 управления пошаговым перемещением тележки. После шагового перемещения тележки 1 вновь включается электродвигатель 6 перемещения каретки 4 и она начинает перемещаться влево, при этом валик 10 меняет направление вращения так, что нижние его точки .движутся в сторону перемещения каретки 4, а в работе принимает участие фотодатчик 30 о
При нажатии на конечный выключатель 28 каретка 4 останавливается и происходит шаговое перемещение тележки 1 и ТоДо Таким образом, обрабатываются раствором все заклепочные соединения 8 обрабатываемой поверхности 7оПри достижении тележкой 1 переднего крайнего положения срабатывает конечный выключатель 26 и тележка возвращается в исходное заднее крайнее положение, Устройство вновь готово к работе для обработки следующей обрабатываемой поверхности
Таким образом, уменьшение расхода Обрабатывающего раствора, достиР82
гается путем избирательного его нанесения на заклепочные соединения. С уменьшением количества заклепочных соединений на обрабатываемой поверхности экономия обрабатывающего раствора возрастает и может из--, меняться многократно, в десятки раз по сравненр{ю с нанесением покрытия в виде непрерывной полосы изввест- ным устройством.
Формула изобретения
I. Устройство для химической обработки заклепочных соединений, содержащее каретку, установленную на направляющих с возможностью горизонтального возвратно-поступательного
перемещения, рабочий орган, привод, держатель рабочего Органа, ванну и блок управления, отличающееся тем, что, с целью уменьшения расхода обрабатьшаемого раствора
путем избирательного нанесения, оно снабжено тележкой с приводом ее пошагового перемещения, двумя датчиками регистрации.заклепочного соединения, установленными по обе стороны от рабочего органа, выходы которых подключены к входам блока управления, причем держатель рабочего органа установлен в корпусе каретки с возможностью вертикального возвратно-поступательного перемещения, а каретка установлена на тележке с приводом ее пошагового перемещения.
2 о Устройство по п. 1, о т л и чающееся тем, что блок управления выполнен в виде соединенных схем управления пошаговым перемещением тележки, схемы управления возвратно-поступательным перемещением
каретки и схемы управления возвратно -по с туп а тел ьнь(М перемещением держателя рабочего органа, причем выход схемы управления пошаговым перемещением тележки соединен с разрешаюЩим движение каретки входом привода, а вход - с выходом схемы управления перемещением каретки, а входы схемы управления перемещением держателя рабочего органа соединены с двумя
датчиками регистрации заклепочного оединения.
регистрации заклепочных соединений выполнены в виде фотодатчиков.
4о Устройство но Пс 1, о т л и - чающееся тем, что, с целью
Шиг.г
Видб
повышения качества обработки, рабочий орган вьтолнен в виде валика с приводом вращения.
видА
31
23
Lk
2li
iw
ff
30 31
Фиг.
/if
CPU г. 5
