1
Изобретение относится к судоремонту, в частности к устройствам для очистки корпусов судов.
Известны устройства для очистки корпусов судов, включающие самоходную тележку, очистную рабочую головку, механизм подъема и опускания рабочей головки и следящую систему.
Однако при очистке днищ судов такими устройствами телескопическая штанга заваливается до-горизонтального положения, а отсутствие устройства для синхронного поворота колес у самоходной тележки создает малую маневренность последней, что влияет ка производительность устройства по очистке поверхности судна.
Цель изобретения - уменьшение габаритов устройства по высоте и улучшение копирования обводов корпуса судна.
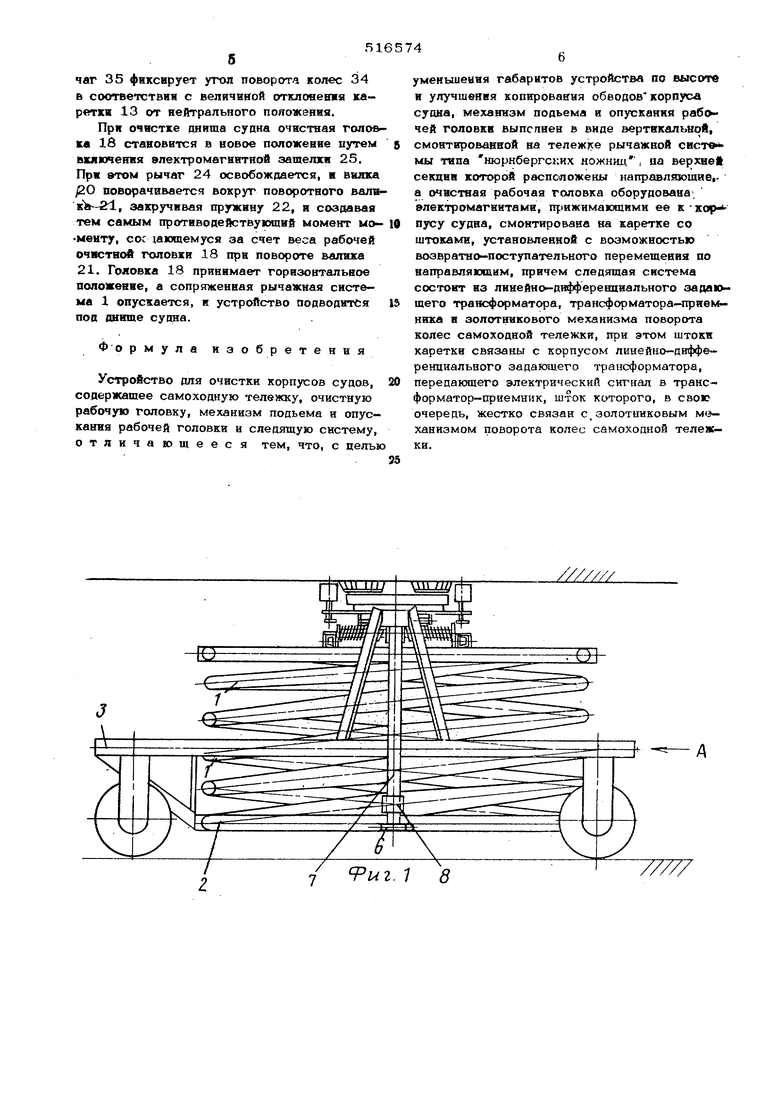
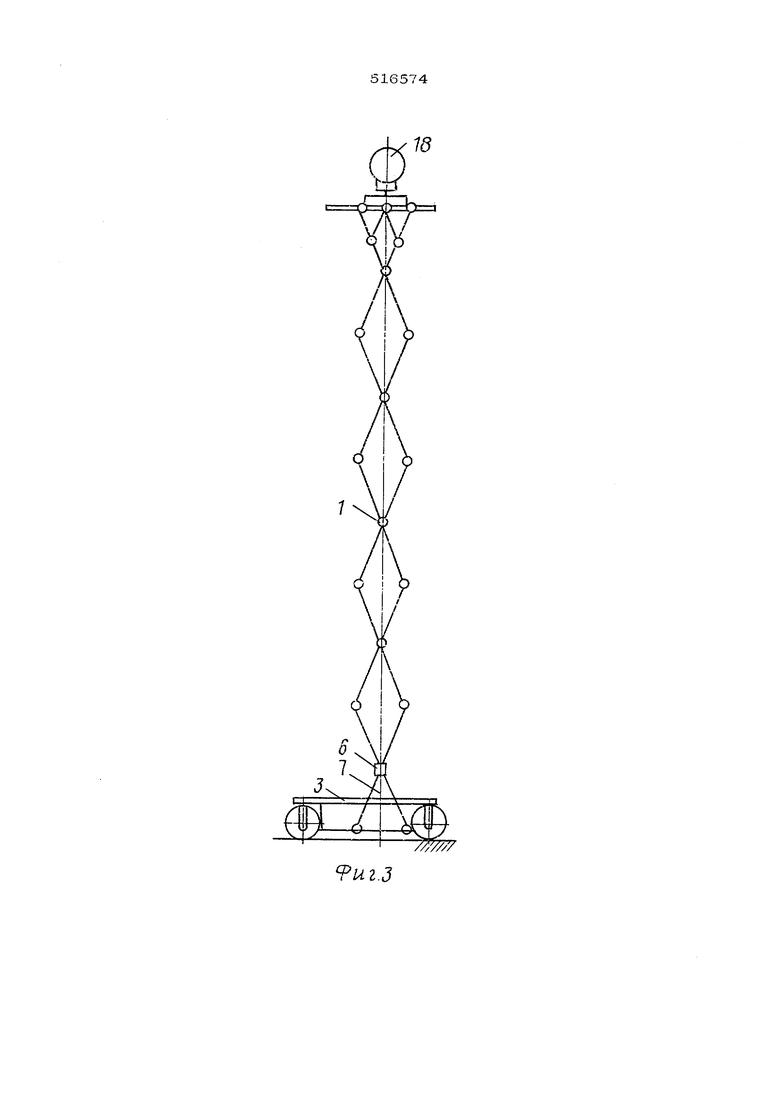
Это достигается за счет того, что ме- ханизм подъема и опускания рабочей головки выполнен в виде вертикальной, смонтированной на тележке рычажной раздвижной системы типа нюрнбергских ножниц, на верхне секции которой расположены направляющие,
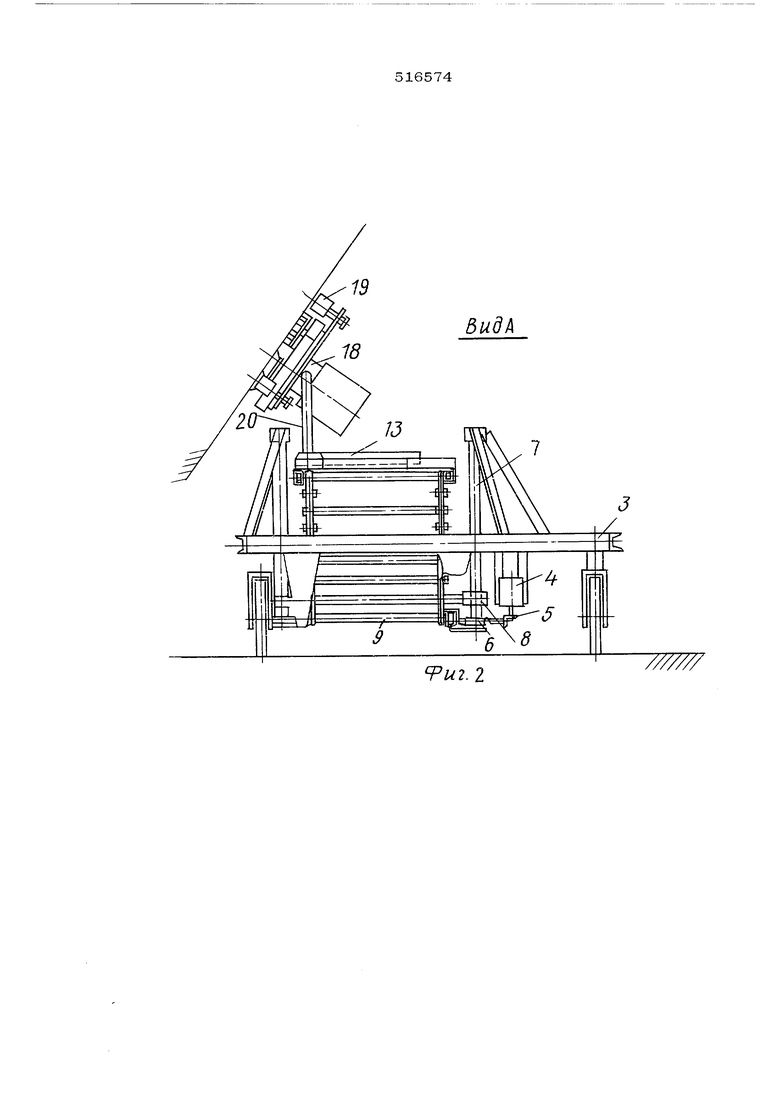
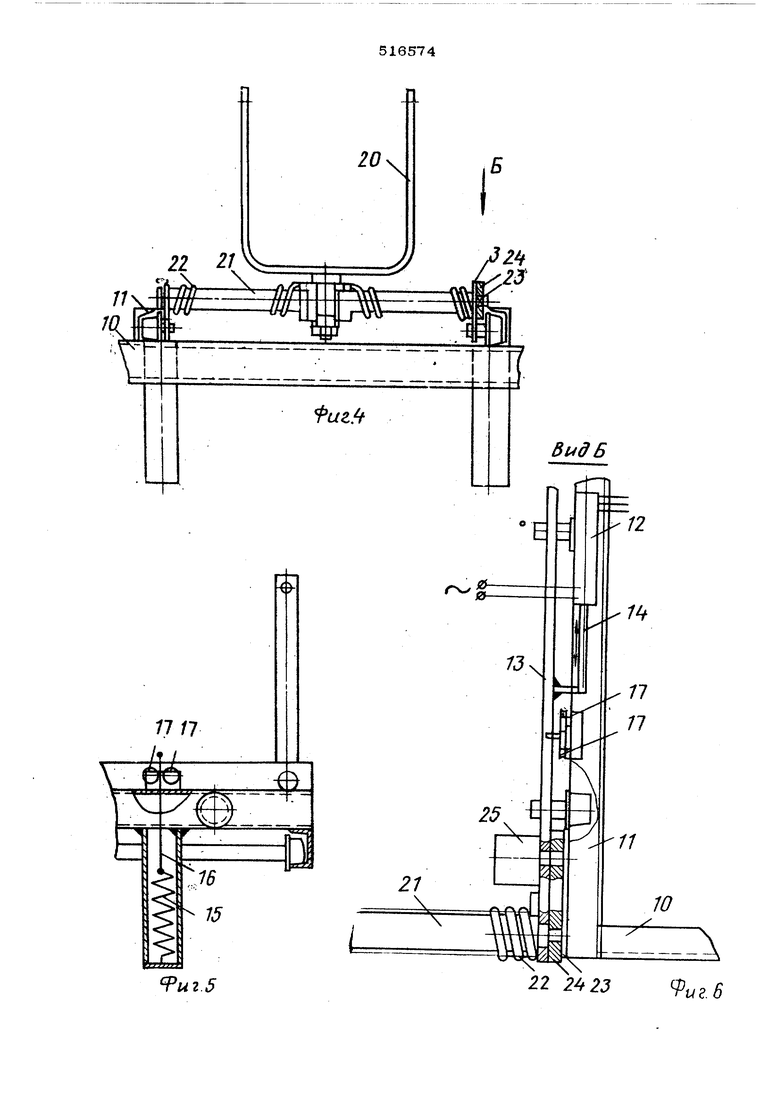
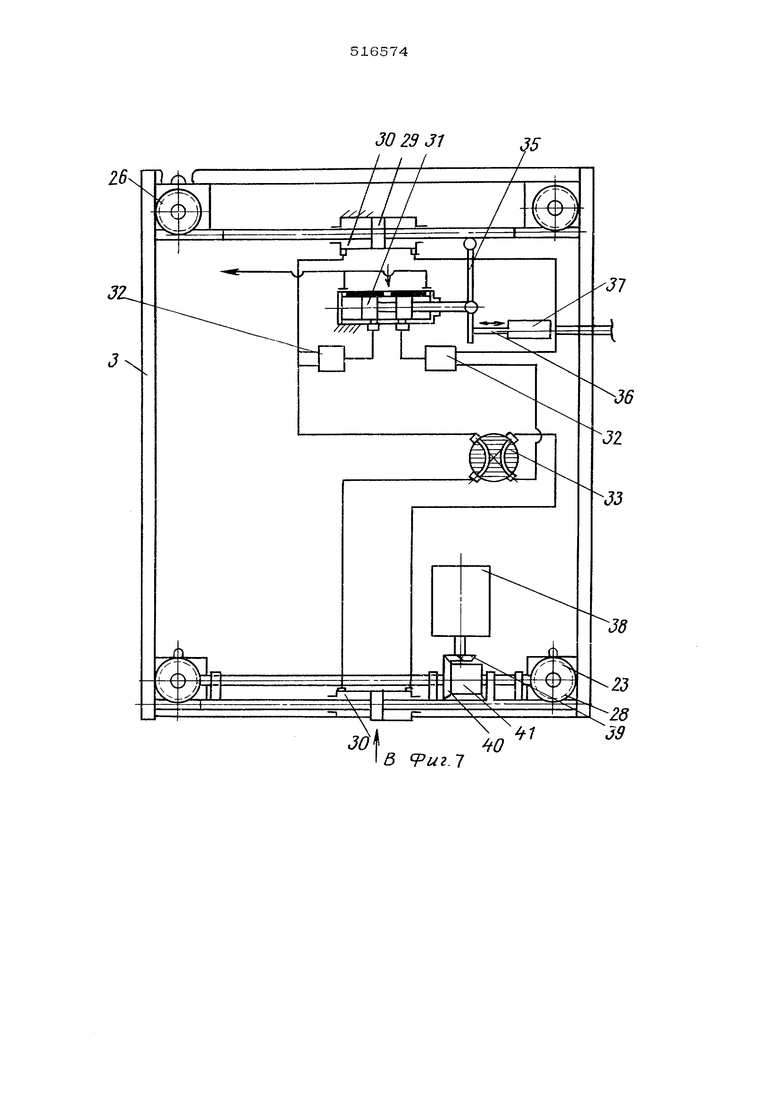
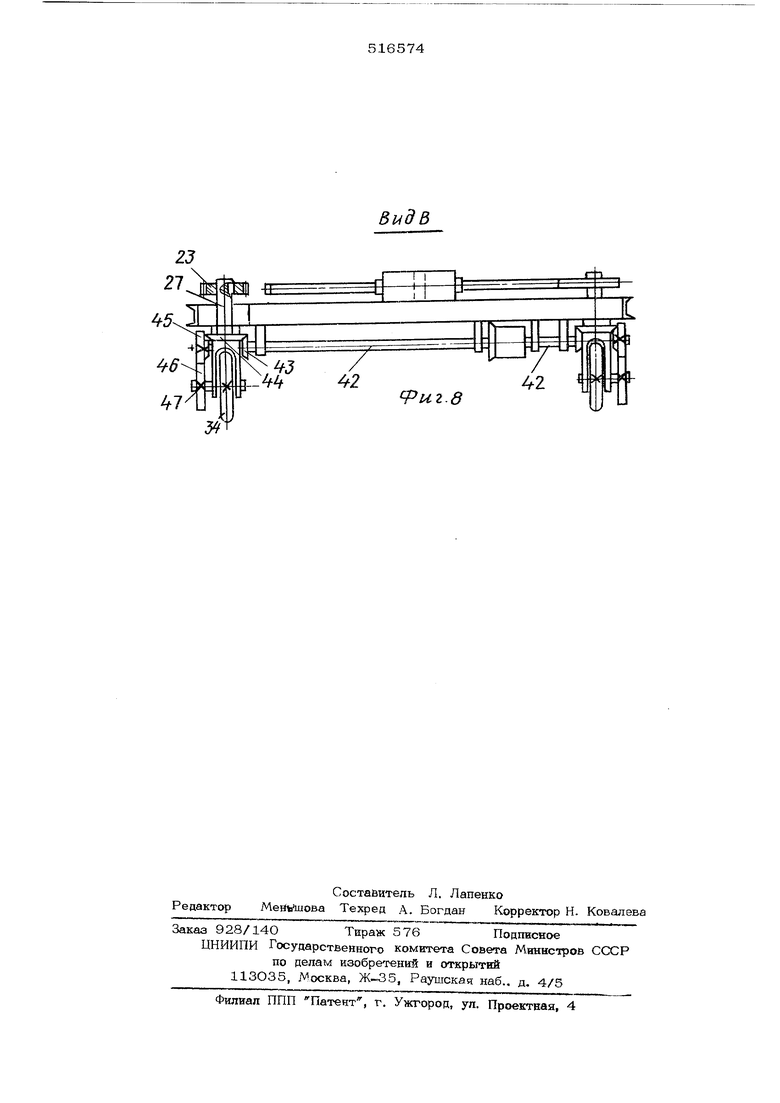
а очистная рабочая головка оборудована электромагнитами, прижимающими ее к корпусу судна, и смонтирована на каретке со штоками, установленной с возможностью возвратно-поступательного перемещения по направляющим, причем следящая система состоит из линейно-дифференциального задающего трансформатора, трансформатора- триемника и золотникового механизма поворота колес самоходной тележки, при этом щтоки каретки связаны с корпусом линейно-дифференциального задающего трансформатора, передающего электрический сигнал в трансформатор-приемник, шток которого, в свою очередь, жестко связан с залотЕшковым механизмом поворота колес самоходной лележки, На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - кинематиеская схема устройства на фиг. 4 - вилка, вид спереди; на фиг. 5 то же, вид сбоку; на фиг. 6 - вид по стрелке Б на фиг. 4; на фиг. 7 - самоходная тележка с гидравлической следящей системой Т1равления; на фиг. 8 - вид по стрелке В на фиг. 7. Устройство содержит сопряженную рычаж ную систему 1 типа нюрнбергских ножниц, вертикально установленную на нижней площадке 2 самоходной тележки 3. На последней смонтирован механизм раз движения системы 1, состоящий из электродвигателя 4, передакяцего вращение через пары конических 5 и червячных 6 шестерен винту вращения 7, который входит в зацепление с рабочей гайкой 8, жестко связанной с нижним звеном 9 системы 1. В верхней секции системы 1 к крайнему звену 10 жестко прикреплены направляющие 11 с корпусом линейно-дифференциального трансформатора 12. В направляющие 11 вмонтирована с возможностью возвратно-поступательного движения каретка 13 со штоком 14. Штоки взаимодействуют с корпусом трансформатора 12 при смещении каретки 13 от нейтрального положения, обеспечивае мого пружинами растяжения 15, соединенны ми тросиками 16, запасованными в ролики 17. Тросики 16 закреплены в каретке 13. Рабочая очистная головка 18 с установленными по окружности электромагнитами 1 щарнирно установлена в вилке 20, которая соединена с поворотным валиком 21, имеющим компенсирующие пружины скручивания 22. Валик 21 шарнирно закреплен в каретке 13. На одном конце валика 21 имеется квадрат 23, на который насажен рычаг 24 с возможностью фиксирования защелкой 25. Рулевое управление тележки включает шестерни 26, жестко посаженные на свобод ные концы вилок 27 и взаимодействующие с зубчатыми рейками 28, которые связаны с поршнями 29 гидроцилиндров 30, полости которых связаны с распределительным золотником 31 через дроссельные разделители потоков 32. Четьфехходовой манипулятор 33 служит для изменения движения одного из поршней гидроцклиндров 30. Для стабилизации углов поворота колес 34 следящая электрогидравлическая система содержит рычаг обратной связи 35, сво бодный конец которого соединен со штоком 36 трансформатора-приемника 37. При переходе на ручное управление пово ротом колес 34 самоходной тележки 3 пред смотрен выключатель ( на чертеже не показан) для отключения электрической цепи следящей электрогидравлической системы. Механизм передвижения тележки содержит электродвигатель 38, на конце вала которого жестко насажена коническая шестерня 39, входящая в зацепление с коническим колесом 40 дифференциала 41. Сателлиты дифференциала жестко соединены с полуосями 42, на концах которых установены конические шестерни 43, входящие в зацепление с коническими колесами 44, вободно сидящими на вилках 27, и передающие вращение коническо-цилиндрическим коесам 45, которые входят в зацепление с цилиндрическими колесами 46, неподвижно насаженными на оси 47 ведущих колес 34. Устройство работает следующим образом. При приближении к борту судна включается электродвигатель 4, который через коническую 5 и червячную 6 пары приводит во вращение винт 7. При вращении вивта 7 происходит доступательное движение рабочей гайки 8, жестко связанной с нижним звеном 9 системы 1. При этом начинается расширевгае звеньев системы 1, а следовательно, и подъем рабочей очистной головки 18 до места начала очистки поверхности борта. Вилка 2О устанавливается в вертикальное положение пружинами 22, а рычаг 24 фиксируется электромагнитной зашелкой 25 в каретке 13. При подаче питания на электромагниты 19 они прижимают рабочую головку 18 к очищаемой поверхности судна. При движении устройства вдоль прямолинейного борта каретка 13 занимает нейтральное положение. Цепь следящей системы находится в равновесии, и поэтому никакие сигналы на управление поворотом колес 34 не поступают в трансформатор-приемник 37. При изменении обвода борта самоходная тележка 3 продолжает двигаться по прямой, а каретка 13 начинает смещаться от нейтральгного положения в сторону изменения обвода борта, вследствие постоянного прижатия очистной головки электромагнитами, При этом происходит взаимодействие штоков 14 с корпусом трансформатора 12, передающего электрический сигнал в трансформатор-приемник 37. Последним штоком 36 через рычаг 35 воздействует на золотник 31, перемещая штоки с поршнями. А те, в свою очередь, открывают соответствукицие перепускные отверстия, через которые рабочая жидкость под давлением поступает в рабочие гидроцилиндры 30, перемещая поршни 29. Рейки 28, связанные со штоками поршней 29, перемещаются и приводят во вращение шестерни 26. Вместе с шестернями 26 вилки 27 и колес 34 поворачиваются в сторону, противоположную перемещению каретки 13, до тех пор, пока существует относительное перемещение картеки 13 и самоходной тележки 3. Таким образом, каждое смещение каретки 13 от нейтрального положения сопровождает ся автоматическим поворсугом колес тележки 3 в сторону отклонения каретки 13, а рычаг 35 фиксирует утч5Л поворота колес 34 в соответствии с велячниой отклоневвя кар€ ткв 13 от нейтрального положения. При очистке дниша судна очистная голов ка 16 становится в новое положение путем включения электромагнитной эашелш 25. При 8ТОМ рычаг 24 освобождается, в вилка 0 поворачивается вокруг поворотного вали KV-21, закручивая пружину 22, и создавая тем самым противодействующий момент моменту, сое 1аю1цемуся за счет веса рабочей очистной головки 18 при повороте валика 21. Гояовка 18 принимает горизонтальное положение, а сопр пкенная рычажная система 1 опускается, и устройство подводится под днише судна. Ф о рмула изобретения Устройство для очистки корпусов судов, содержащее самоходную тележку, очистную рабочую головку, механизм подъема и опускания рабочей головки и следящую систему, отличающееся тем, что, с целью уменьшения габаритов устройства по высоте и улучшения копировакия обводов корпусл судна, механизм подъема и опускания рабо чей ГОЛОВКЕ выпспнен в виде вертикальной, смонтированной на тележ е рычажной систв мы тина нюрнбергских ножниц , иа ве{)хаей секции которой расположены направлязощие,а очистная рабочая головка оборудована, электромагнитами, прижимающими ее к-ка| пусу судна, смонтирована на каретке со штоками, установленной с возможностью возвратно-поступательного перемещения по направляющим, причем следятоая система состоит из линейно-дифференциального задакущего трансформатора, трансформатора-приемника и золотникового механизма поворота колес самоходной тележки, при этом штоки каретки связаны с корпусом линейно-днфференииального задающего трансформатора, передающего электрический сигнал в трансформатор-приемник, шток которого, в свои: очередь, жестко связан с, золотииковым MIJ- ханизмом поворота колес самоходной тележки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки корпуса судна | 1985 |
|
SU1274956A1 |
| Устройство для очистки и окраски корпуса судна | 1977 |
|
SU735479A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1981 |
|
SU1002180A2 |
| Устройство для очистки корпуса судна | 1988 |
|
SU1565748A1 |
| Устройство для очистки корпуса судна | 1983 |
|
SU1134473A1 |
| Устройство для очистки корпуса судна | 1983 |
|
SU1152879A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КОРПУСОВ СУДОВ | 1969 |
|
SU243424A1 |
| ВПТ Б | 1973 |
|
SU398447A1 |
| СТАНЦИЯ ОЧИСТКИ КОРПУСА СУДНА НА ПЛАВУ | 1971 |
|
SU293722A1 |
| Днищевая очистная машина | 1987 |
|
SU1558767A1 |
/////// ///// U2.2 ///////
9иг.З 22 21 .5 %г.5
30 29 Л
I I I
23
28 39
f«
1/3 .1
