/// /// //
сд
о
со
В
,5 13, П 3 2 J5 J Фиг.1
////////////
Изобретение относится к землеройным машинам, в частности к гидравлическим одноковшовым экскаваторам, применяемым в строительстве на дорожных и погрузочных работах.
Цель изобретения - повышение устойчивости, надежнос-ги и производительности.
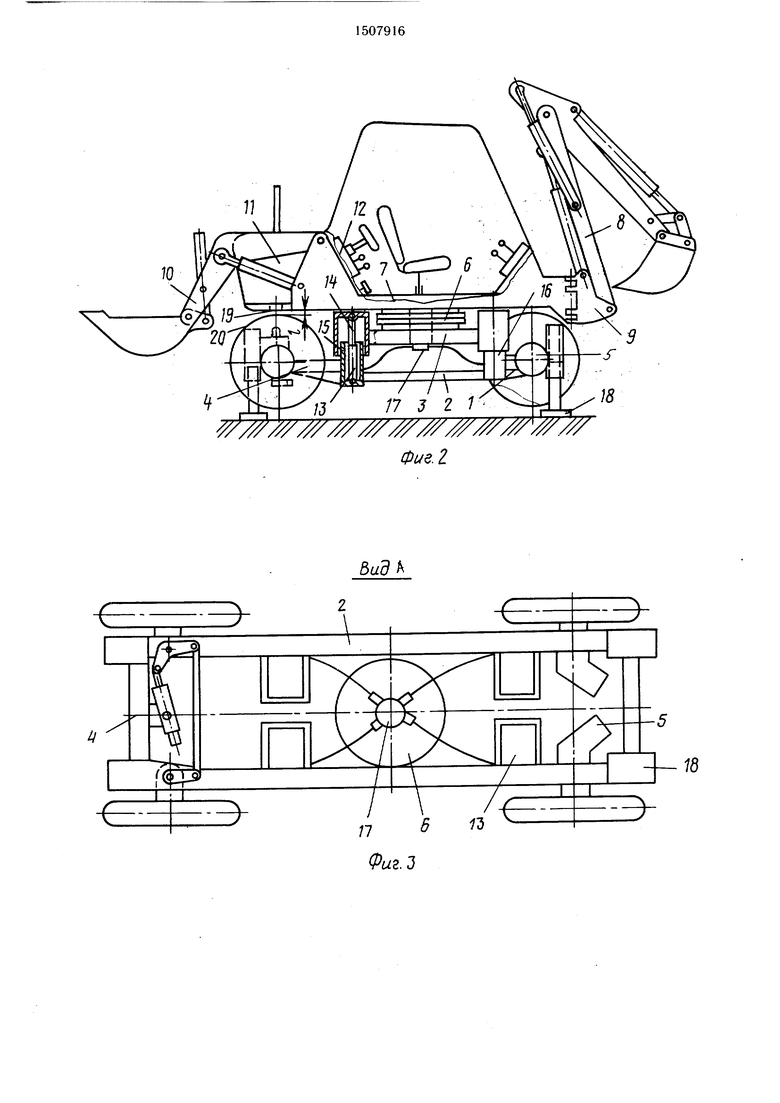
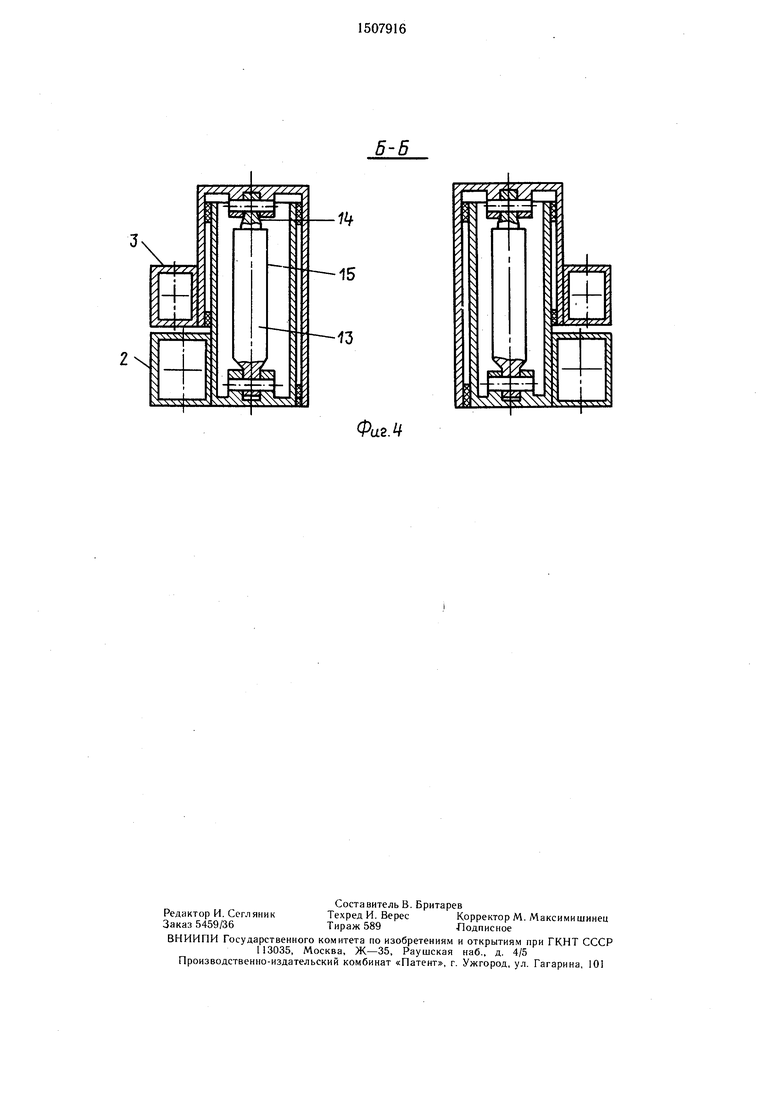
На фиг. 1 показан гидравлический экскаватор при опуш,енной верхней раме, вид сбоку; на фиг. 2 - то же, при поднятой верхней раме, вид сбоку; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1.
Гидравлический одноковшовый экскаватор включает раму 1, выполненную из нижней 2 и верхней 3 частей, механизм пе- 15 редвижения в виде переднего управляемого 4 и заднего ведушего 5 мостов. На верхней раме 3 установлен опорно-поворотный механизм 6, связанный с поворотной платформой 7, на которой смонтированы основное рабочее оборудование 8 на поворотной колонке 9 и фронтальное рабочее оборудование 10, силовой гидравлический привод 11 и система управления 12. Нижняя рама 2 соединена с механизмом передвися максимальная глубина копания. При работах выше уровня стояния выдвигают штоки 14 гидроцилиндров 13. При этом происходит вертикальное перемещение рамы 3
с относительно рамы 2 и между нижней частью 19 поворотной платформы 7 и верхней частью 20 механизма передвижения образуется зазор /. Создается возможность полного поворота платформы 7 вокруг оси опорно-поворотного механизма б и достигается
максимальная высота выгрузки. В таком положении возможно угловое смещение оси копания, что достигается поворотом платформы 7 на ОПУ 6 и последующим копанием оборудованием 8 с выгрузкой при помощи поворотной колонки 9.
При работе фронтальным оборудованием 10 поднимают опоры 18 и включают привод 5 механизма передвижения. При этом штоки 14 гидроцилиндра 13 могут быть как втянуты, так и выдвинуты. В первом случае экскаватор выполняет функции непол- ноповоротного экскаватора, например экскаватора-погрузчика, а во втором случае появляется возможность разгрузки фронтального оборудования при использовании пово20
женин. Верхняя 3 и нижняя 2 рамы соеди- jr рота. Это сокращает количество установоч30
нены гидроцилиндрами 13, обеспечивающими вертикальное перемещение верхней рамы 3 относительно нижней рамы 2. Штоки 14 гидроцилиндров 13 шарнирно прикреплены к верхней раме 3, а их гильзы 15 шарнирно прикреплены к нижней раме 2.
Гидроцилиндры 13 размещены в корпусах 16. Трубопроводы 17 соединяют гидроцилиндры 13 с силовым гидравлическим приводом 11 и системой управления 12.
Нижняя рама 2 имеет выдвижные опоры 18. При втянутых штоках 14 гидроцилинд- 35 ров 13 нижняя часть 19 поворотной платформы 7 находится ниже верхней части 20 механизма передвижения. При выдвинутых щто- ках 14 гидроцилиндров 13 между нижней частью 19 поворотной платформы 7 и верхней частью 20 механизма передвижения имеется зазор /.
Гидравлический экскаватор работает следующим образом.
При втянутых штоках 14 гидроцилиндров
40
ных передвижении экскаватора перед загрузкой, что характерно для экскаватора-погрузчика, и увеличивает производительность. При транспортных переездах штоки 14 цилиндров 13 втягиваются, и нижняя часть 19 платформы 7 не превышает верхней части 20 механизма передвижения, что обеспечивает понижение центра тяжести экскаватора и повышение его устойчивости. Это приводит к уменьшению динамических нагрузок и способствует повышению надежности экскаватора.
Формула изобретения
Гидравлический экскаватор, включающий опорную раму с механизмом перевижения, опорно-поворотный механизм с поворотной платформой и установленным на ней рабочим оборудованием с дополнительным по- в оротным механизмом у пяты стрелы, гидроцилиндры управления, отличающийся тем.
13 экскаватор может работать рабочим обо- 45 что, с целью повыщения устойчивости, нарудованием 8 как неполнооборотный. При
выдвинутых штоках 14 гидроцилиндров 13
экскаватор становится полноповоротным.
Так, при работе оборудования ниже уровня
стояния с помощью силового гидроприводежности и производительности, опорная рама выполнена из нижней и верхней частей, соединенных между собой посредством гидроцилиндров, причем нижняя часть рамы соединена с механизмом передвижения, а ее
да 11 выдвигают опоры 18 и втягивают 50 верхняя часть соединена с опорно-поворот- штоки 14 гидроцилиндров 13. При этом нижняя часть 19 поворотной платформы 7 не превышает верхней части 20 механизма передвижения. С помощью рабочего оборудования 8 и поворотной колонки 9 производят копание и выгрузку грунта. Достигает- движения.
ным механизмом и поворотной платформой, при этом верхняя часть рамы установлена с возможностью перемещения ее в вертикальной плоскости и размещения в верхнем положении с зазором над механизмом пере
ся максимальная глубина копания. При работах выше уровня стояния выдвигают штоки 14 гидроцилиндров 13. При этом происходит вертикальное перемещение рамы 3
относительно рамы 2 и между нижней частью 19 поворотной платформы 7 и верхней частью 20 механизма передвижения образуется зазор /. Создается возможность полного поворота платформы 7 вокруг оси опорно-поворотного механизма б и достигается
максимальная высота выгрузки. В таком положении возможно угловое смещение оси копания, что достигается поворотом платформы 7 на ОПУ 6 и последующим копанием оборудованием 8 с выгрузкой при помощи поворотной колонки 9.
При работе фронтальным оборудованием 10 поднимают опоры 18 и включают привод 5 механизма передвижения. При этом штоки 14 гидроцилиндра 13 могут быть как втянуты, так и выдвинуты. В первом случае экскаватор выполняет функции непол- ноповоротного экскаватора, например экскаватора-погрузчика, а во втором случае появляется возможность разгрузки фронтального оборудования при использовании пово
рота. Это сокращает количество установоч
ных передвижении экскаватора перед загрузкой, что характерно для экскаватора-погрузчика, и увеличивает производительность. При транспортных переездах штоки 14 цилиндров 13 втягиваются, и нижняя часть 19 платформы 7 не превышает верхней части 20 механизма передвижения, что обеспечивает понижение центра тяжести экскаватора и повышение его устойчивости. Это приводит к уменьшению динамических нагрузок и способствует повышению надежности экскаватора.
Формула изобретения
Гидравлический экскаватор, включающий опорную раму с механизмом перевижения, опорно-поворотный механизм с поворотной платформой и установленным на ней рабочим оборудованием с дополнительным по- в оротным механизмом у пяты стрелы, гидроцилиндры управления, отличающийся тем.
что, с целью повыщения устойчивости, надежности и производительности, опорная рама выполнена из нижней и верхней частей, соединенных между собой посредством гидроцилиндров, причем нижняя часть рамы соединена с механизмом передвижения, а ее
верхняя часть соединена с опорно-поворот-
верхняя часть соединена с опорно-поворот-
движения.
ным механизмом и поворотной платформой, при этом верхняя часть рамы установлена с возможностью перемещения ее в вертикальной плоскости и размещения в верхнем положении с зазором над механизмом пере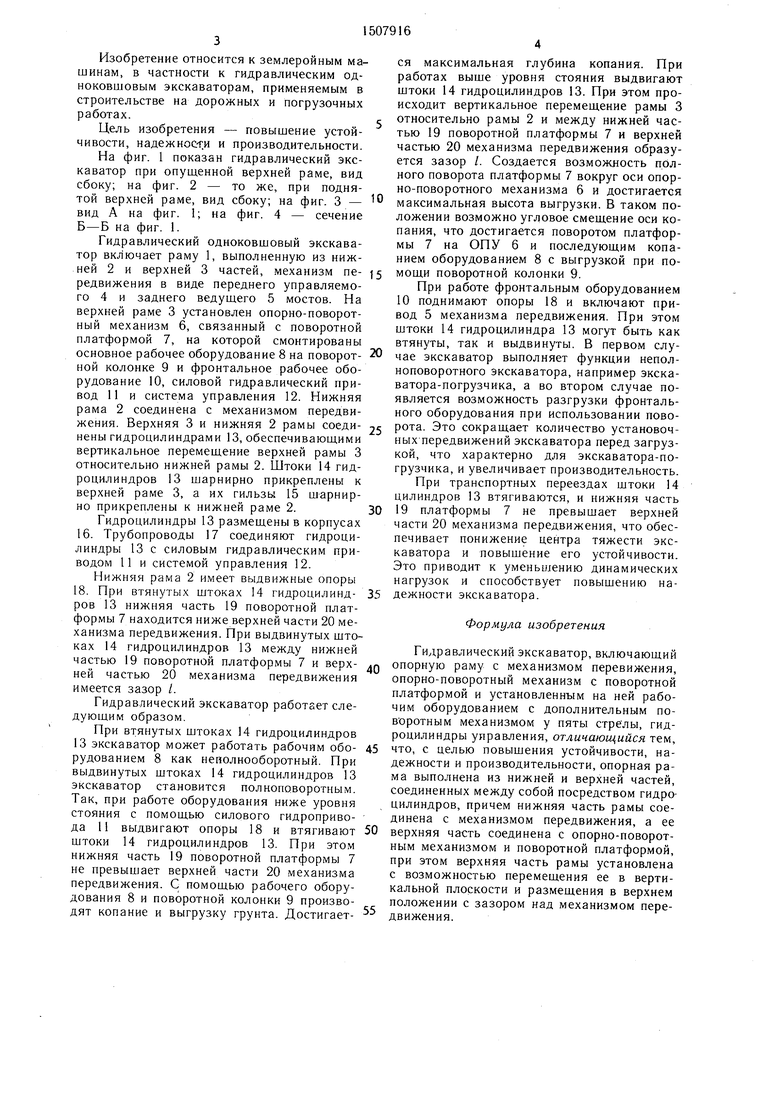
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование прямая лопата гидравлического экскаватора | 2024 |
|
RU2829702C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР-ПОГРУЗЧИК | 1993 |
|
RU2072017C1 |
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |
| Погрузчик-экскаватор | 1991 |
|
SU1803499A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| Экскаватор | 1989 |
|
SU1726667A1 |
| Экскаватор-погрузчик | 1982 |
|
SU1105559A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1997 |
|
RU2122073C1 |
| Экскаватор | 1989 |
|
SU1684437A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
Изобретение относится к землеройным машинам, применяемым в строительстве, на дорожных и погрузочных работах. Цель изобретения - повышение устойчивости, надежности и производительности одноковшовых экскаваторов. Гидравлический одноковшовый экскаватор включает раму 1, выполненную из нижней 2 и верхней 3 частей, и механизм передвижения переднего 4 и заднего 5 мостов. На верхней части 3 установлен опорно-поворотный механизм 6 с поворотной платформой 7, на которой смонтировано рабочее оборудование 8 на поворотной колонке 9 и фронтальное рабочее оборудование 10. Нижняя часть 2 рамы 1 соединена с механизмом передвижения и гидроцилиндрами (ГЦ) 13 с верхней частью 3, которые обеспечивают ее вертикальное перемещение относительно нижней части 2 рамы 1. При втянутых штоках 14 ГЦ 13 экскаватор может работать рабочим оборудованием 8 как неполноповоротный при пониженном центре тяжести. Для повышения устойчивости экскаватора используются выносные опоры 18. При выдвинутых штоках 14 ГЦ 13 экскаватор становится полноповоротным. При этом между нижней частью 19 поворотной платформы 7 и верхней частью 20 механизма передвижения образуется зазор L. Фронтальным оборудованием 10 работа выполняется за счет механизма передвижения и если штоки 14 ГЦ 13 выдвинуты, то экскаватор используется как экскаватор-погрузчик, а если штоки 14 ГЦ 13 втянуты, то как фронтальный погрузчик. 4 ил.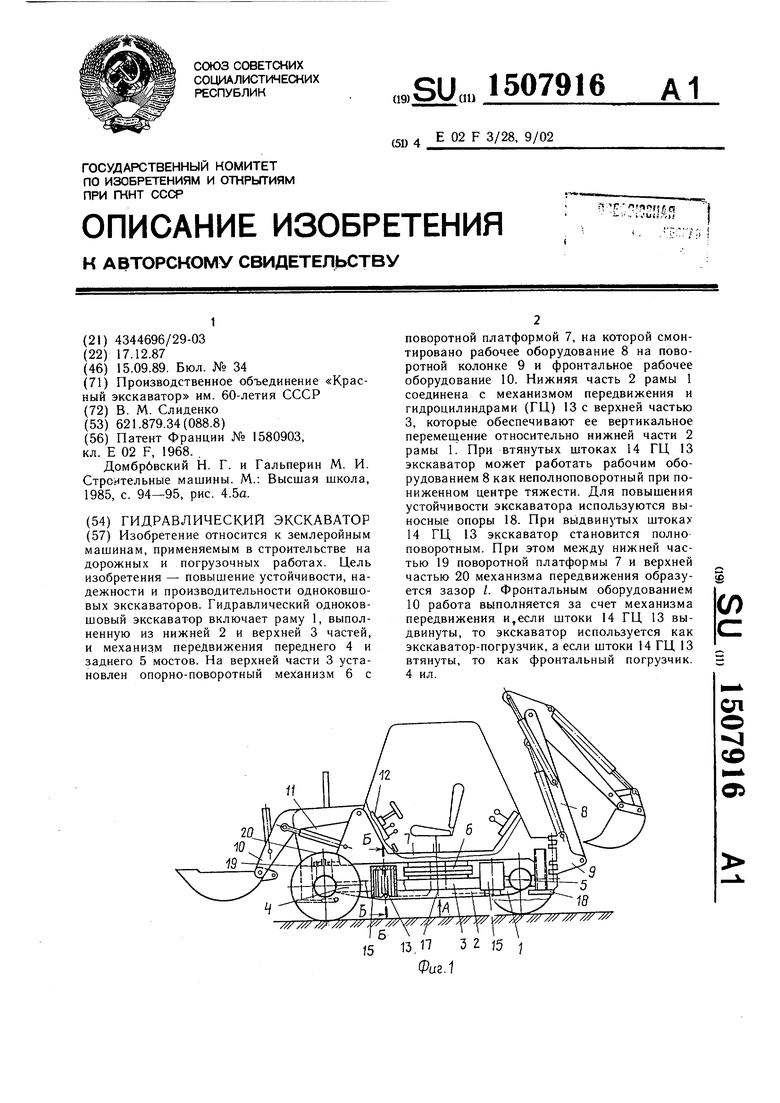
/// ///////////// ///// ////// /
Фие.2
-/3
Фиг.
| Патент Франции № 1580903, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , Домбрбвский Н | |||
| Г | |||
| и Гальперин М | |||
| И | |||
| Строительные машины | |||
| М.: Высшая школа, 1985, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
