Изобретение относится к технологическим средствам машиностроения и предназначено для использования в качестве захватного устройства в промышленных роботах и манипуляторах.
Целью изобретения является расширение технологических возможностей.
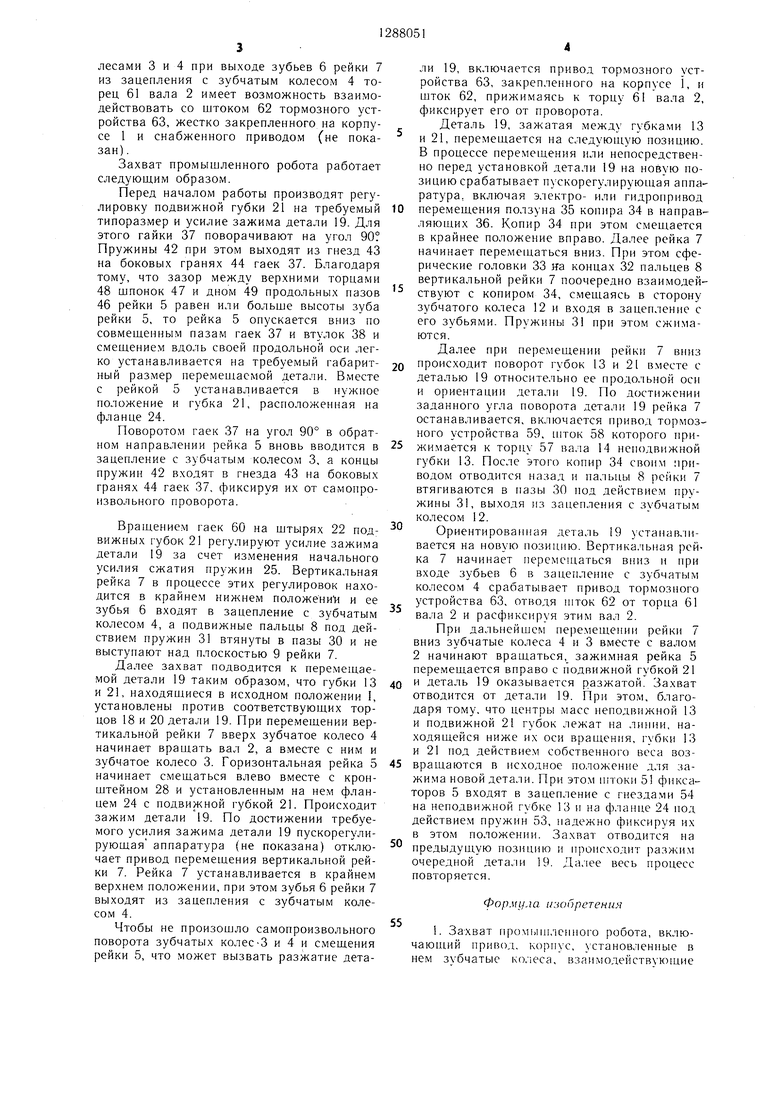
На фиг. 1 изображен захват промышленного робота, обш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1.
Захват промышленного робота состоит из корпуса 1, в котором на валу 2 установлены зубчатые колеса 3 и 4. Зубчатое колесо 3 взаимодействует с горизонтальной рейкой 5, а зубчатое колесо 4 - с рядом зубьев 6 вертикальной рейки 7. Оси реек 5 и 7 расположены под прямым углом друг к другу. Подвижные пальцы 8 вертикальной рейки 7 выполнены на плоскости 9, перпендикулярной плоскости 10, содержашей ряд зубьев 6. Вертикальная рейка 7 установлена с возможностью возвратно-поступательного перемещения во втулках 11,закрепленных в корпусе 1.
Подвижные пальцы 8 вертикальной рейки 7 взаимодействуют с зубчатым колесом 12, жестко связанным с неподвижной губкой 13, жестко установленной на валу 14, размешенном с возможностью врашения в подшипниках 15 опоры 16 кронштейна 17, жестко закрепленного на корпусе 1 захвата. Неподвижная губка 13 взаимодействует с одним торцом 18 детали 19. Противоположный торец 20 детали 19 взаимодействует с подвижной губкой 21.
Подвижная губка 21 установлена с возможностью возвратно-поступательного пере- мешения своими штырями 22 в направляющих 23 фланца 24 и подпружинена пружинами 25 в сторону детали 19. Фланец 24 жестко закреплен на валу 26, установленном с возможностью врашения в опорах 27 кронштейна 28, жестко закрепленного на конце горизонтальной рейки 5. выполненном в виде квадрата 29.
Подвижные пальцы 8 вертикальной рейки 7 выполнены с возможностью возвратно- поступательного перемешения в пазах 30. Расстояние между продольными осями пазом 30 равно шагу зубчатого зацепления. Подвижные пальцы 8 подпружинены в сторону, противоположную зубчатому зацеплению, посредством пружины 31. При этом концы 32 подвижных пальцев 8, на которых установлены пружины 31, поочередно взаимодействуют своими сферическими головками 33, установленными на резьбе с фиксацией от проворота, с копиром 34 при ориентации детали 19. Копир 34 установлен с возможностью возвратно-поступательного пере- меш,ения своим ползуном 35 в направляющей 36, жестко закрепленной на корпусе 1 захвата. Ползун 35 копира 34 жестко связан с приводом перемещения (не показан).
5
Горизонтальная рейка 5 установлена с возможностью возвратно-поступательного перемещения в пазах гаек 37, которые размещены с возможностью поворота на резьбовых концах втулок 38, жестко закрепленных на корпусе 1. Во втулках 38 выполнены пазы 39, оси которых параллельны продольной оси вертикальной рейки 7, взаимодействующие с поверхностью 40 скольжения горизонтальной рейки 5. Гайки 37 снабжены фиксаторами 41 рабочего положения, выполненными в виде пластинчатых пружин 42, взаимодействующих одними концами с гнездами 43 в боковых гранях 44 гаек 37. Другие концы пластинчатых пруr жин 42 жестко закреплены в бобышках 45 корпуса 1.
В рабочем положении оси пазов гаек 37 перпендикулярны осям пазов 39 втулок 38. При этом пазы гаек 37 взаимодействуют с поверхностью 40 скольжения горизонталь0 ной рейки 5, снабженной продольными пазами 46, взаимодействующими со шпонками 47, установленными в пазах 39 втулок 38. Расстояние между верхними торцами 48 шпонок 47 и дном 49 продольных пазов 46 больше или равно высоте зуба горизонтальной рейки 5.
Центры масс подвижной 21 и неподвижной 13 губок смешены вниз и лежат ниже их осей вращения на линии, соединяющей их. Губки 13 и 21 снабжены фиксаторами
Q 50 губок в положении перед зажимом детали 19, выполненными в виде штоков 51, установленных с возможностью возвратно- поступательного перемещения в соответствующих кронштейнах 52, причем один из кронштйнов 52 жестко закреплен на корпу5 се 1, а другой - на кронштейне 28 подвижной губки 21. Штоки 51 подпружинены в сторону губок 13 и 21 пружинами 53, а их концы взаимодействуют с гнездами 54 на боковой грани 55 неподвижной губки 13 и на боковой грани 56 фланца 24 подвижной
0 губки 21.
Торец 57 вала 14 неподвижной губки 13 выполнен с возможностью взаимодействия со штоком 58 тормозного устройства 59, снабженного приводом (не показан). Тормоз- г но,е устройство 59 жестко установлено на кронштейне 17, жестко закрепленном на корпусе 1 захвата.
Усилия сжатия пружин 25 подвижной губки 21 регулируются гайками 60, размещенными на щтырях 22 подвижных губок 21, что позволяет регулировать усилие зажатия детали 19.
Неподвижная 13 и подвижная 21 губки могут занимать положение I (перед зажимом детали 19) и любое заранее заданное поло- 5 жение И при ориентации детали 19 относительно ее продольной оси.
Для предотвращения самопроизвольного проворачивания вала 2 с зубчатыми колесами 3 и 4 при выходе зубьев 6 рейки 7 из зацепления с зубчатым колесом 4 торец 61 вала 2 имеет возможность взаимодействовать со штоком 62 тормозного устройства 63, жестко закрепленного на корпусе 1 и снабженного приводом (не показан) .
Захват промышленного робота работает следующим образом.
Перед началом работы производят регулировку подвижной губки 21 на требуемый типоразмер и усилие зажима детали 19. Для этого гайки 37 поворачивают на угол 90 Пружины 42 при этом выходят из гнезд 43 на боковых гранях 44 гаек 37. Благодаря тому, что зазор между верхними торцами 48 шпонок 47 и дном 49 продольных пазов 46 рейки 5 равен или больше высоты зуба рейки 5, то рейка 5 опускается вниз по совмешенным пазам гаек 37 и втулок 38 и смещением вдоль своей продольной оси легко устанавливается на требуемый габаритный размер перемещаемой детали. Вместе с рейкой 5 устанавливается в нужное положение и губка 21, расположенная на фланце 24.
Поворотом гаек 37 на угол 90° в обратном направлении рейка 5 вновь вводится в зацепление с зубчатым колесом 3, а концы пружин 42 входят в гнезда 43 на боковых гранях 44 гаек 37, фиксируя их от самопроизвольного проворота.
Вращением гаек 60 на штырях 22 подвижных губок 21 регулируют усилие зажима детали 19 за счет изменения начального усилия сжатия пружин 25. Вертикальная рейка 7 в процессе этих регулировок находится в крайнем нижнем положени и и ее зубья 6 входят в зацепление с зубчатым колесом 4, а подвижные пальцы 8 под действием пружин 31 втянуты в пазы 30 и не выступают над плоскостью 9 рейки 7.
Далее захват подводится к перемещаемой детали 19 таким образом, что губки 13 и 21, находящиеся в исходном положении I, установлены против соответствующих торцов 18 и 20 детали 19. При перемещении вертикальной рейки 7 вверх зубчатое колесо 4 начинает вращать вал 2, а вместе с ним и зубчатое колесо 3. Горизонтальная рейка 5 начинает смещаться влево вместе с кронштейном 28 и установленным на нем фланцем 24 с подвижной губкой 21. Происходит зажим детали 19. По достижении требуемого усилия зажима детали 19 пускорегули- рующая аппаратура {не показана) отключает привод перемещения вертикальной рейки 7. Рейка 7 устанавливается в крайнем верхнем положении, при этом зубья 6 рейки 7 выходят из зацепления с зубчатым колесом 4.
Чтобы не произошло самопроизвольного поворота зубчатых колес-3 и 4 и смещения рейки 5, что может вызвать разжатие дета
5
0
5
0
5
0
5
0
5
ли 19, включается привод тормозного устройства 63, закрепленного на корпусе 1, и шток 62, прижимаясь к торцу 61 вала 2, фиксирует его от проворота.
Деталь 19, зажатая между губками 13 и 21, перемещается на следующую позицию. В процессе перемещения или непосредственно перед установкой детали 19 на новую позицию срабатывает пускорегулирующая аппа- ратура. включая электро- или гидропривод перемещения ползуна 35 копира 34 в направляющих 36. Копир 34 при этом смещается в крайнее положение вправо. Далее рейка 7 начинает перемещаться вниз. При этом сферические головки 33 на концах 32 пальцев 8 вертикальной рейки 7 поочередно взаимодействуют с копиром 34, смещаясь в сторону зубчатого колеса 12 и входя в зацепление с его зубьями. Пружины 31 при этом сжимаются.
Далее при перемещении рейки 7 вниз происходит поворот губок 13 и 21 вместе с деталью 19 относительно ее продольной оси и ориентации детали 19. По достижении заданного угла поворота детали 19 рейка 7 останавливается, включается привод тормозного устройства 59, шток 58 которого прижимается к торцу 57 вала 14 неподвижной губки 13. После этого копир 34 своим приводом отводится назад и пальцы 8 рейки 7 втягиваются в пазы 30 под действием пружины 31, выходя из зацепления с зубчатым колесом 12.
Ориентированная деталь 19 станавли- вается на новую позицию. Вертикальная рейка 7 начинает перемещаться вниз и при входе зубьев 6 в зацепление с зубчатым колесом 4 срабатывает привод тормозного устройства 63, отводя шток 62 от торца 61 вала 2 и расфиксируя этим вал 2.
При дальнейшем перемещении рейки 7 вниз зубчатые колеса 4 и 3 вместе с валом 2 начинают вращаться, зажимная рейка 5 перемещается вправо с подвижной губкой 21 и деталь 19 оказывается разжатой. Захват отводится от детали 19. При этом, благодаря тому, что центры масс неподвии ной 13 и подвижной 21 губок лежат на линии, находящейся ниже их оси вращения, губки 13 и 21 под действием собственного веса возвращаются в исходное положение для зажима новой детали. При этом штоки 51 фиксаторов 5 входят в зацепление с гнездами 54 на неподвижной губке 13 и на фланце 24 под действием пружин 53, надежно фиксируя их в этом положении. Захват отводится на предыдущую позицию и происходит разжим очередной детали 19. Далее весь процесс повторяется.
Формула изоС ретения
1. Захват промьмпленного робота, включающий привод, корпус, установленные в нем зубчатые ко.-.еса, взаимодействующие
с реЙЕОми, и губки, отличающийся тем, что, с целью расширения технологических возможностей, захват снабжен приспособлением для переналадки на детали различных типоразмеров, а одна из реек снабжена жест- ко закрепленным кронштейном, на котором установлена подпружиненная губка с возможностью враш,ения, а во второй рейке выполнены пазы, в которых расположены дополнительно введенные подпружиненные пальцы, имеющие возможность возвратно- поступательного перемещения, причем расстояние между осями пазов равно шагу зубчатого колеса, жестко закрепленного на поворотной губке, установленной на корпусе захвата с возможностью вращения, кроме того, подпружиненные пальцы одними своими свободными концами имеют возможность взаимодействия с зубчатым колесом поворотной губки, а другими - с дополнительно введенным копиром, расположенным
на корпусе захвата и имеющим возмож- 20 вата деталей.
ность перемещения посредством соответствующего привода.
2.Захват по п. 1, отличающийся тем, что приспособление для переналадки схвата на детали различных типоразмеров выполнено в виде гаек, установленных с возможностью вращения на втулках, жестко закрепленных на корпусе схвата, при этом гайки снабжены фиксаторами и пазами, в которых установлена с возможностью возвратно-поступательного перемещения рейка с зажимной губкой, кроме того, в рейке выполнен паз, в котором расположена шпонка, закрепленная во втулке, а расстояние между верхними торцами щпонок и дном паза рейки больще или равно высоте зуба рейки.
3.Захват по п. 1, отличающийся тем, что зажимная и неподвижная губки выполнены со смещенными центрами масс и снабжены фиксаторами губок в положении зах6-6
«
В В
-M-.d- Риг
J2 0 8
I m.
36 3 .г.З
иг.
Редактор И. Николайчук Заказ 7756/15
Составитель А. Чернышев
Техред И. Верес .Корректор О. Луговая
Тираж 976Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4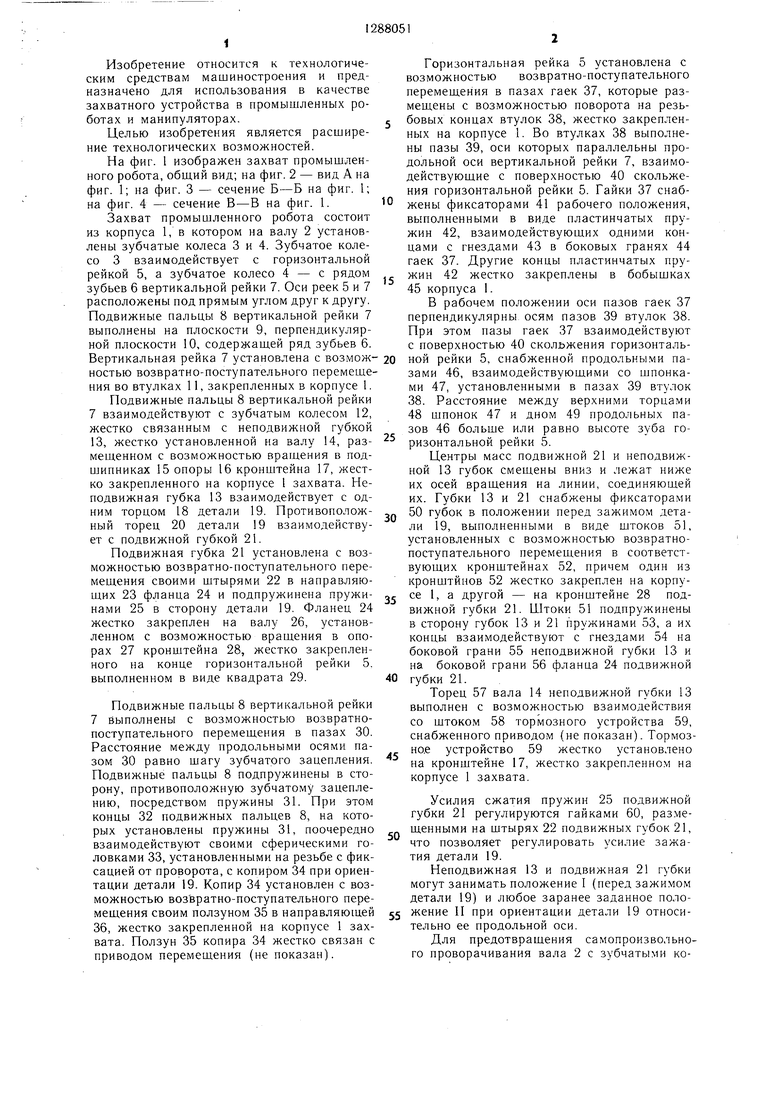
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |

Изобретение относится к техноло- гически.м средствам машиностроения и предназначено для использования в качестве захватного устройства в промышленных роботах и манипуляторах. Целью изобретения является расширение технологических возможностей. Захват состоит из корпуса 1, в котором установлены зубчатые колеса 3 и 4, взаимодействующие с рейками 5 и 7, в г-r4i x7ff / установленными взаимно перпендикулярно. На горизонтальной рейке (ГР) 5 установлена подпружиненная губка 21. Вертикальная рейка (ВР) 7 снабжена пазами 30, в которых расположены подпружиненные пальцы 8, взаимодействуюндие одними концами с зубчатым колесом 12, а другими - с копиром. Переналадка захвата для деталей различных типораз.меров осуществляется с помощью гаек 37. При перемещении приводом ВР 7 вверх через зубчатые колеса 4 и 3 и ГР 5 происходит зажим детали. Для поворота детали 19 относительно своей продольной оси включается привод копира. Разжатие детали 19 происходит при перемещении ВР 7 вниз. Т.к. центры масс губок 13 и 21 лежат ниже их осей вращения, они вернутся в исходное положение после отвода захвата от детали 19 и зафиксируются фиксаторами 50. 2 з.п.ф-лы, 4 ил. а (Л 1чЭ 00 00 о ел . сгз 8ог5 2 т г1 
| Захват | 1976 |
|
SU610668A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
