Изобретение относится к обработке металлов давлением и может быть использовано для удаления деталей из рабочей зоны пресса.
Целью изобретения является расширение технологических возможностей устройства.
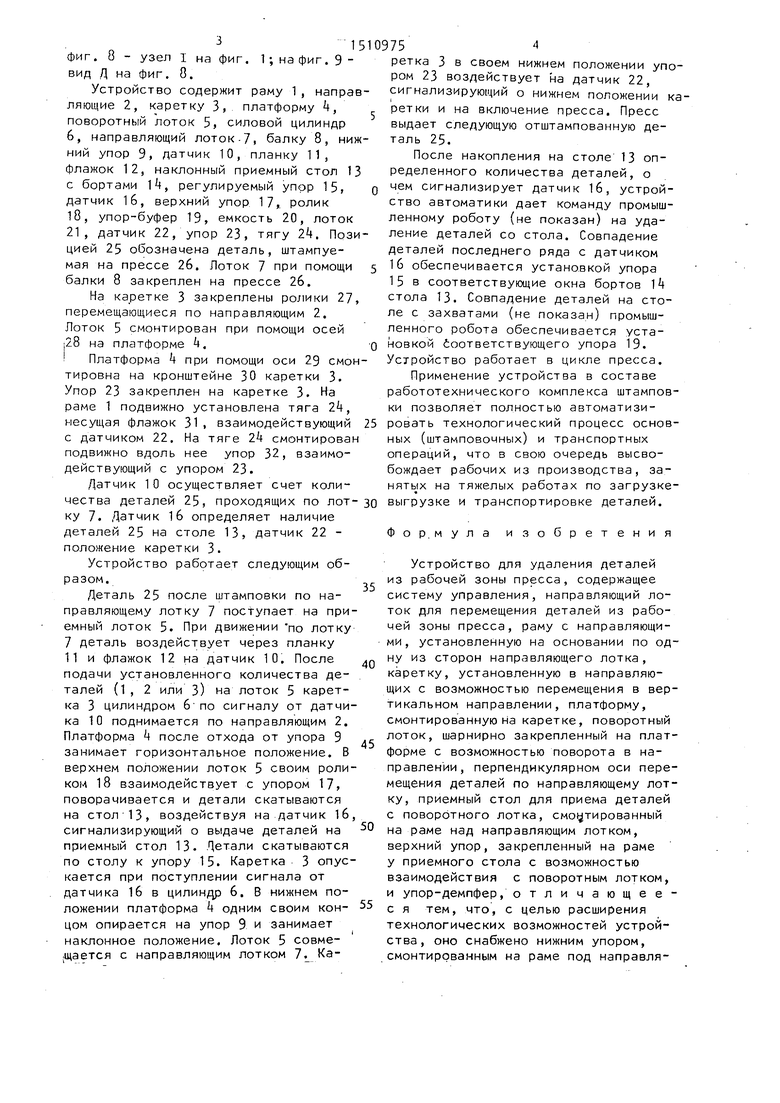
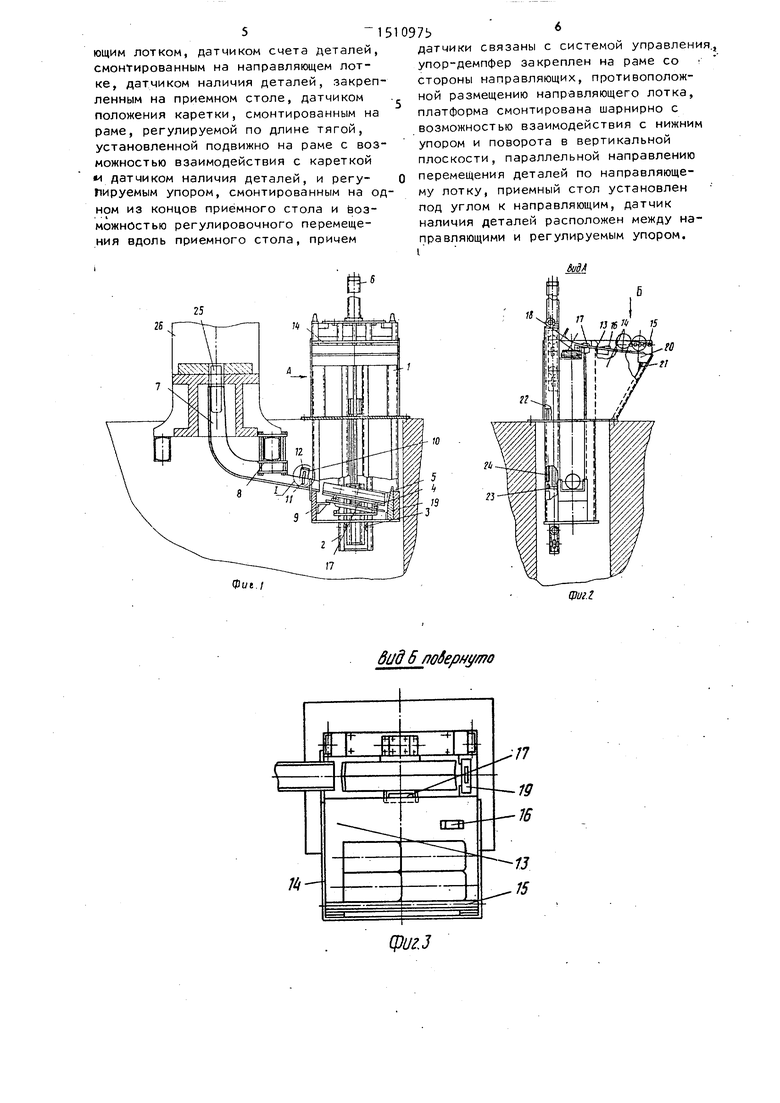
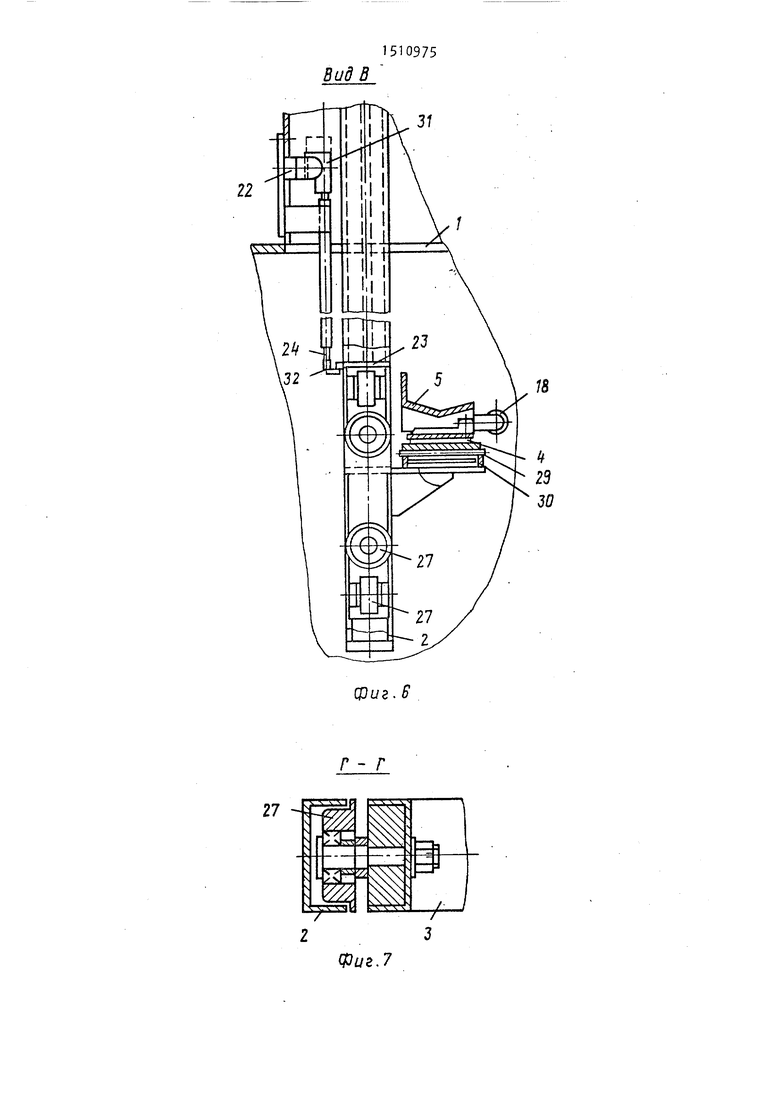
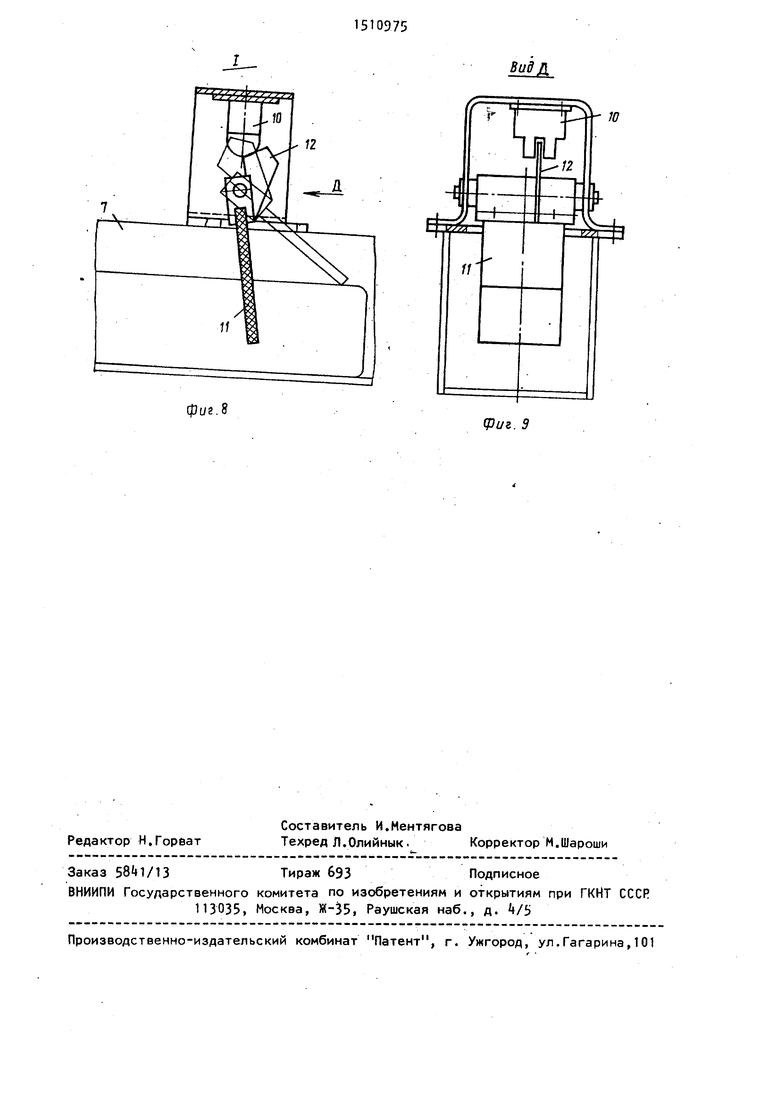
На фиг. 1 изображено устройство для удаления деталей из рабочей зоны пресса; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. - поворотный лоток; на фиг. 5 каретка; на фиг. 6 - вид В на фиг. 5; на фиг. 7 - разрез-Г-Г на фиг. 5; на
фиг. 8 - узел I на фиг. 1 ; на фиг. 9 - вид Д на фиг. 8.
Устройство содержит раму 1 , направляющие 2, каретку 3, платформу 4, поворотный лоток 5, силовой цилиндр 6, направляющий лоток-7, балку 8, нижний упор 9, датчик 10, планку 11, флажок 12, наклонный приемный стол 13 с бортами 1, регулируемый упор 15, датчик 16, верхний упор 17,. ролик 18, упор-буфер 19, емкость 20, лоток 21, датчик 22, упор 23, тягу 2k. Позицией 25 обозначена деталь, штампуемая на прессе 2б. Лоток 7 при помощи балки 8 закреплен на прессе 2б.
На каретке 3 закреплены ролики 27 перемещающиеся по направляющим 2. Лоток 5 смонтирован при помощи осей ,28 на платформе А.
Платформа k при помощи оси 29 смон тировна на кронштейне 30 каретки 3. Упор 23 закреплен на каретке 3. На раме 1 подвижно установлена тяга 2k, несущая флажок 31. взаимодействующий с датчиком 22. На тяге 2k смонтирован подвижно вдоль нее упор 32, взаимодействующий с упором 23.
Датчик 10 осуществляет счет количества деталей 25, проходящих по лот- ку 7. Датчик 1б определяет наличие деталей 25 на столе 13, датчик 22 - положение каретки 3.
Устройство работает следующим образом.
Деталь 25 после штамповки по направляющему лотку 7 noctynaeT на приемный лоток 5. При движении по лотку 7 деталь воздействует через планку 11 и флажок 12 на датчик 10. После подачи установленного количества деталей (1, 2 или З) на лоток 5 каретка 3 цилиндром 6 по сигналу от датчика 10 поднимается по направляющим 2. Платформа k после отхода от упора 9 занимает горизонтальное положение. В верхнем положении лоток 5 своим роликом 18 взаимодействует с упором 17, поворачивается и детали скатываются на стол 13, воздействуя на датчик 1б, сигнализирующий о выдаче деталей на приемный стол 13. Детали скатываются по столу к упору 15. Каретка 3 опускается при поступлении сигнала от датчика 16 в цилиндр 6. В нижнем положении платформа k одним своим кон- цом опирается на упор 9 и занимает наклонное положение. Лоток 5 совме- дается с направляющим лотком 7. Ка1
1510975
о
О
25
зо
5
5
0
5
0
ретка 3 в своем нижнем положении упором 23 воздействует на датчик 22, сигнализирующий о нижнем положении каретки и на включение пресса. Пресс выдает следующую отштампованную деталь 25.
После накопления на столе 13 определенного количества деталей, о чем сигнализирует датчик 1б, устройство автоматики дает команду промышленному роботу (не показан) на удаление деталей со стола. Совпадение деталей последнего ряда с датчиком 16 обеспечивается установкой упора 15 в соответствующие окна бортов k стола 13. Совпадение деталей на столе с захватами (не показан) промышленного робота обеспечивается установкой Соответствующего упора 19. Устройство работает в цикле пресса.
Применение устройства в составе работотехнического комплекса штамповки позволяет полностью автоматизировать технологический процесс основных (штамповочных) и транспортных операций, что в свою очередь высвобождает рабочих из производства, занятых на тяжелых работах по загрузке- выгрузке и транспортировке деталей.
Фор.мула изобретения
Устройство для удаления деталей из рабочей зоны пресса, содержащее систему управления, направляющий лоток для перемещения деталей из рабочей зоны пресса, раму с направляющими, установленную на основании по одну из сторон направляющего лотка, каретку, установленную в направляющих с возможностью перемещения в вертикальном направлении, платформу, смонтированную на каретке, поворотный лоток, шарнирно закрепленный на платформе с возможностью поворота в направлении, перпендикулярном оси перемещения деталей по направляющему лотку, приемный стол для приема деталей с поворотного лотка, смонтированный на раме над направляющим лотком, верхний упор, закрепленный на раме у приемного стола с возможностью взаимодействия с поворотным лотком, и упор-демпфер, отличающее- с я тем, что, с целью расширения технологических возможностей устройства, оно снабжено нижним упором, смонтированным на раме под направля25
2В
Фое./
Mf
11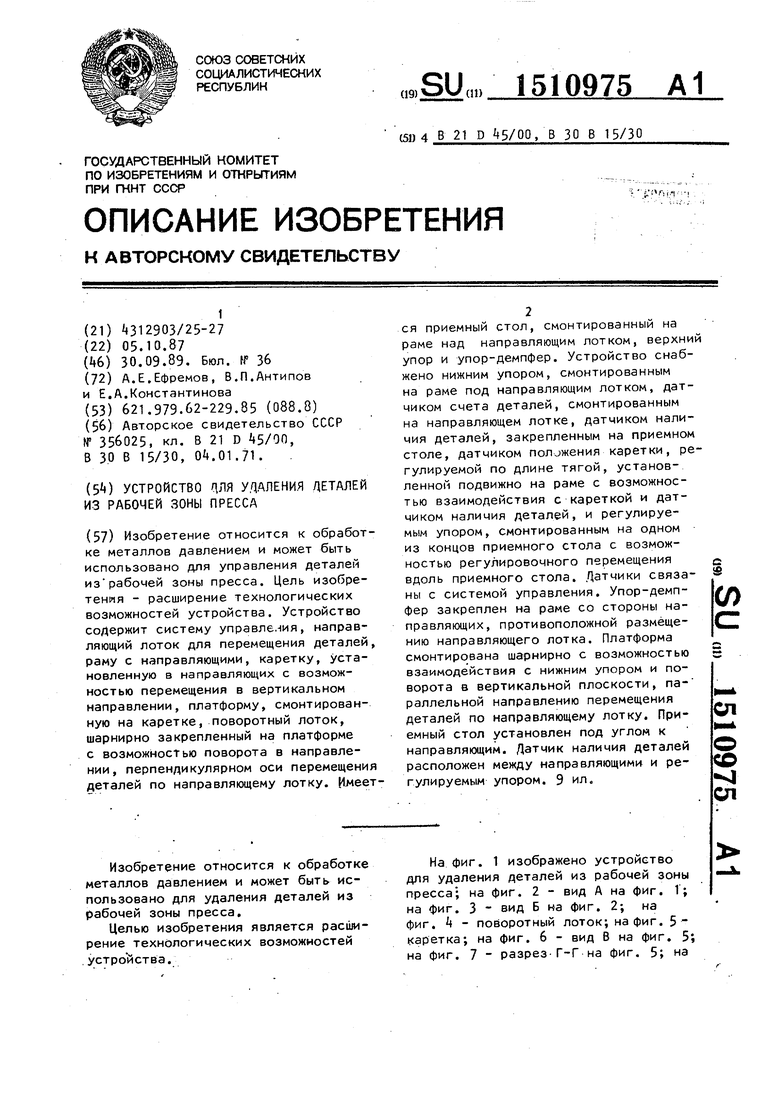
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной подачи заготовок в рабочую зону пресса с одновременным их смачиванием | 1987 |
|
SU1493365A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ДЕТАЛЕЙ ИЗ РАБОЧЕЙ ЗОНЫ ПРЕССА | 2004 |
|
RU2267375C2 |
| Устройство для поштучной подачи заготовок в рабочую зону пресса с одновременным их смачиванием | 1987 |
|
SU1518063A1 |
| Устройство для поштучной выдачи заготовок | 1973 |
|
SU500857A1 |
| Полуавтоматическая линия для сборки,преимущественно,петель | 1983 |
|
SU1088912A1 |
| Устройство для укладки штучных изделий в пакет | 1988 |
|
SU1643368A1 |
| Линия горячей штамповки | 1983 |
|
SU1119826A1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU729085A1 |
| Устройство для обработки штучных заготовок | 1988 |
|
SU1538964A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для удаления деталей из рабочей зоны пресса. Цель изобретения - расширение технологических возможностей устройства. Устройство содержит систему управления, направляющий лоток для перемещения деталей, раму с направляющими, каретку, установленную в направляющих с возможностью перемещения в вертикальном направлении, платформу, смонтированную на каретке, поворотный лоток, шарнирно закрепленный на платформе с возможностью поворота в направлении, перпендикулярном оси перемещения деталей по направляющему лотку. Имеется приемный стол, смонтированный на раме над направляющим лотком, верхний упор и упор- демпфер. Устройство снабжено нижним упором, смонтированным на раме под направляющим лотком, датчиком счета деталей, смонтированным на направляющем лотке, датчиком наличия деталей, закрепленным на приемном столе, датчиком положения каретки, регулируемой по длине тягой, установленной подвижно на раме с возможностью взаимодействия с кареткой и датчиком наличия деталей, и регулируемым упором, смонтированным на одном из концов приемного стола с возможностью регулировочного перемещения вдоль приемного стола. Датчики связаны с системой управления. Упор- демпфер закреплен на раме со стороны направляющих, противоположной размещению направляющего лотка. Платформа смонтирована шарнирно с возможностью взаимодействия с нижним упором и поворота в вертикальной плоскости, параллельной направлению перемещения деталей по направляющему лотку. Приемный стол установлен под углом к направляющим. Датчик наличия деталей расположен между направляющими и регулируемым упором. 9 ил.
вид 6 noSepH(
(PU13
фиг. 5
/7 J
фи.
27
Г - Г
27
. ,
Ч .УУЛ
23
Фиг.7
зт
фиг.в
s
фиг.8
(puz. 9
| УСТРОЙСТВО для УДАЛЕНИЯ ДЕТАЛЕЙ ИЗ РАБОЧЕЙ ЗОНЫ ПРЕССА | 0 |
|
SU356025A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
