Изобретение относится к робототехнике и может быть использовано при создании промышленных роботов, выполняющих сборочные операции.
Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения фиксации регулируемых координат в промежуточной точке позиционирования.
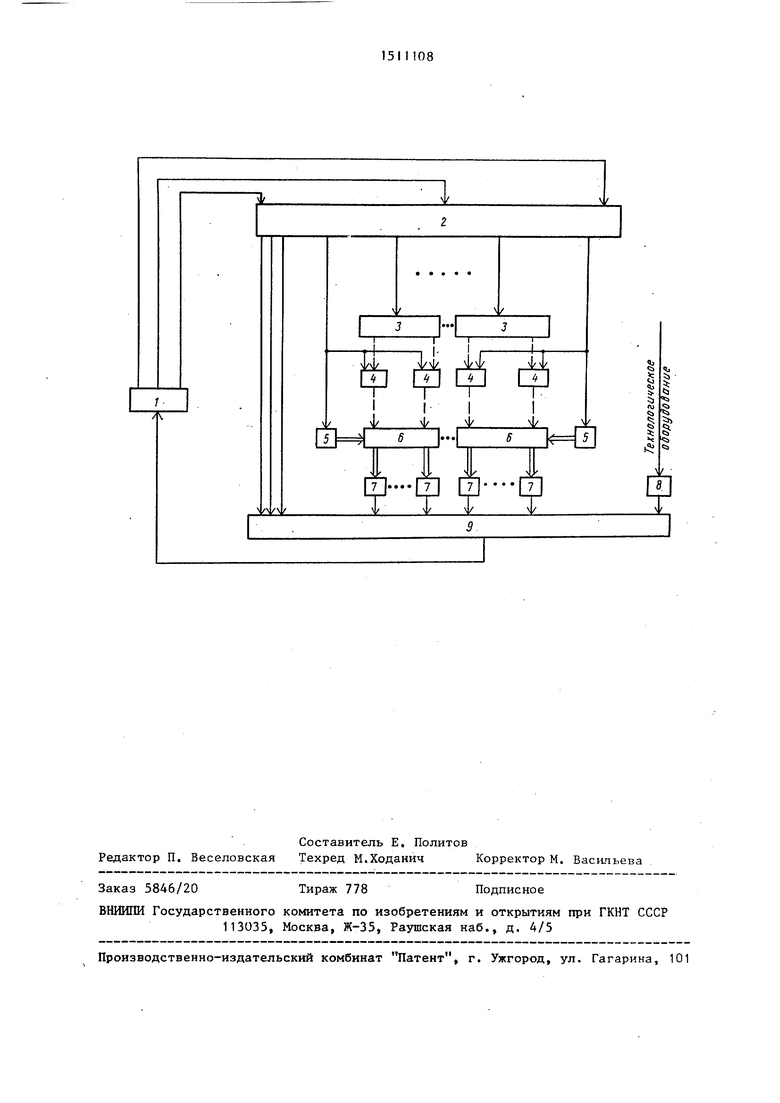
На чертеже представлена функциональная схема устройства.
Устройство содержит счетчик 1, блок 2 задания программы, электромагнитные распределители 3, ключи 4, электромагнитные муфты 5, силовые цилиндры 6, первые 7 и второй 8 датчики положения и мультиплексор 9.
Устройство работает слещующим образом.
В первом кадре программы из блока 2 выдается следующая информация: направление движения силового цилиндра требуемой координаты, номер датчика 7 или 8 и состояние тормозных муфт 5. Номер датчика 7 или 8 точки позиционирования задается в виде двоичного кода, поступающего на адресные входы мультиплексора 9, в результате чего на его выходе устанавливается уровень лоп ческого О, так как робот еще не вышел в заданную точку и сигнал датчика 7 или 8 соответствует уровню логического О . Этот уровень поступает на вход счетчика кадров и блокирует изменение состояния его выходов, а следовательно, и выдачу следующего адреса кадра программы. Происходит отработка
СП
00
3- 1
соответствующей координаты и выход в .запрограммированную точку, о чем свидетельствует уровень логической I, поступающей с датчика 7 заданной точки позиционирования. Уровень логической единицы поступает- через мультиплексор 9 на вход счетчика I и изменяет состояние его выходов, происходит смена адреса кадра программы, и из блока 2 поступает информация о следующем кадре, в том числе и информация о состоянии тормозной муфты 5 той координаты, которая отработана в предыдущем кадре; штанга силового цилиндра 6, а через нее и шток силового цилиндра могут быть зафиксированы в запрограммированной точке или могут продолжать движение, если э.та точка не конечная. При фиксации силового цилиндра 6 происходит отключение электромагнитов ключей 4, а следовательно, и перекрытие доступа воздух или масла в рабочие полости цилиндра 6.
ЕСЛИ выход схвата манипулятора в жестко запрограммированную точку может привести к поломке конструкци манипулятора или технологического оборудования, а это возможно при больших разбросах в позиционировани технологического оборудования, то в этом случае движение любой коорди- наты робота происходит до момента срабатьшания датчика 8 плавающей
84
точки позиционирования, Воздейстг- вие на датчик 8, расположенный в районе схвата, оказывает не штанга силового цилиндра 6 манипулятора, а конструктивные элементы технологического оборудования.
Формула изобретения
Устройство для управления промьш1т ленным роботом, содержащее счетчик, выходы которого соединены с входами блока задания программы, и по каждой регулируемой координате электромагнитные распределители, вход каждого из которых подключен к соответствую- щему первому выходу блока задания программы, а выходы - через соответствующие ключи к входам соответствующего силового цилиндра, связанного с соответствующими первыми датчиками положения, отличающееся тем, что, с целью расширения функциональных возможностей, оно содержит мультиплексор, второй датчик положения и по каждой регулируемой координате связанную с силовым цилиндром электромагнитную муфту, вход каждой из которой соединен со вторьм входом
соответствующих ключей и с соответст- вующим первым выходом блока задания программы, подключенного вторыми выходами к первым входам мультиплексора, выход которого соединен с входом
счетчика, а вторые входы - с выходами первых и второго датчиков положения.
Составитель Е. Политов Редактор П. Веселовская Техред М.Ходанич Корректор М. Васильева
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления манипулятором | 1985 |
|
SU1315291A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для циклового управления промышленным роботом | 1982 |
|
SU1037211A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2054349C1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Цикловая система программного управления манипулятором | 1990 |
|
SU1812100A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
Изобретение относится к робототехнике и может быть использовано при создании промышленных роботов, выполняющих сборочные операции. Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения фиксации регулируемых координат в промежуточной точке позиционирования. В устройство, содержащее счетчик, блок задания программы, электромагнитные распределители, ключи и первые датчики положения, введены мультиплексор, второй датчик положения и электромагнитные муфты. При обработке программы производится перемещение координат не до их конечных положений, а до промежуточной точки, обуславливаемой срабатыванием второго датчика положения, который расположен в районе схвата робота, с последующей фиксацией, если это необходимо, силовых цилиндров координат с помощью соответствующих электромагнитных муфт. 1 ил.
Заказ 5846/20
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
