4
05
|С
4
Изобретение относится к робототехнике и может быть использовано при создании сборочных роботов.
Цель изобретения - новышение точности устройства за счет исключения заклинива- ния собираемых деталей при их вертикальной несоосности.
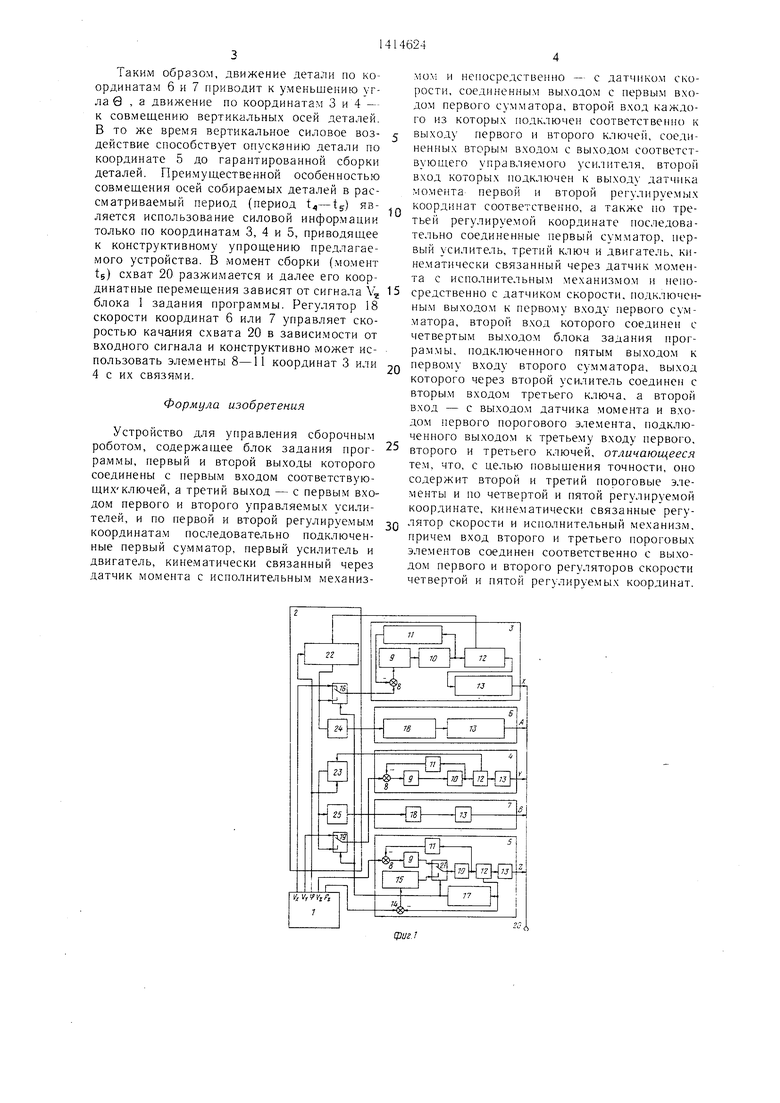
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - диаграмма движения регулируемых координат.
Устройство содержит блок 1 задания программы, блок 2 коррекции соборочного процесса, первую 3, вторую 4, третью 5, четвертую 6 и пятую 7 регулируемые координаты, первые сумматоры 8, первые усилители 9, двигатели 10, датчики 11 и 12 скорости и момента соответственно, исполнительные механизмы 13, второй сумматор 14, второй усилитель 15, первый ключ 16, первый пороговый элемент 17, регулятор 18 скорости, второй ключ 19, схват 20, третий ключ 21, первый и второй управляемые усилители 22 и 23 соответственно, второй и третий пороговые элементы 24 и 25 соответственно.
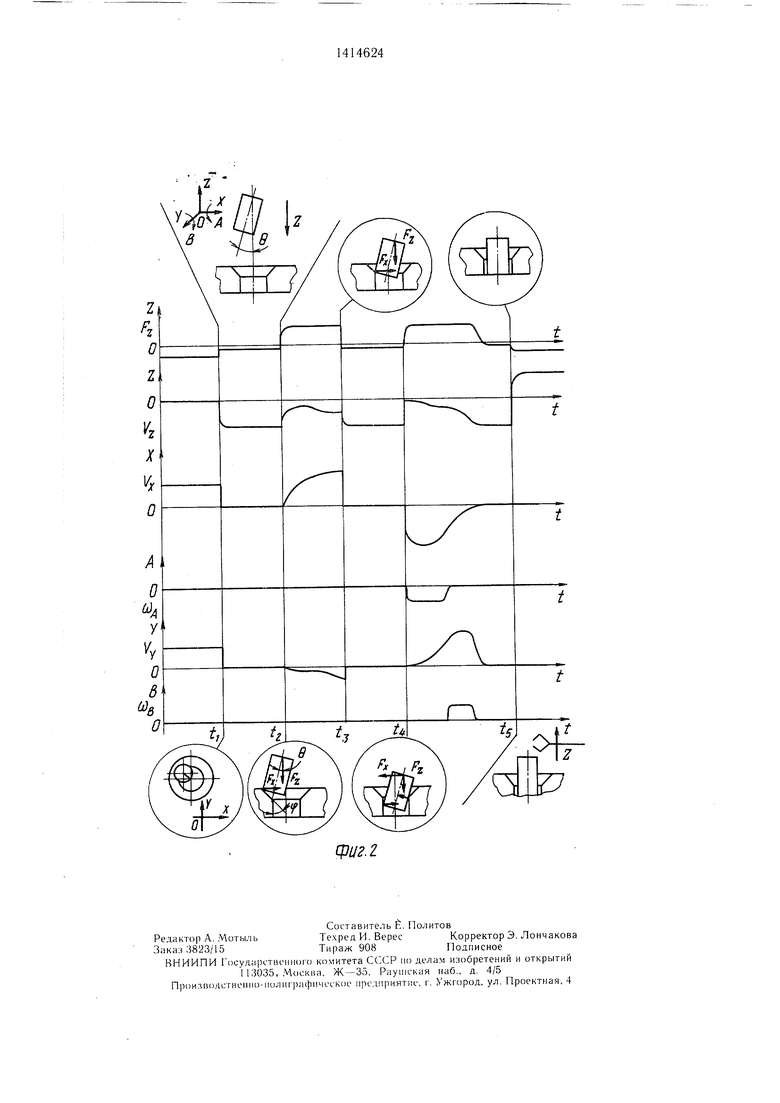
На фиг. 1 и 2 обозначены У;. Vy, Lp , V. и 1 - выходные сигналы блока 1; 8 - у1Ч)л пепараллельности осей собираемых де- талей; u) и ю - угловые скорости координат 6 и 7.
Устройство работает следующим образом.
Для вывода детали на позицию сборки схватом робота (другая деталь является ба- зоной и укреплена неподвижно, причем возможна непараллельность координатных осей дета.пей, вызванная технологическими и конструктивными причинами па угол 0 сигналы с выходов блока I задания программы Vx , Vy сообщают координатам 3 и 4 скорости нереме1цения. Каждый сигнал с выхода V или Vy проходит через ключ 16 или 19 на сумматор 8 соогветствующей координаты 3 И.1И 4 и далее через усилитель 9 на двигатель 10, затем движение через датчик 12 мо.мента передается на исполнительный механизм 13 (интервал времени О-t,). С датчика 12 .момента снимается сигнал, соответствующий развиваемому момепту сопротивления фи преобразованной через исполнительный механизм 13 силе воздействия схвата по действующей координате 3 или 4.
После вывода схвата 20 в режим сборки сигналы с выходов Vx и у нулевые, сигнал V усфавляет скоростью движения по координате 5 до соприкосновения деталей (ин- тервал 1,-tj.) аналогично перемещению двигателей 10 по координатам 3 и 4. В момент соприкосновепия деталей (момент времепи tj.) сигпал с датчика 12 момента координаты 5 гфевышает порог срабатывания порогового элемента 17 и переключает ключ 21. Вход двигателя 10 соединен с выходом второго усилителя 15. Сигнал F с выхода блока 1 управляет с данного момента силой
0 5
5
возд.ействия координаты Z. Деталь-отверстие имеет угол ц - угол фаски детали, Fj - вертикальная сила воздействия, F - реактивная сила по одной из горизонтальных координат (например. У), причем Fx Fj ctg-ф. Это соотношение заложено в самОдМ взаимодействии деталей, чем больше отклонение центров осей координат деталей по одной из горизонтальных координат, тем больше сила реакции по этой координате. Эта взаимосвязь заложена в блок 2 коррекции сборочного процесса.
Таким образом, с момента действия силы Fj (момент t) реактивные силы F и Fy через исполнительные механиз.мы 13 и датчики 12 моментов координат 3 и 4 в виде сигналов через угфавляемые усилители 22 и 23 подключаются к ключам 16 и 19. К этому моменту сигнал с порогового эле.мента 17 переключает ключи 16 и 19 на связь сигналом реактивных сил с управляющими входами сумматоров 8 соответственно координат 3 и 4. В момент совмещения центров образующих деталей вала и отверстия (момент tj) сигнал с датчика 12 момента координаты 5 не проходит через пороговый эле- мепт 17, что ведет через ключи 16, 19 и 21 к связи сигналов с выходов блока 1 соответственно Vx, V,,, z с входами сумматоров 8 соответственно координат 3, 4 и 5. Так как в это время по программе только выход V не обнулен, деталь опускается по координате 5 (интервал tj-t).
При наличии непараллельности, а именно угла 0 между координатными осями собираемых деталей (момент t), происхОд1ит заклинивание деталей. Сигнал FZ управляет силой воздействия по координате 5, а пороговый элемент 17 переключает ключи 16 н 19 на угфавление координатами 3 и 4 от управляемых усилителей 22 и 23. Сигнал выхода - блока 1 угфавляет коэффициентом усиления усилителей 22 и 23, моделируя igif , а также коэффициент трения между собираемыми деталями.
С датчиков 12 момента координат 3 и 4 на управляемые усилители 22 и 23 (фиг. 2) поступают сигналы, противоположные по знаку, нежели при движении деталей по фаске, т.е. способствуют еще большему заклиниванию деталей. Но в какой-то момент (интервал ) сигнал с управляемого усилителя 22 (23) превышает порог срабатывания порогового элемента 24(25) и на вход регулятора 18 скорости координаты 6(7) поступает постоянный сигнал. Происходит ка-. чание схвата по координате 6 (вращение вокруг горизонтальной оси X) и по координате 7 (вращение вокруг горизонтальной оси Y). Постоянный сигнал с пороговых элементов 24 или 25 должен соответствовать скорости качания
Vx/l или cOg, Vtp/1. где 1 - длина детали вала.
Таким образом, движение детали по координатам 6 и 7 приводит к уменьшению угла G , а движение по координатам 3 и 4 - к совмещению вертикальных осей деталей. В то же время вертикальное силовое воздействие способствует опусканию детали по координате 5 до гарантированной сборки деталей. Преимущественной особенностью совмещения осей собираемых деталей в рассматриваемый период (период t,- t) является использование силовой инфор.мации только по координата.м 3, 4 и 5, приводящее к конструктивному упрощению предлагаемого устройства. В момент сборки (момент tg) охват 20 разжимается и далее его координатные перемещения зависят от сигнала У блока 1 задания программы. Регулятор 18 скорости координат 6 или 7 управляет скоростью качания схвата 20 в зависимости от входного сигнала и конструктивно может ис- пользовать элементы 8-11 координат 3 или 4 с их связями.
Формула изобретения
Устройство для управления сборочным роботом, содержащее блок задания прог- ра.ммы, первый и второй выходы которого соединены с первым входом соответствующих-ключей, а третий выход - с первым входом первого и второго управляемых усилителей, и по первой и второй регулируемым координатам последовательно подключенные первый сумматор, первый усилитель и двигатель, кине.матически связанный через датчик момента с исполнительным механиз0
5 Q
5 п
мом и непосредственно - с датчиком скорости, соединенным выходом с первым входом первого сумматора, второй вход каждого из которых подключен соответственно к выходу первого и второго ключе)), соединенных вторым входом с выходом соответствующего управляемого усилителя, второй вход которых подключен к выходу датчика момента первой и второй регулируемых координат соответственно, а также но третьей регулируемой координате последовательно соединенные первый сумматор, первый усилитель, третий ключ и двигатель, кине.матически связанный через датчик .момента с исполнительным .механизмо.м и непосредственно с датчиком скорости, подк, 1ючен- ным выходо.м к первому входу первого сумматора, второй вход которого соединен с четвертым выходом блока задания программы, подключенного пятым вы.чодом к первому входу второго сумматора, выход которого через второй усилитель соединен с вторы.м входом третьего ключа, а второй вход - с выходом датчика момента и входом первого порогового элемента, подключенного вы.кодом к третьему входу первого, второго и третьего ключей, отличающееся тем, что, с целью повышения точности, оно содержит второй и третий пороговые элементы и по четвертой и пятой регулируемой координате, кинематически связанные регулятор скорости и исполнительный механизм, причем вход второго и третьего пороговых элементов соединен соответственно с выходом первого и второго регуляторов скорости четвертой и пятой регулируемых координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1985 |
|
SU1247839A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |
| Устройство для управления сборочным роботом | 1981 |
|
SU989534A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
Изобретение относится к области робототехники и может быть использовано при создании сборочных роботов. Цель изобретения - повышение точности устройства за счет исключения заклинивания собираемых деталей при их вертикальной несоосности. Для этого введены два шаговых элемента и две регулируемые координаты качания схвата. 2 ил.
z о
2
X
о
| Устройство для управления сборочным роботом | 1981 |
|
SU989534A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления сборочным роботом | 1985 |
|
SU1247839A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
