оо
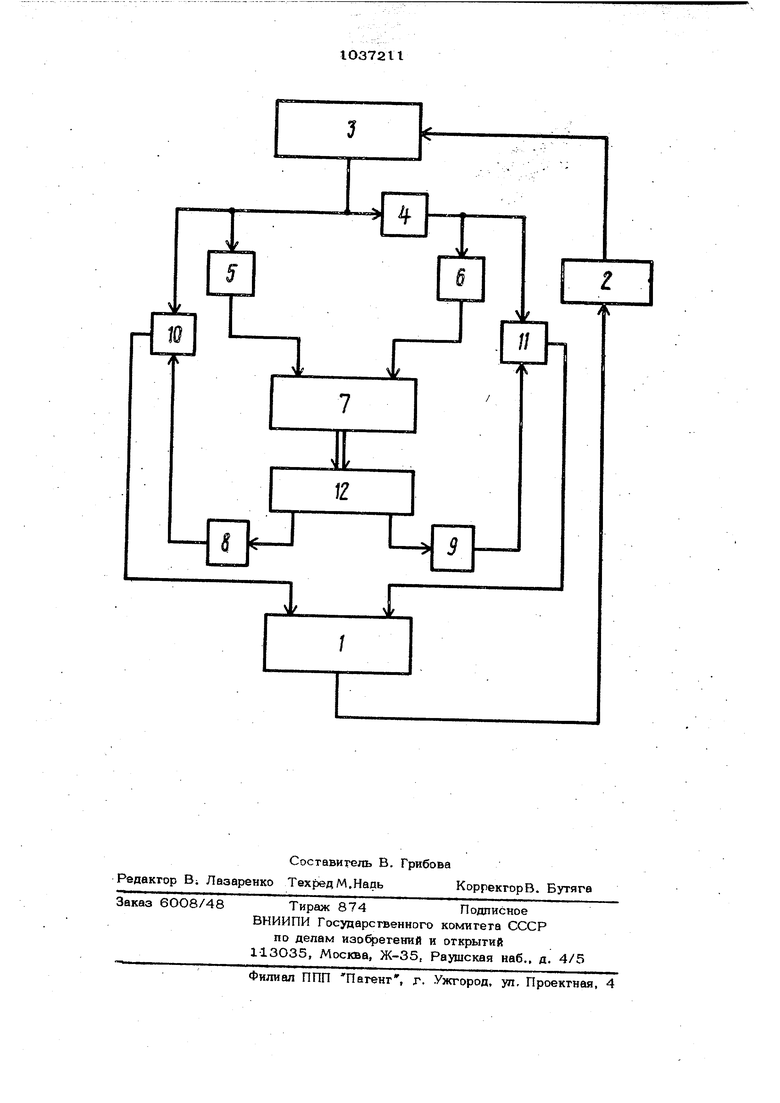
1C f1 Изобретение относится к робототехник и может боыть использована при создании цикловых роботов. Известно устройство для циклового управления промышленным роботом, содержащее блок задания программы, приводы, датчики конечного положения, элементы И, пульт управления и коммутатор кадров 1 . Однако это устройство Имеет сложный блок задания програмтиы. Наиболее близким по технической сущности к изобретению является устройство содержашее последовательно соединенные блок задания программы, первый распрбделитель и пневмотривод, связанный через исполнительный механизм с первым и вторым датчиками конечного попЬжениЯо выходы которых через соответствую щие элементы И подключены к первому и второму входам элемента ИЛИ, выходом соединенного через коммутатор кащэов с входом блока задания программы, выхо которого подключен к второму входу первого элемента И, а также второй распределитель, входом соединенш 1й с вторым входом второго элемента И, а выходом с вторым входом пневмопривода . Недостатками известного устройства являются большие габариты и сложность блока задания программы. Цель изобретения - упрощение устройства. Поставленная цель достигается тем, что устройство содержит элемент НЕ, через который выход блока задания программы соединен с входом второго распределителя. На чертеже представлена функциональная схема устройства. Устройство содержит элемент ИЛИ 1, коммутатор 2 кадров, блок 3 задания H программы, элемент НЕ 4, первый и второй распределители 5 и 6 соответственно, пневмопривод 7, первый и второй датчики 8 и 9 конечного положения соответственно, первый и второй элементы И .Ю и 11 соответственно, исполнительный механизм 12. Устройство работает следующим образом. Программа задается по кадрам, причем в каждом разряде кадра помещается информация для отработки движения по направлению к одной из двух взаимосвязанных точек по каждой из координат, приводящих схват промьпиленного робота в противоположные точки позиционирования. Считывание информации, записанной в кадре с блока 3, происходит после установки этого кадра коммутатором 2 по сигналу, сформированному в элементе ИЛИ 1, Информация, записанная в каждом из разрядов кадра, в завжзимости от ее уровня (логическая 1 или логический О) поступает либо прямо на распределитель 5, либо через элемент НЕ 4 на распределитель 6. В зависимости от этого один из двух распределителей 5 или 6 вьщает команду на .пневмопривод 7, который перемещает схват про 1ьпиленного робота по направлению к одной из двух взаимосвязанных противоположных точек координаты. При приходе схват а робота в требуемое положение, разрешающий уровень с датчика конечного положения 8 или 9 поступает на вход соответствующего элеента И 10 или 11 и с ее выхода на элемент ИЛИ 1. Применение изофетения за счет уменьения вдвое числа разрядов каждого када блока задания программы позволит упостить устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для циклового управления промышленным роботом | 1987 |
|
SU1463466A1 |
| Цикловая система программного управления промышленным роботом | 1980 |
|
SU935877A2 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Цикловая система программного управления промышленным роботом | 1983 |
|
SU1151927A2 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Цикловая система программногоупРАВлЕНия пРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807212A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления промышленным роботом | 1987 |
|
SU1511108A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
УСТРОЙСТВО ДЛЯ ЦИКЛОВОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ, содержащее порледовательно соединенные блок задания программы, первый распределитель и пневмопривод, связанный через исполнительный механизм с первым и вторым датчиками конечного положения, выходы которых через соответствукяцие элементы И подключены к первому н второму Екодам элемента ИЛИ, .выходом соединенного через коммутатор кадров с входом блока задания программы, выход кото. рого подключен к второму вход{г элемента И, a также второй распределитель, входом соединенный с вторым ввсо- дом второго элемента И, a выходом - с вторым входом пневмопривода, отличающее с я тем, что, с целью упрошення л устройства, оно содержит элемен НЕ, через который выход блока задания программы соединен с входом второго распределителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Белянин П | |||
| Н | |||
| Промышленные ребоил | |||
| М., Машиностроение, 1975, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Instructions Manual Rooks Hork-jA Инструкции по аксппуатааии (прототип). | |||
