ел
tc
Изобретение относится к машиностроению и может быть использовано в различных робототехнических устройствах.
Цель изобретения - устранение аварийных ситуаций за счет исключения самопроизвольного перемещения звеньев манипулятора.
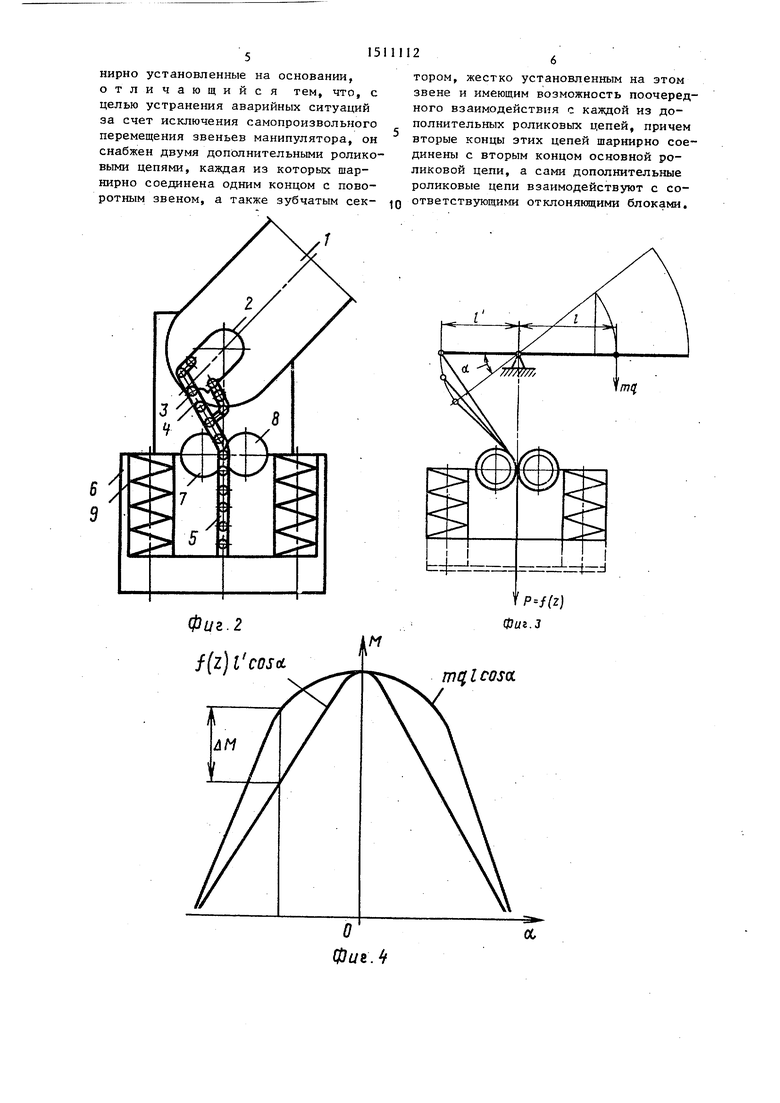
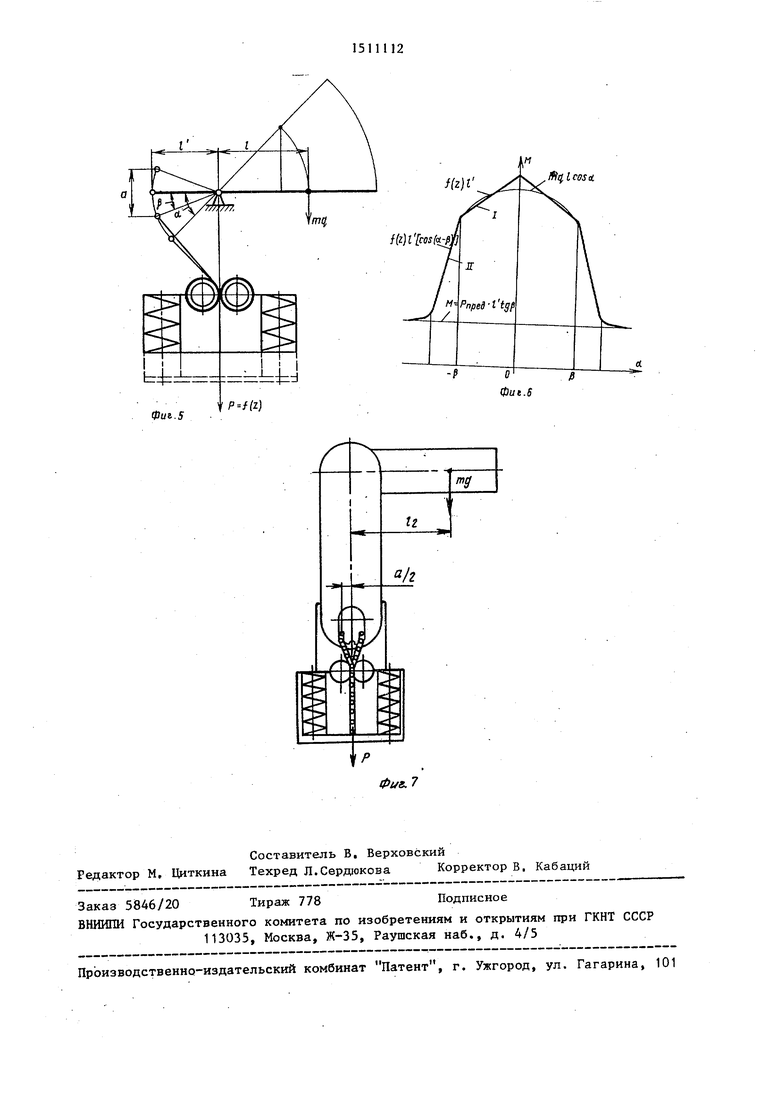
На фиг. 1 представлен механизм уравновешивания манипулятора при нейтральном положении поворотного звена; на фиг. 2 - то же, при отклонении поворотного звена от нейтрального положения; на фиг, 3 - расчетная схема механизма без учета работы зубчатого сектора; на фиг. 4 - графики моментов без учета работы зубчатого сектора; на фиг. 5 - расчетная схема механизма с учетом влияния работы зубчатого сектора;- на фиг. 6 - графики моментов с учетом влияния работы зубчатого сектора; на фиг. 7 - схема определения величины предварительног натяжения пружины.
Механизм уравновешивания манипулятора содержит закрепленный на оси шарнира поворотного звена i зубчатый сектор 2, по краям которого жестко закреплены дополнительные роликовое цепи 3 и А, основную роликовую цепь 5, по обе стороны которой на основании 6 установлены отклоняющие блоки 7 и 8, а второй конец цепи 5 связан с пружиной 9, закрепленной на основании 6.
Механизм уравновешивания работает следующим образом.
В нейтральном положении продольна ось поворотного звена 1 расположена вертикально. При этом за счет предварительного .натяжения пружин 9 до - полнительные роликовые цепи 3 и 4 взаимодействуют с отклоняющими блоками 7 и 8, что препятствует самопроизвольному выходу звена 1 из нейтрального положения. При повороте звена 1 под действием привода манипулятора (не показан) одна из дополнительных роликовых цепей, например, 4 оказывается разгруженной, а другая - взаимодействует с зубьями зубчатого сектора 2, жестко закрепленного на поворотном звене. При горизонтальном расположении поворотного звена 1 момент, создаваемый усилием пружины, имеет максимальную величину. При пе- ремещении манипулятора вверх величина момента от массы звена 1 с грузом изменяется по закону синусоиды. Для обеспечения высокой точности уравновешивания момент от усилия, создаваемого пружиной 9, также должен изменяться по закону синусоиды. Однако усилие пружины 9 при ее сжатии непостоянно и меняется по линейному закону. В этом случае при повороте
на угол d моменты от массы звена 1 с грузом и ОТ усилия сжатия пружины 9 неравны (фиг. 4), .т.е. РГ cosof i mgl cos d, при этом величина неравенства
cos o -Pl cos в(
Поэтому для компенсации изменений силы уравновешивания с целью обеспечения необходимого момента уравнове- шивания при повороте звена 1 в пределах некоторого угла (ь требуется сохранить неизменным плечо (фиг. 5). Это достигается тем, что точки крепления разветвленного конца в дополни
тельных роликовых цепях разнесены на
расстояние а, которое определяется предварительным сжатием пружины 9. При этом момент, создаваемый усилением предварительного сжатия пружины
9, определяется моментом от массы предплечья манипулятора с грузом (фиг. 7) при вертикальном положении поворотного звена 1 и горизонтальном положении предплечья. Однако
величина момента, создаваемого предварительным сжатием пружины 9, не должна превьшзать величину момента, создаваемого силовым модулем манипулятора.
Использование зубчатого сектора, закрепление на нем в разных точках ополнительных роликовых цепей на определенном расстояйии, создание предварительного натяжения цепи позволяет снизить при уравновешивании величину 4И до минимума, практически на участке 1 (фиг. 6) f(z)l mgl cos с/.
50
Формула изобретения
Механизм уравновешивания манипулятора, содержащий основание, поворотное звено, шарнирно соединенное 55 с основанием, пружину, жестко закрепленную одним концом на основании и кинематически связанную с поворотным звеном посредством основной роликовой цепи, а также отклоняющие блоки, шарнирно установленные на основании, отличающийся тем, что, с целью устранения аварийных ситуаций за счет исключения самопроизвольного перемещения звеньев манипулятора, он снабжен двумя дополнительными роликовыми цепями, каждая из которых шар- нирно соединена одним концом с поворотным звеном, а также зубчатым сектором, жестко установленным на этом звене и имеющим возможность поочередного взаимодействия с каждой из дополнительных роликовых цепей, причем вторые концы этих цепей шарнирно соединены с вторым концом основной роликовой цепи, а сами дополнительные роликовые цепи взаимодействуют с со- Q ответствующими отклоняклцими блоками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| Сварочный манипулятор | 1981 |
|
SU996156A1 |
| Промышленный робот | 1987 |
|
SU1407792A1 |
| Промышленный робот | 1980 |
|
SU931463A1 |
| Устройство для формирования пакетов круглых лесоматериалов | 1986 |
|
SU1370035A1 |
| Механизм уравновешивания манипулятора | 1987 |
|
SU1437215A1 |
| Промышленный робот | 1988 |
|
SU1563967A1 |
| Механизм уравновешивания промышленного робота | 1987 |
|
SU1445947A1 |
| АУТРИГЕР | 1997 |
|
RU2124993C1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |
Изобретение относится к машиностроению и может быть использовано в различных робототехнических устройствах. Цель изобретения - устранение аварийных ситуаций за счет исключения самопроизвольного перемещения звеньев манипулятора. В нейтральном положении продольная ось поворотного звена 1, шарнирно установленного на основании 6, расположена вертикально. За счет предварительного натяжения пружины 9, один конец которой жестко закреплен на основании, а другой соединен с основной роликовой цепью 5, дополнительные роликовые цепи 3 и 4, каждая из которых соединена с цепью 5, взаимодействуют с отклоняющими блоками 7 и 8, также шарнирно установленными на основании. Это препятствует самопроизвольному выходу звена 1 из нейтрального положения, так как цепи 3 и 4 шарнирно соединены с поворотным звеном. При повороте звена 1 под действием привода манипулятора одна из дополнительных роликовых цепей оказывается разгруженной, а другая - взаимодействует с зубьями зубчатого сектора 2, жестко закрепленного на поворотном звене, и передает на него уравновешивающее усилие пружины 9. 7 ил.
Фиг.2 f(z)l cOS(i
mi lcosa.
ос
Фиг. 5
f(z}t
/Ki lcasii
HZ)(P.
| Рука манипулятора | 1978 |
|
SU715317A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
