(Л
PtZ.l
Изобретение относится к машиностроению, а именно к промышленным роботам, предназначенным для перемещения полезной нагрузки по заданной схеме движений, которая заносится в память системы управления.
Цель изобретения - повьшение динамической точности за счет обеспечения регулирования уравновешивающего момента.
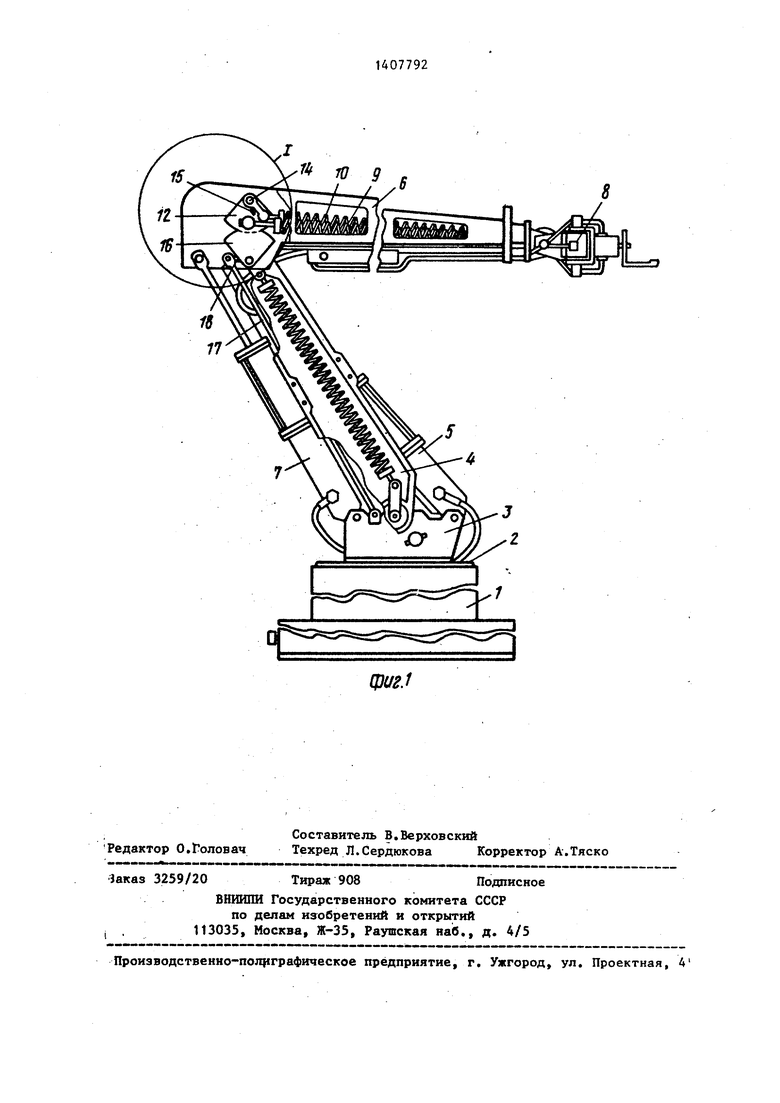
На фиг. 1 изображен промьшшекный робот, общий ВИД} на фиг. 2 - узел I на фиг. 1.
Промьшшенный робот содержит исполнительный орган из шарнирно сочлененных звеньев, устройство преббразо- вания энергии (не показано) и систему управления (не показана).
Исполнительный орган содержит не- подвижное основание 1 со смонтированной на нем гидроаппаратурой управления и привод поворотного основания 2 шарнирно закрепленного на основании 1 и имеющего кронштейны 3, звено-плечо 4, шарнирно закрепленное на поворотном основании 2 и имеющее привод 5, звено-предплечье 6, шарнирно закрепленное на звене-плече 4 и имеющее привод 7, систему шарнирнЬ сочлененных звеньев - кисть 8, вместе с приводами установленную на звене- предплечье 6, котором шарнирно закреплена одним концом каждая пружина 9 и 10. Другим концом пружины 9 и 10 шарнирно закреплены посредством натяжных винтов 11 на зубчатом секторе 12 и рычаге 13 соответственно, которые установлены на общем валу 14 с возможностью регулирования углового смещения между ними посредством винта 15, а вал 14 шарнирно закреплен на звене-предплечье 6, что сектор 12, рычаг 13 и вал 14 образуют качающийся двуплечий рычаг. Зубчатый сектор 12 входит в-зацепление с зубчатым сектором 16, расположенным на парал- лелограммном механизме, образованным звеном-плечом 4, кронштейнами 3, тягами 17 и рычагом 18.
Промышленный робот работает еле-
дующим образом.
I
При помощи натяжных винтов 11 производится предварительное натяжение пружин 9 и 10 и достигается уравновешивание звена-предплечья 6 в горизонтальном положении. Затем регулировкой углового смещения „рычага 13 относительно зубчатого сектора 12 посредством винта 15 и дополнительно регулировкой натяжения пружин 9 и 10 натяжными винтами 11 достигается соответствие суммарного уравновешиваю- щего момента от пружин 9 и 10 гравитационному моменту от веса звена- предплечья 6, кисти 8 и полезной нагрузки.
При движении звена-предплечья 6 зубчатьш сектор 12 обкатывается по зубчатому сектору 16 и изменяет величины плеч приложения сил от пружин
9и 10 к рычагу 13 и сектору 12 соответственно. При этом за счет углового смещения рычага 13 относительно сектора 12 моменты от сил пружин 9 и
10в каждом из положений звена-предплечья 6 имеют разные значения, а суммарный от них момент соответствует моменту от гравитатдионных сил.
Формула изобретения
Пpo шшIлeнный робот, содержащий основание, плечо, шарнирно соединенное с основанием, предплечье, шарнирно соеди,ненное с плечом, механизм уравновешивания предплечья, включаюг- щий первую пружину и двуплечий рычаг шарнирнЬ соединенный с пружиной одним плечом, отличаю щийся тем, что, с целью повышения динамической точности за счет обеспечения регулирования уравновешивающего момента, он снабжен параллелограммным механизмом, одно из звеньев которого жестко связано с основанием, и зубчатой передачей, оба колеса которой установлены на предплечье и одно из них жестко связано со звеном парал- лелограммного механизма, противолежат щим основанию, а другое колесо зуб- чатой передачи жестко связано с двуплечим рычагом механизма уравновешивания, при зтом последний выполнен из двух шарнирно соединенных между собой одноплечих рычагов и имеет устройство регулирования угла и жесткой связи между ними, а другое плечо двуплечего рычага шарнирно соединено с дополнительно введенной второй пружиной, установленной на предплечье.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1090546A1 |
| Механизм локтевого шарнира | 1982 |
|
SU1024080A1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| Механизм уравновешивания промышленного робота | 1987 |
|
SU1445947A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Промышленный робот | 1980 |
|
SU931463A1 |
| Широкозахватная толкающая волокуша | 1986 |
|
SU1344280A1 |
| Устройство для неразрушающего контроля | 1985 |
|
SU1295324A1 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
Изобретение относится к области машиностроения, а именно к про- мьшленным роботам, предназначенным для перемещения полезной нагрузки по заданной схеме движений, которая заносится в память системы управления. Цель изобретения - повышение динамической точности за счет обеспечения регулирования уравновешивающего момента. При движении звена-предплечья 6 зубчатый сектор 12 обкатьта- ется по зубчатому сектору 15 и изменяет величины плеч приложения сил от пружин 9 и 10 к рычагу 13 и сектору 12. При этом за счет углового смещения рычага 13 относительно сектора 12 моменты от сил пружин имеют разные значения, а суммарный момент от них соответствует моменту от гравита- ционньк сил. 2 ил.
фиг.1
| Манипулятор | 1982 |
|
SU1085804A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
